基于多频涡流信号处理的结构识别方法
2020-12-19 07:58:08冯美名张志义廖述圣魏文斌
无损检测 2020年3期
陈 姝,冯美名,张志义,廖述圣,魏文斌
(中核武汉核电运行技术股份有限公司,武汉 430223)
涡流检测是以电磁感应原理为基础的一种常规无损检测方法[1-2]。检测时,线圈不需要接触工件,也无需耦合介质,检测速度快,对工件表面或近表面缺陷的检测灵敏度高。金属表面感应涡流的渗透深度随激励频率的变化而变化,频率高时金属表面涡流密度大,涡流渗透深度浅;随着频率的降低,涡流渗透深度增加,但表面涡流密度减小。由于涡流检测的这种特性,在核电设备检测中,可以利用低激励频率得到的信号检测支撑板和弯管等结构信息,用高激励频率和低激励频率得到的信号来检测表面缺陷。因此,涡流检测在无损检测技术中具有重要的地位。
在蒸汽发生器中,传热管及其支撑板数量多,内部液体腐蚀和各种振动对传热管的某些部位,特别是支撑板与传热管外壁接触处的影响较大。在涡流检测中,为了有效分析核电设备的缺陷属性,必须将结构信息全部检测出来,既不能有虚假结构,又没有漏掉任何一个结构信息,这样才有可能更好地确认缺陷的位置和类型,明确缺陷的危害程度,避免核电事故。
多频涡流信号检测面临的问题是,整体信号幅度摆动大,一些关键部位(如弯管处)的支撑结构信号和弯管信号交叉,能量高低变化,结构分布不均匀,且信号噪声严重。
针对上述问题,提出了基于多频涡流信号处理的结构识别方法。该算法选取低频通道信号,运用旋转变换的方式,找到噪声能量最小的水平分量,确定水平分量趋势线,消除摆动,再确定结构位置和数量。
1 传热管的结构识别算法和流程
