
一种双波段全极化SAR系统设计
2020-12-21 03:51唐月生钟小艳
雷达与对抗 2020年4期
周 林,唐月生,钟小艳
(中国电子科技集团公司第三十八研究所,合肥 230088)
0 引 言
现代战场侦察手段有光学、红外、SAR等手段。从目前的侦察技术来看,光学、红外可以实现长时间连续观测,但容易受到气候、烟幕、恶劣场景环境的干扰。合成孔径雷达(SAR雷达)属于主动微波遥感传感器,可以穿透云层、水汽,实现全天时、全天候工作,通过辐射一定能量的电磁波获取指定区域的地物场景回波数据,利用合适的信号处理算法得到场景的二维地物场景图像。
高波段SAR图像与光学图像类似,可提供地物、地貌的详细外表特征,但穿透性能很差。而低波段SAR图像能够穿透叶簇和地表,发现隐蔽目标,揭示叶簇和地表下的结构,但提供外表特征的能力较差。将多个波段的SAR数据进行融合可大大提高雷达对目标的检测和识别能力。本系统采用X和L两个波段。X波段的信号瞬时带宽可达600 MHz左右甚至更高,可以取得较好的距离分辨率,最高分辨率可达0.3 m,可以用于要求精细分辨的目标成像。L波段具有较宽的天线波束,可以同时观测较为广阔的区域,且L波段的信号具有一定的穿透能力,可以揭示隐藏在植被和一定的地面之下的目标。
