
基于刚柔耦合的航炮炮口振动研究
2020-12-19 06:16刘圣强殷鹏贤
舰船科学技术 2020年11期
刘圣强,殷鹏贤,陈 雷,李 利
(郑州机电工程研究所,河南 郑州 450000)
0 引 言
射击精度是考核航炮射击性能的一项重要指标,除了内外弹道因素对航炮射击精度有影响外,航炮炮口的振动也是重要的影响环节,有时可能是首要影响环节[1]。本文基于有限元理论对航炮身管和炮口夹箍等易变形的构件进行模态分析并得到身管和炮口夹箍的模态中性文件。在此基础上,利用多体动力学理论在动力学仿真软件ADAMS 中构建航炮的刚柔耦合动力学虚拟样机模型,分析了不同射速下航炮连发射击时炮口的动态响应[2]。
1 刚柔耦合模型的建立
在进行航炮炮口振动规律的研究时,把与炮口扰动关系紧密、易变形的身管、炮口夹箍作为柔性体,把其他变形量小、与炮口振动无关的构件处理成刚体,利用有限元理论在Ansys 中对其柔性体构件建立模态中性文件[3],利用多体动力学理论在动力学仿真软件ADAMS 中建立刚柔耦合模型[4 –5],进行仿真计算,得到航炮自动机连续射击时炮口的振动规律。
在ADAMS 中,分别以刚体质心的笛卡尔坐标、能够反映刚体位移的广义欧拉角以及欧拉角作为物体坐标系的广义坐标:
系统的动力学方程采用拉格朗日算法:

全约束方程为:

欠约束方程为:

式中:T,Q 分别为系统的动能和广义力列阵;q,ρ,μ 分别为系统广义坐标列阵,完全约束拉式列阵和不完全约束拉式列阵[6]。
约束多体动力学方程如下:

通过上述方程,分别给出了ADAMS 中的坐标定义、动力学方程以及多体动力学各参数之间的函数相关量,因此可利用ADAMS 软件对模型的运动参数和力参数进行求解[8]。
ADAMS 建立刚柔耦合虚拟样机模型的流程如图1所示。
蚜虫喜欢群居叶背、花梗或嫩茎上,吸食植物汁液,分泌蜜露。被害叶部变黄,叶面皱缩卷曲。嫩茎、花梗被害呈弯曲畸形,影响开花结果,植株生长受到抑制,甚至枯萎死亡。
航炮射击过程中,身管和炮口夹箍的弹性变形对射击精度的影响不容忽视,因此本文主要对身管和炮口夹箍这两个构件建立柔性体,在刚柔耦合模型中采用模态法来描述柔性体的变形。
1.1 柔性体-身管的模态计算与刚性区域的建立
为了方便与其他的刚体或柔性体建立连接关系、载荷、接触或者约束,在柔性体建模时需要建立可与外界进行信息交换的刚性节点[9]。

图1 ADAMS 中刚柔耦合建模流程Fig.1 Modelling flow charts of rigid-flexible coupling in ADAMS
在Ansys 中计算得到的柔性体-身管的各阶模态,身管、炮口夹箍的材料为钢,其密度为7.85×103kg/m3,弹性模量为 E=210 GPa,泊松比为0.31。
在身管和炮口夹箍的有限元模型中,利用有限元理论计算得到身管和炮口夹箍各阶模态的固有频率。目的在于:一方面得到身管-炮口夹箍组件各阶模态的固有频率,与自动机的射频进行比较,观察在射击过程中是否发生共振,来验证身管结构设计的合理性;一方面得到身管-炮口夹箍组件各阶模态的振型,为后续结构的改进提供理论依据[10]。
身管主要与炮口夹箍、炮尾、前后衬套连接,因此有4 个界面节点(即刚性节点)。柔性身管利用固定副实现刚性节点与刚性炮尾、刚性衬套以及柔性炮口夹箍的连接,保证了载荷(炮膛合力)均布分在身管后端面的每个节点上。其他柔性构件的连接也采用上述方式,由于建立刚性节点的方法相同。柔性体身管在Ansys 中的刚性区域建立如图2 所示。
计算身管-炮口夹箍组件的模态时,根据航炮自动机的实际支撑方式对其添加约束,身管-炮口夹箍组件的约束方式为后端面固定,其约束方式如图3 所示:
通过分析可以得出以下结论:
1)身管-炮口夹箍的第1 阶和第3 阶模态以弯曲振型为主,第2 阶和第4 阶模态以扭转为主。