从多频涡流仪获得的信号分为高频、中频和低频信号,每一频率的信号又分为差分信号和绝对信号,这些信号可分解为水平分量和垂直分量,可将其理解为复信号的实部和虚部。因此,下载的数据阵通常包含很多列信号。把含有最强结构信息的低频绝对通道信号作为确定结构的首选。
假定从涡流仪获得的数据已转换成可运用软件MATLAB处理的文本(不妨设为Data.txt)文件。
首先,下载数据文件Data.txt,显示数据并观察,确定结构识别区域IdentifArea及其长度Length,选取低频绝对通道在识别区域IdentifArea内的水平分量和垂直分量数据Data(IdentifArea,i:i+1),将其记为Channel,作为下面处理的核心数据。
其次,将Channel数据点绕坐标中心旋转1°~180°(这里度数分辨率为1°),将其水平分量用矩阵TotalR标记,其维度为Length×180,找出TotalR中噪声影响最小的水平分量TotalR(:,Index)、趋势线Trend(:,Index)及其差值Diff(:,Index),主要包括:① 运用中值滤波方法(滤波器长度大于2倍的最大支撑结构长度)求出矩阵TotalR每一列的趋势线,并以矩阵Trend记之;② 求出矩阵Trend中每列趋势线的纵向距离,并以向量R记之;③ 求出向量R的最小值位置索引Index;④ 求得噪声影响最小的水平分量TotalR (:,Index)、趋势线Trend(:,Index)及差值Diff(:,Index)。
然后,设置结构信号幅度阈值Threshold和最小结构间距阈值MinInteral,求出TotalR(:,Index)中支撑结构信号的数量TSPNum和位置TSPPosition。