此外,多极化SAR图像比起单极化SAR图像能获取更多的信息,提供更多的目标后向散射系数属性,利用目标几何图像信息(如取向、对称性)提高对目标的鉴别和分类的能力。多极化信息的融合技术是目标识别的又一方法,也是获取定量遥感的一种手段。
本系统具备X和L两种波段分时成像的能力,且通过变极化发射与变极化接收获得多极化图像,提供更为全面的场景目标信息。它采用高性能、高可靠、小型化技术路线,对航空环境具有很好的适装性。该系统在保证设备可靠运行的同时尽可能实现模块化、标准化设计,可为其他相似产品提供借鉴及互换能力。
1 双波段机载SAR全极化系统设计
1.1 系统组成
系统装入飞机平台,通过遥控遥测实现空中数据采集、机上数据实时记录、存储,并下传实时图像。系统组成框图如图1所示,分为地面设备和机上设备两部分。地面设备为地面显示控制终端,机上设备包括天线单元、低功率射频单元和综合处理单元。
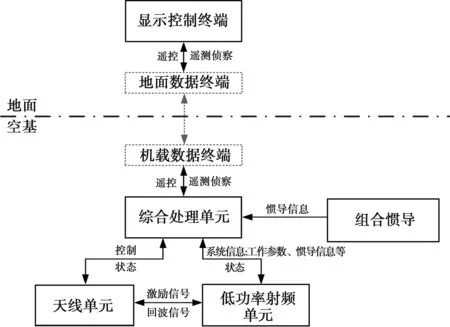
图1 全系统工作原理示意图
1.2 双波段射频一体化实现
本系统采用双波段射频一体化模块设计,使用同一频率源和数字收发,在收发通道中经过不同的收发支路完成X和L波段信号的收发处理。双波段采用独立天线背靠背设计,共用同一稳定平台,如图2所示。安装时通过法兰连接,同时天线稳定平台整体用天线透波罩进行防护。
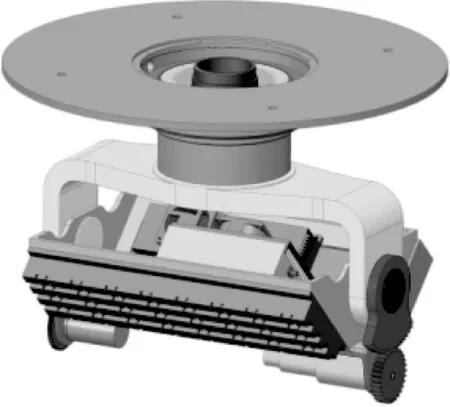
图2 双天线背靠背安装方式