① 根据给定的阈值Threshold,将Diff(:,Index)中大于Threshold的分量记为1,否则记为0,以向量Constr记之;② 找出Constr向量中相邻1的首尾位置,从而确定相邻1的中心位置,以向量IniPosition记之;③ 根据最小结构间距MinInteral,保留IniPosition中间距大于MinInteral的分量,以向量TSPPosition记之,其长度即为TSPNum。
同样地,求TotalR(:,Index)中弯管的数量TBNum和位置TBPosition,只需将Diff(:,Index)取负号,利用上述参数Threshold和MinInteral即可。
最后,显示支撑板和弯管等结构的个数以及位置信息。
传热管的结构定位和识别流程如图1所示。
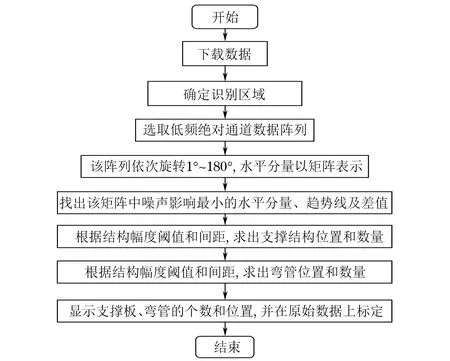
图1 传热管的结构定位和识别流程
2 传热管的结构识别技术
2.1 信号旋转


(1)
由X1和X2构成的m×2维矩阵[X1X2]旋转θ后,变为[X1cosθ-X2sinθX1sinθ+X2cosθ]。

(2)
信号旋转改变不了结构的相对位置,但可以改变信号的幅度和噪声能量,旋转的目的在于从Channel旋转得到的矩阵TotalR中找到噪声影响最小的水平分量,以便于结构定位识别,甚至后续的缺陷提取。
2.2 信号抖动趋势线提取
中值滤波是一种非线性平滑技术,其是基于排序统计获取位于中间的值而不是平均或加权平均值的方法。例如,向量A=[1,4,8,4,1,199,2,3,-20],排序后得到的PA=[-20,1,1,2,3,4,4,8,199],其中值为3,均值为22.444 4。显然,奇异值对均值会产生影响,而对中值影响不明显。
在该问题中,低频绝对通道结构信号幅值远大于没有结构的信号幅值,而且相较整段信号,结构信号占空比小。只要滤波区间较大,例如长度取最大结构宽度的2倍以上进行中值滤波,则可以消除结构影响,获得抖动趋势线,而且随机噪声仍保留在其中。
2.3 信号长度的纵向距离刻画
每一个旋转了一定角度的水平分量信号,其抖动趋势线既含有抖动信息又含有噪声信息。要找到抖动幅度和噪声能量最小的那个趋势线,可以采用趋势线长度的纵向距离刻画。
设第i个抖动趋势线为Trend(:,i),其长度的纵向距离定义为

(3)
2.4 信号最小分量的位置索引
利用给定信号求出最小位置索引的方法很多,如遗传算法。这里直接引用MATLAB软件中的函数min进行索引。
2.5 传热管结构定位
在低频绝对通道的多个旋转信号中,一旦选定了高信噪比的一组信号,就可以对结构进行定位识别。假定支撑板信号向上,由于支撑板位置的信号幅度远大于其他位置的,首先将差值信号Diff通过阈值处理,将可能的支撑板位置和非支撑板位置以1和0进行分类,再通过逻辑判断,找到可能的支撑板首尾位置,接着通过首尾平均取整,找到可能的支撑板中心位置,然后通过最小结构间距排除相邻相同目标被判断成多目标的可能性,最后得到支撑结构位置向量及个数。低频绝对通道的结构信号中,弯管信号和支撑板信号方向相反,因此只需要将上面的Diff信号取负,然后按照支撑板定位识别方法操作即可。
2.6 传热管结构识别技术
运用同一涡流仪探测同一类型的蒸汽发生器(SG)传热管,传热管支撑板和弯管识别也不难。例如,对某核电站某型SG支撑结构进行识别,支撑板分布稀疏均匀、数量多、信号方向一致,弯管信号数量少、与支撑板信号相反,这些特性都可用于识别判断。
3 运用SG传热管涡流数据进行验证
图2,3为两个核电站的两根传热管低频绝对通道的水平和垂直分量。可以看出,两组信号普遍存在信号摆幅过大,结构间距不均匀的问题,A核电站信号噪声更大,B核电站弯管处的结构信号能量过小。运用这些数据直接进行结构识别的准确率并不高。