1.2.1 收发通道
发射支路上,利用数字收发模块产生L波段宽带LFM信号,经滤波放大后直接输出L波段激励信号。X波段激励由L波段信号通过2倍频和一次混频产生。图3为激励通道设计框图。
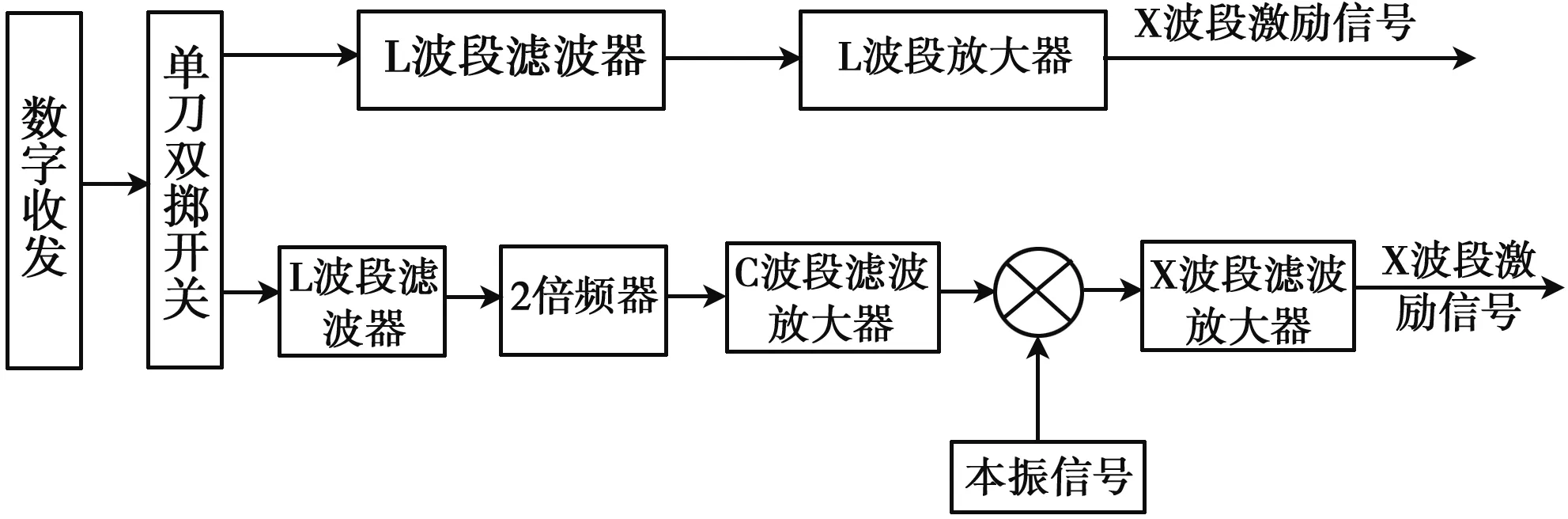
图3 激励通道设计框图
接收支路上,模拟收发模块的接收通道接收天线单元送来的回波信号。L波段经一本振混频到X波段,滤波放大后与二本振混频到S波段,在S波段直接正交解调后送数字收发模块中的高速采集,采集形成数字回波并与系统信息合成后通过光纤输出至信号处理。X波段回波滤波后直接与二本振混频生成S波段中频信号,后续与L波段回波处理相同。图4为接收通道设计框图。
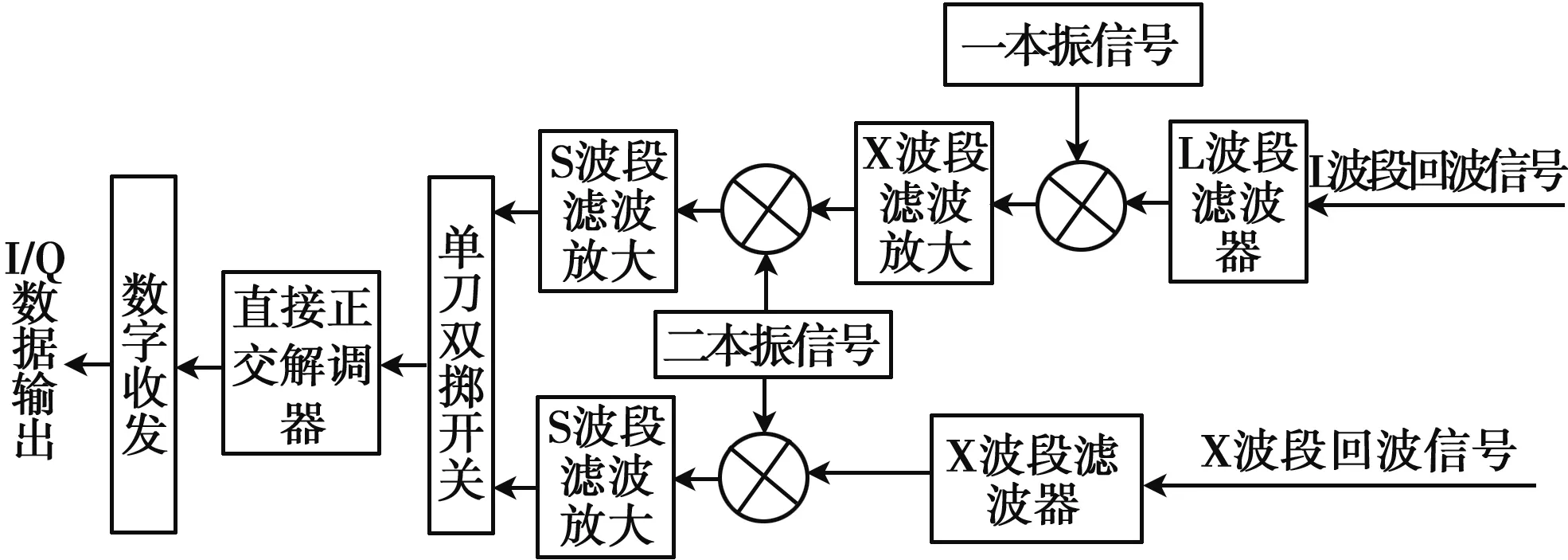
图4 接收通道设计框图
1.2.2 数字收发
系统的数字收发模块包含波形产生和数据采集两大部分,产生单元内部时序和控制。波形产生采用基于直接数字频率合成(DDS)技术,利用FPGA的并行DDS加高速DAC的方式来实现宽带波形输出。
该方法可以实现成像雷达需要的任意波形的实时产生。DDS功能框图(如图5所示)包括频率调制、相位累加和调制、相位幅度转换、逆Sinc补偿、幅度调制等几个部分。
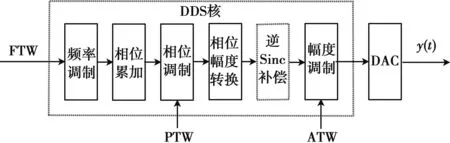
图5 DDS原理功能框图