图2的结构识别算法使用的参数如表1所示。
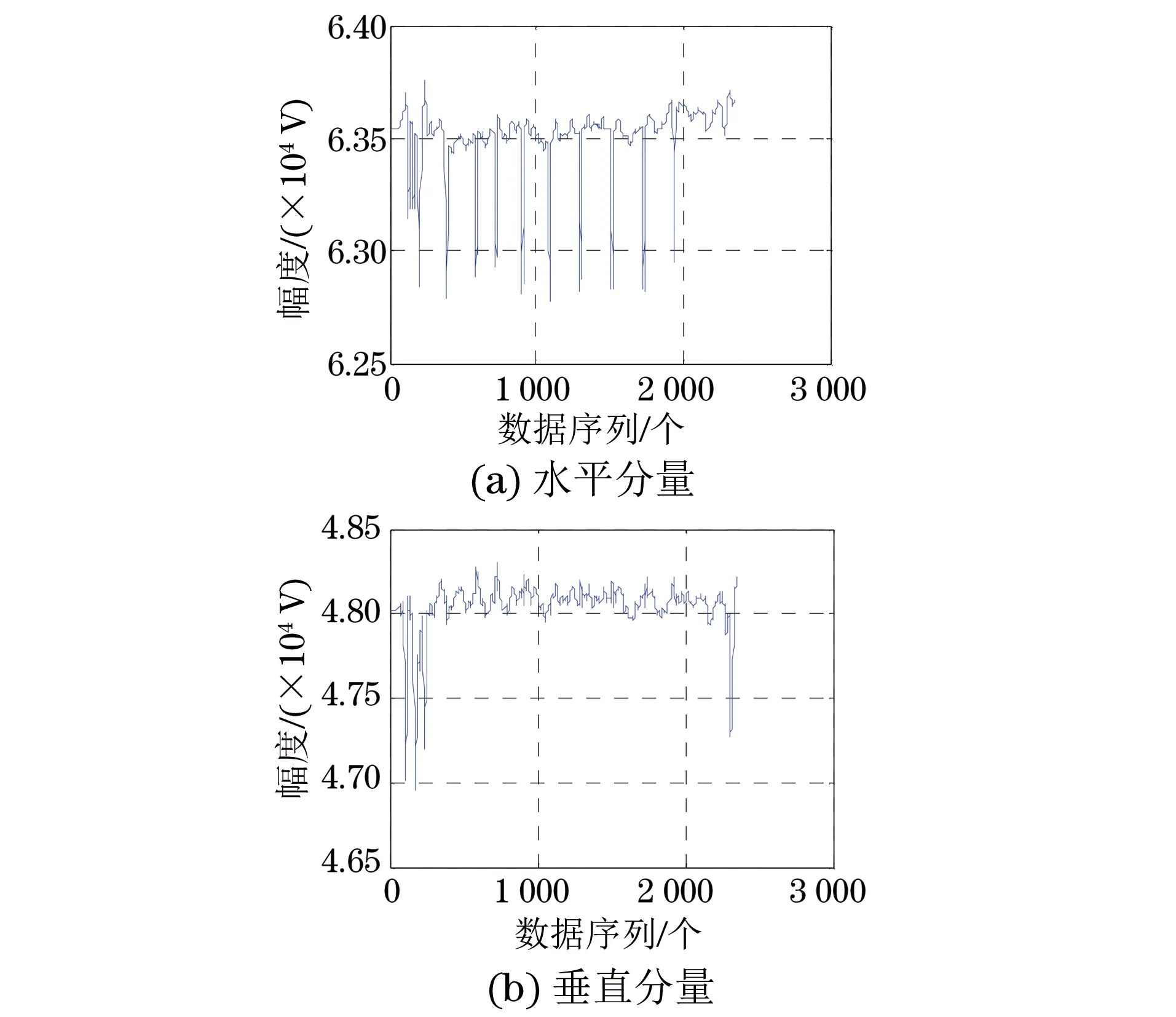
图2 A核电站低频绝对通道的水平和垂直分量
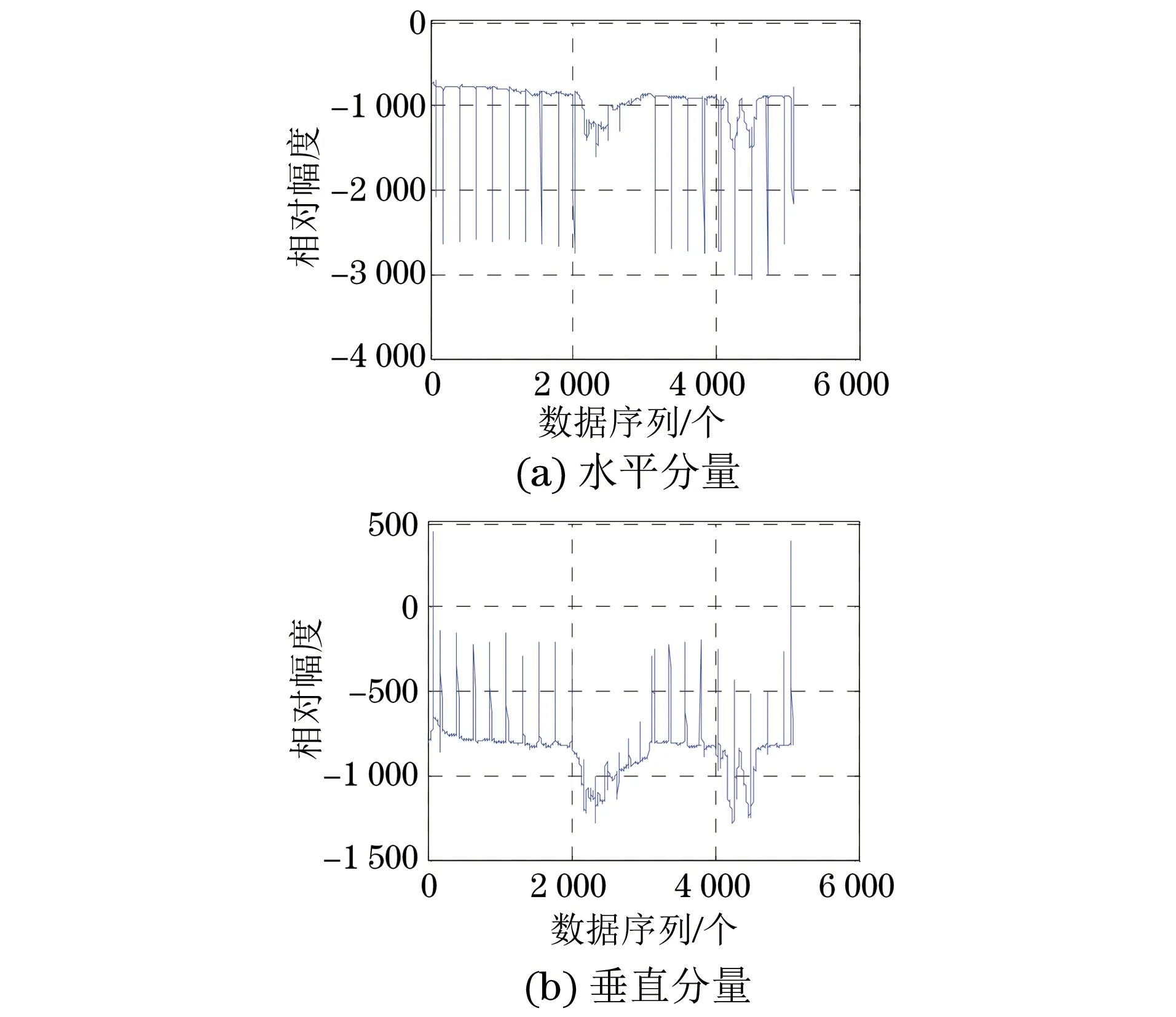
图3 B核电站低频绝对通道的水平和垂直分量
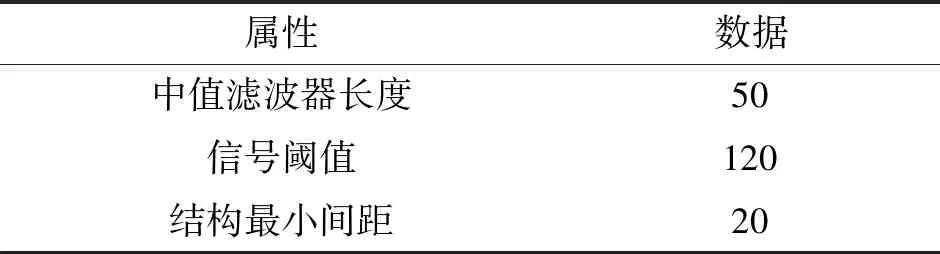
表1 图2的结构识别算法使用的参数
算法处理结果:有12个支撑结构4个弯管。支撑结构位置用向量表示为[132 161 206 389 595 723 908 1 094 1 301 1 515 1 733 1 937],弯管位置为[110 177 239 2 315]。
A核电站SG传热管结构定位识别效果如图4所示。
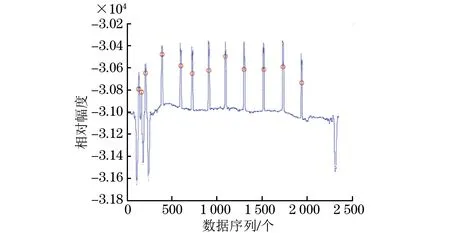
图4 A核电站SG传热管结构定位识别效果
可以看出,运用该算法不仅可以定位结构位置,而且能识别出弯管和支撑结构的信号。
图3的结构识别算法使用的参数如表2所示。
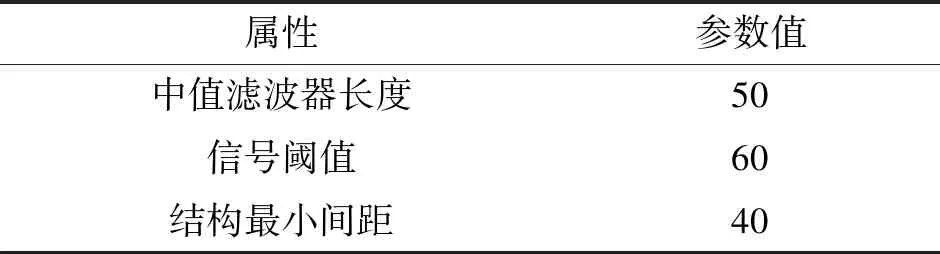
表2 图3的结构识别算法使用的参数
算法处理结果:弯管信息不明显,支撑结构有26个,位置为[77 191 421 651 880 1 108 1 335 1 563 1 789 2 013 2 175 2 333 2 493 2 658 2 815 2 976 3 147 3 373 3 600 3 827 4 053 4 280 4 508 4 738 4 965 5 077]。