数据采集的主要任务是数据采集、数据整合与高速传输。对于宽带I/Q采样,信号带宽500 MHz,采样时钟一般要在信号带宽的2.4倍以上。宽带数据采集原理如图6所示。
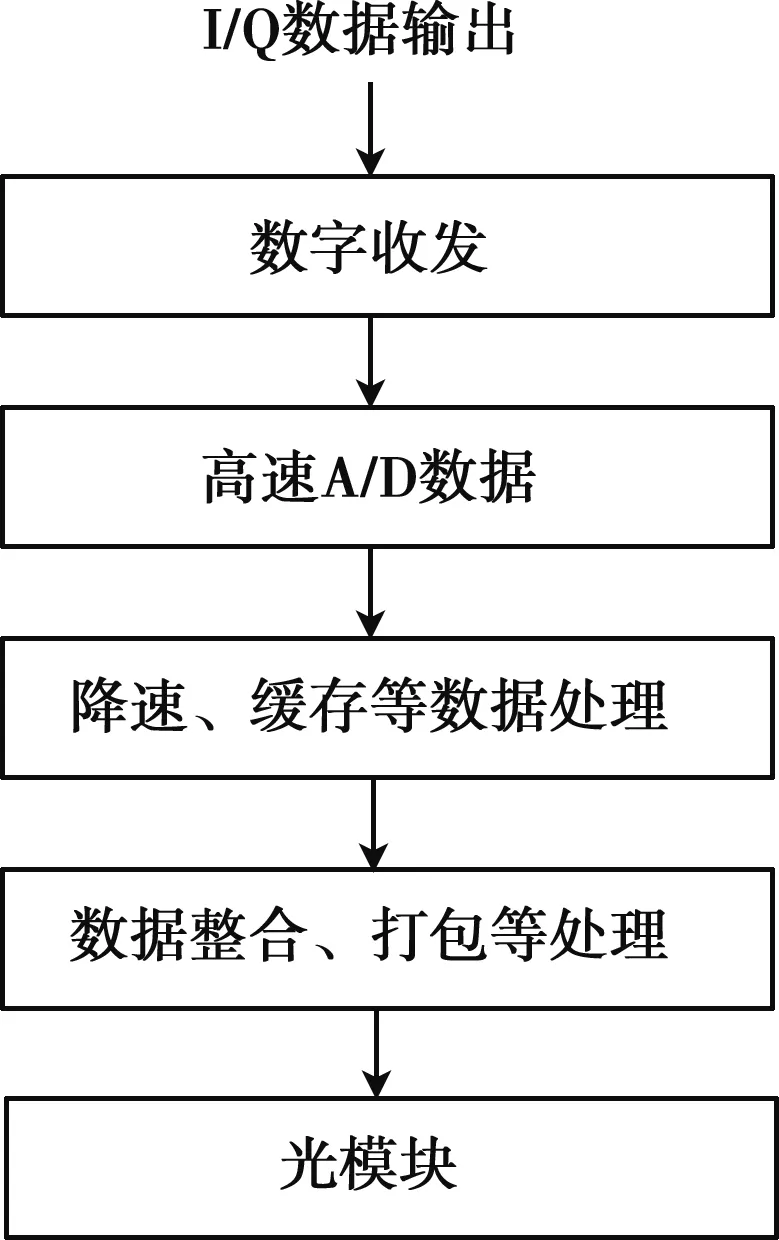
图6 数据采集和数字接收原理框图
1.2.3 频率源
频率源为系统提供高稳定、低相位噪声的频率源及全机定时、相参信号。本系统中需要用到X波段以上的本振频率点。对于如此高的单点频率,直接合成体积会过于庞大。为了减少体积和质量,采取取样锁相的方法实现。取样锁相具有合成频率高、基底相噪低、体积质量小、功耗低等优点,其缺点在于合成带宽窄且通常只能合成单点频率。本方案仅需单点即可,因此将晶振通过直接倍频和取样锁相就能满足本系统。
1.3 全极化实现方式
极化实现方式有3种:变极化发射与变极化接收、同时双极化发射与同时双极化接收、变极化发射与同时双极化接收。考虑到系统设备质量及功耗的限制,本系统采用变极化发射和变极化接收的方式实现。
系统采用双极化天线,通过极化开关实现发射水平极化波(H)或垂直极化波(V)、接收水平极化波(H)或垂直极化波(V),如图7所示。这种工作方式对系统设备的要求最低,只需要一个接收通道,但不能同时获取目标的4种极化信息,可分时(间隔4个PRT周期)获取4个极化信息。
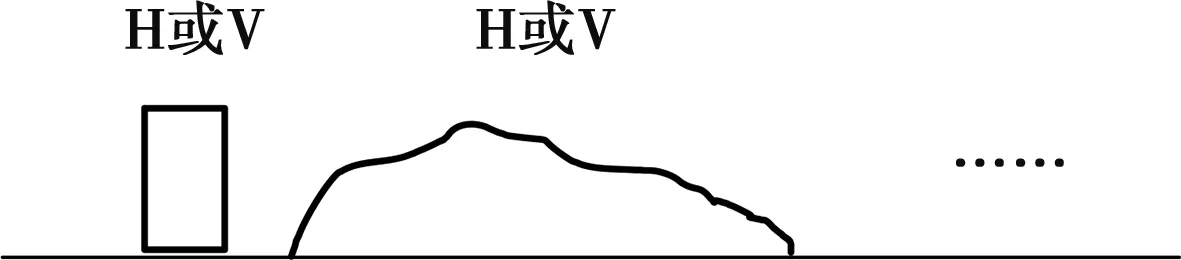