B核电站SG传热管的结构识别效果如图5所示。
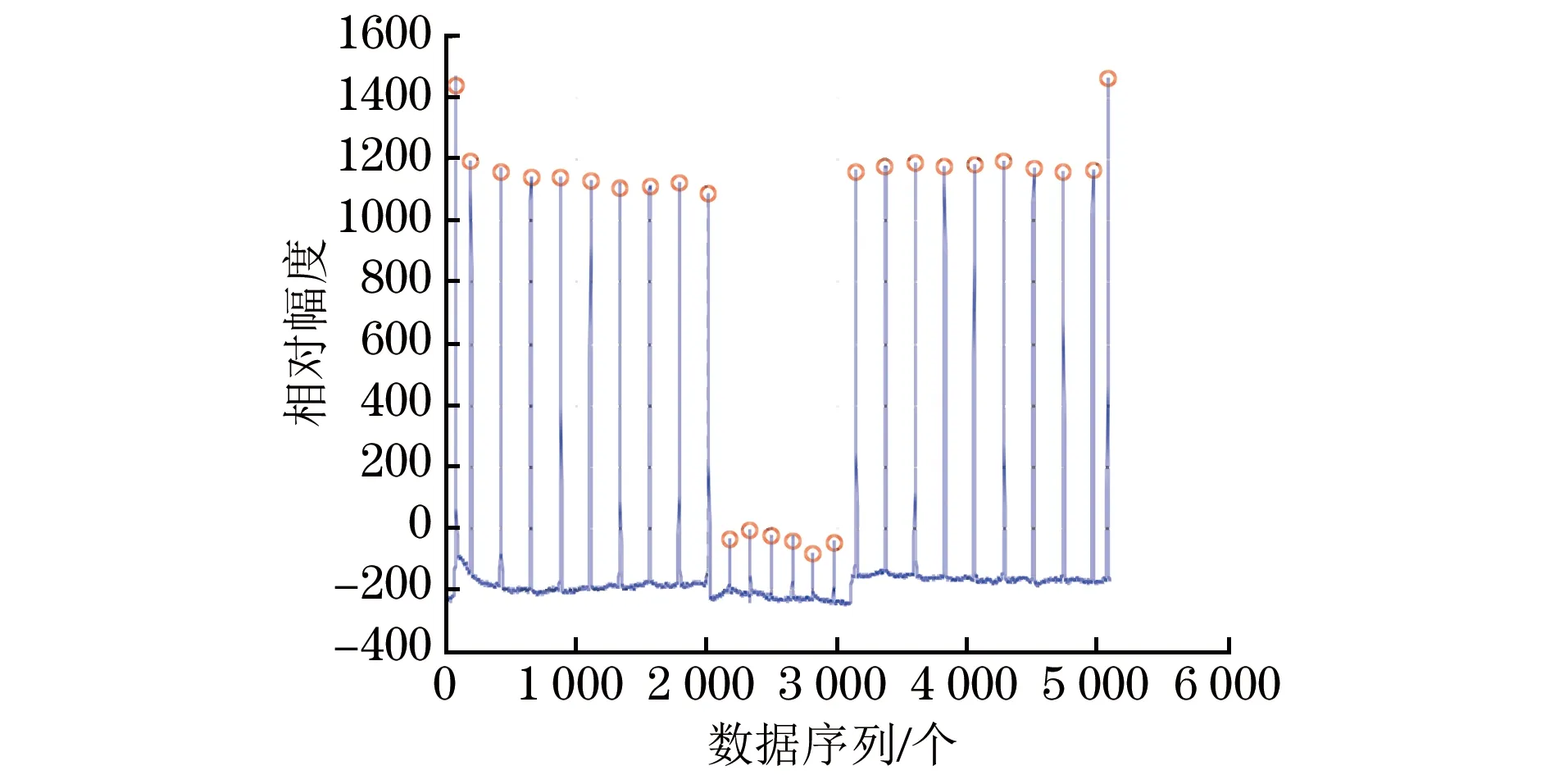
图5 B核电站SG传热管的结构识别效果
从上面的识别结果可以看出,该算法不仅能抑制噪声,使摆动趋势线最大限度线性化,还能通过消除趋势线找到最小结构的信息。
4 结语
针对涡流信号和涡流信号中结构的特点,提出了传热管的结构识别算法。该算法选取低频绝对通道信号,运用旋转变换的方式,找到摆动趋势线纵向距离最短、噪声能量最小的水平分量,然后对其进行中值滤波,寻找摆动趋势线,消除摆动,通过幅度阈值和结构分辨率确定结构位置和数量。运用来自核电站SG传热管的数据进行结构识别表明,同一类传热管可采用相同参数进行结构自动识别,对不同类传热管,只要适当调整好参数,该算法仍然有效。只要信号合格,参数调整适当,该算法识别准确率可以达到100%。
猜你喜欢
飞碟探索(2022年2期)2022-05-31 01:28:03
基层中医药(2021年12期)2021-06-05 06:56:26
装备制造技术(2020年11期)2021-01-26 00:39:12
智族GQ(2019年9期)2019-10-28 08:16:21
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
通信电源技术(2018年5期)2018-08-23 01:16:00
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
中国核电(2017年2期)2017-08-11 08:01:12
纺织科学研究(2017年6期)2017-07-03 12:14:15
能源(2016年3期)2016-12-01 05:11:05