图7 变极化发射与变极化接收工作方式
1.4 轻小型平台高分辨成像
1.4.1 成像算法选取
目前,常用的成像算法有改进RD、CS、ωk等。在实时处理算法的选择上不仅要考虑算法的性能,同时还要满足实时处理流程的需要,减少对处理硬件资源的开销,并利于提高处理的效能,改进RD算法难以实现高分辨宽测绘带处理。CS算法处理性能和ωk相当,但CS算法在实时处理效能上明显低于ωk算法。此外,当波束存在一定斜视时,CS算法在高分辨下距离-方位耦合特性较为明显,而ωk算法可有效克服耦合问题。因此,系统选择的实时处理算法为ωk算法。
1.4.2 高分辨成像算法
国内目前对机载SAR运动补偿方法的研究较多。根据运动误差获取途径大致可分为基于运动传感器的运动补偿、基于原始回波的运动补偿和基于图像数据的运动补偿。
针对本项目成像合成孔径时间长、运动误差提取及补偿困难问题,单独采用上述方法均难以实现运动误差的精确获取。对基于图像数据的运动补偿方法来说,其补偿效果受限于回波场景。在缺少点目标特征的场景区,该方法的补偿效果将有所下降。因此,在运动误差估计方法上先采用惯导数据解算,得到初步的侧向扰动误差和非均匀采样特性,再对用于回波估计的样本数据进行均匀重采样和扰动误差补偿。由于回波估计中通常只用到波束中心区域的信息,因此对于样本数据的补偿可以使用窄波束的补偿方法,之后则可通过样本回波估计获取运动误差信息。
惯导数据解算主要通过惯导系统提供的速度、高度等信息建立成像空间模型,选定参考航迹。图8所示为东北天地理坐标系及参考航迹方向的回波重采样示意图。
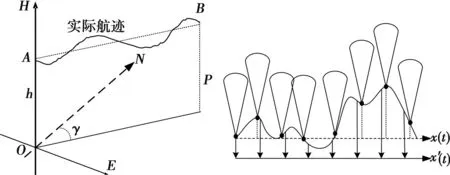
图8 东北天地理坐标系及样本回波重采样示意图
基于回波估计的过程主要是对补偿后的样本数据进行方位分段调频率估计拟合,获取运动误差参数。运动误差估计流程图如图9所示。对于样本回波数据的调频率估计,通常采用多次迭代的方法实现不同频率特性的误差估计。
在运动误差的补偿方面,运动误差的距离向空变特性通过分段拟合获得成像斜平面扰动误差予以补偿,运动误差的方位空变性则通过波束指向补偿。由于方位多普勒单元与方位角有对应关系,为了实现方位空变性补偿,在回波子孔径方位谱形成过程中,针对输出方位频谱对应的方位角补偿相应的运动误差方位分量,从而实现方位空变消除。与此同时,回波航迹向的非均匀采样也可在方位谱形成过程中一并消除,不需要额外插值重采样。结合上述运动补偿,将ωk算法进行相应修改,算法处理流程如图10所示。
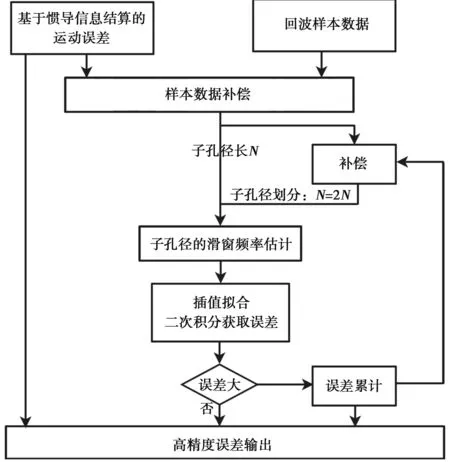
图9 运动误差估计流程图
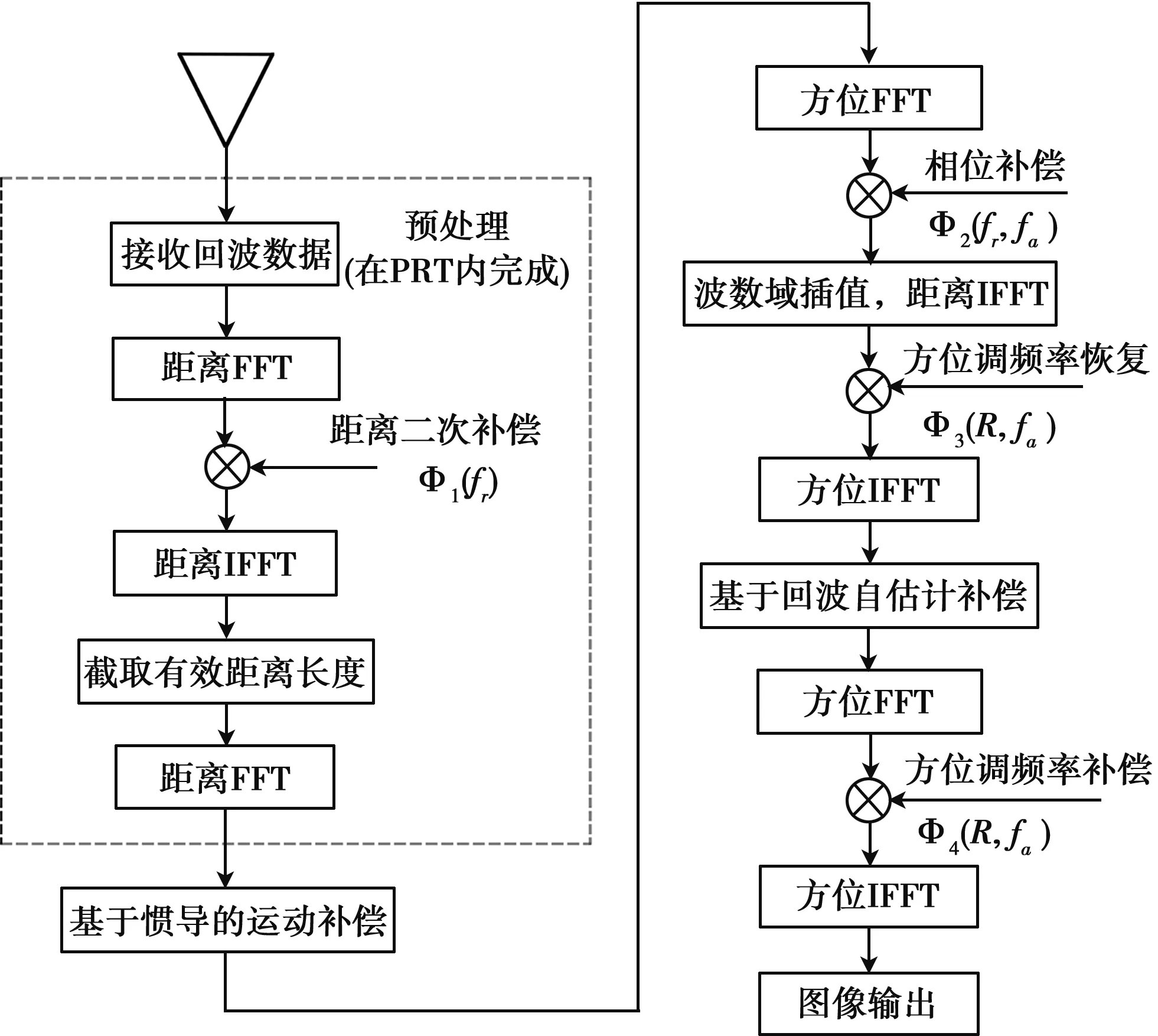
图10 条带SAR成像处理流程
2 系统试验结果分析
该系统于2018年搭载无人机载直升机开展了飞行试验,对居民区和自然场景进行观察,获得了X/L双波段全极化的图像数据。
2.1 X/L双波段成像
X波段可实现类光学的高分辨成像(见图11),纹理特征清晰,但波束较窄,因飞行颠簸波束存在抖动,成像存在黑白间隔的条纹,且图像多为目标表面轮廓(见图12a)。L波段波束较宽,对航姿变化不敏感,因L波段有一定穿透能力,图像可看到部分淹没在树林中的小路(见图12b)。
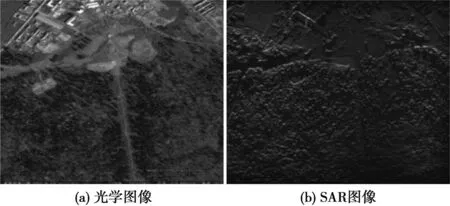
图11 某乡镇X波段0.3 m分辨率成像(局部)
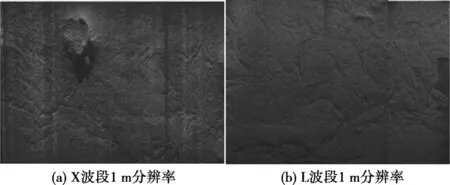
图12 某林区双波段1 m分辨率SAR图像
2.2 全极化成像
以L波段1 m分辨率全极化工作模式为例,成像结果见图13、图14和图15所示。从图13可以看到,全极化模式下,同极化(HH极化和VV极化)回波较强,交叉极化(HV极化和VH极化)回波较弱。图14给出了各单极化成像结果,图15为各单极化图像(HH极化、HV极化和VV极化)通过pauli分解原理进行RGB三色融合后的伪彩图像。
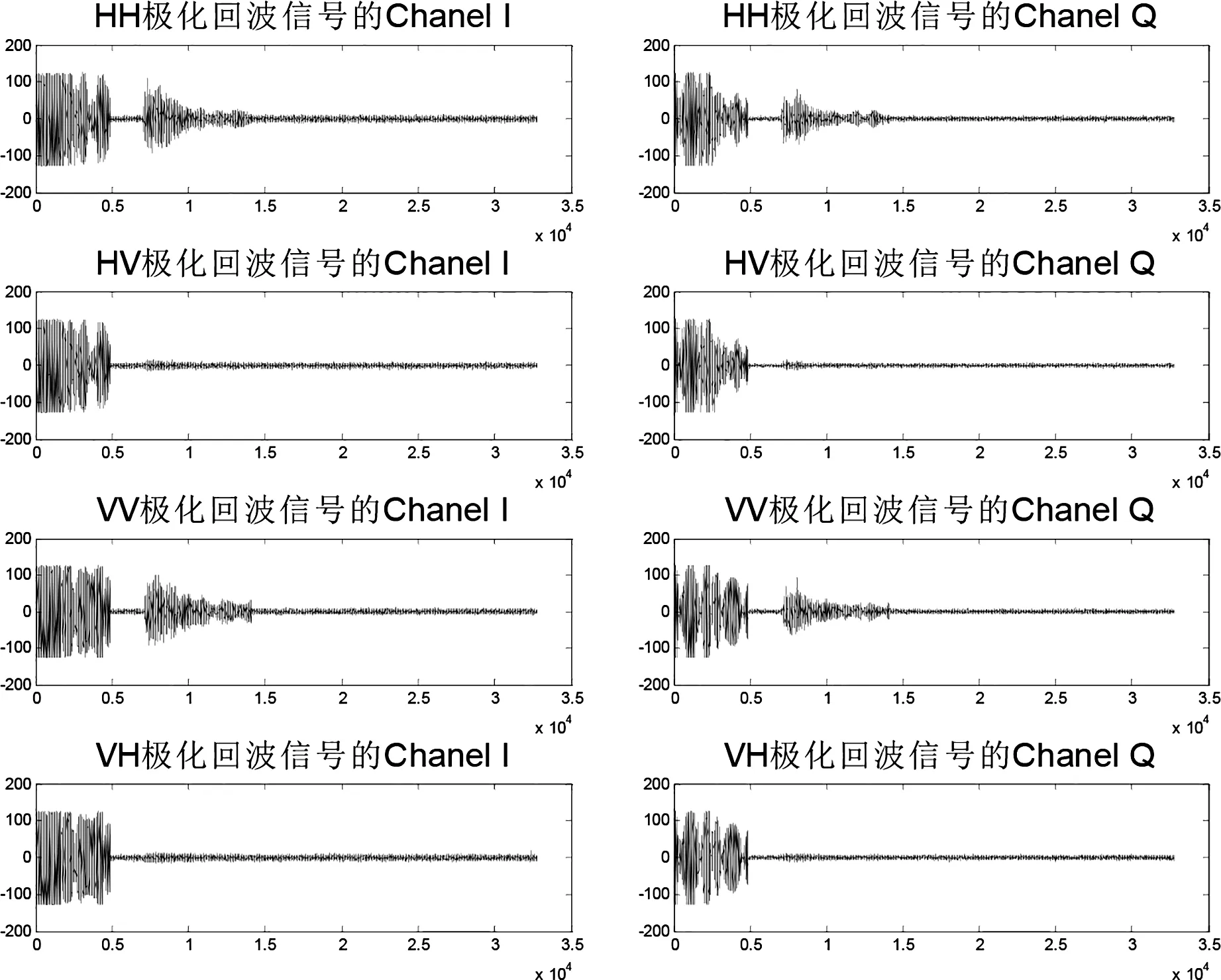
图13 回波时域波形(起始强回波为耦合激励信号)
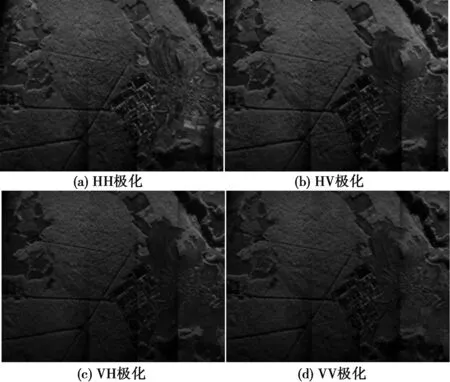
图14 SAR单极化图像

图15 SAR全极化融合图
3 结束语
本系统采用X和L双波段,在获得X波段高分辨成像的同时,通过L波段获得一定的穿透能力,可以揭示隐藏在植被和一定的地面之下的目标,而多极化功能可使系统获取比单极化更多的几何特征信息,进一步提高对目标的鉴别和分类能力。本系统质量较轻,设备量少,非常适合安装于各种小型机载平台。通过飞行试验,获得了乡镇院落和林区场景的X/L双波段全极化的图像数据,验证了系统设计的实用性,为后续设备实现多波段、多极化和高分辨SAR系统提供技术参考。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
航天电子对抗(2022年2期)2022-05-24
航天返回与遥感(2022年2期)2022-05-12
波谱学杂志(2022年1期)2022-03-15
北京航空航天大学学报(2021年9期)2021-11-02
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
雷达学报(2021年1期)2021-03-04
船海工程(2020年2期)2020-06-08
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