图2 Ansys 下身管刚性区域Fig.2 Rigid region of gun tube in Ansys

图3 身管-炮口夹箍组件的约束方式Fig.3 Restraint mode of gun tube-muzzle clamp
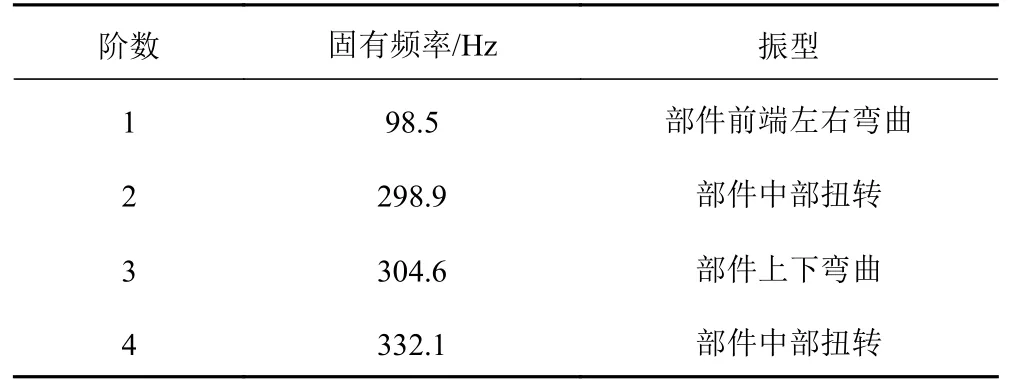
表1 身管-炮口夹箍1~4 阶模态的频率与振型Tab.1 4 extended modal frequency and shape of gun tube - muzzle clamp

图4 身管-炮口夹箍前4 阶振型Fig.4 4 extended modal shape of gun tube - muzzle clamp
2)航炮自动机的射速为3000 发/分,振动频率为50 Hz,由表1 得到该身管-炮口夹箍组件的前4 阶模态振动频率范围为98–333 Hz。因此在正常射击工况下,该结构各阶频率远离了载荷激励频率,其本体不会出现共振情况,其他频率皆分布在高频段,这说明了身管-炮口夹箍频率结构设计的合理性。
1.2 炮口夹箍的模态计算与刚性区域建立
利用Ansys 计算得到炮口夹箍在约束状态下前6 阶模态的固有频率,约束方式为一端固定,与身管接触的孔为径向方向位移约束,约束方式如图5所示。

图5 炮口夹箍组件的约束方式Fig.5 Restraint mode of muzzle clamp
炮口夹箍前6 阶模态的固有频率如表2 所示,振型图如图6 所示(频率相同的振型已整合)。

表2 炮口夹箍1~6 阶频率与振型Tab.2 6 extended modal frequency and shape of muzzle clamp

图6 炮口夹箍各阶振型Fig.6 Modal shapes of muzzle clamp
炮口夹箍有6 个界面节点(即刚性节点)分别与3 根身管相连。柔性体炮口夹箍在Ansys 中的刚性区域如图7 所示。

图7 炮口夹箍刚性区域的建立Fig.7 Establishment of muzzle clamp rigid region
通过以上分析可以得出结论:炮口夹箍在约束状态下的前3 阶振动频率远远大于载荷激励频率,说明了炮口夹箍结构设计的合理性。
2 航炮刚柔耦合虚拟样机的建立
将建立好的柔性体(身管和炮口夹箍)导入动力学仿真软件ADAMS 中,建立航炮虚拟样机模型。刚体与柔体的约束一般都可以直接用ADAMS 中的常用约束副来完成,可以通过约束柔性体上的刚性节点和刚体上的marker 点实现的。刚体与柔体的接触在ADAMS 中一般选择flexible-solid 接触来实现。
自动机刚柔耦合虚拟样机中刚体和柔性体约束如表3所示,得到自动机刚柔耦合虚拟样机模型如图8 所示。
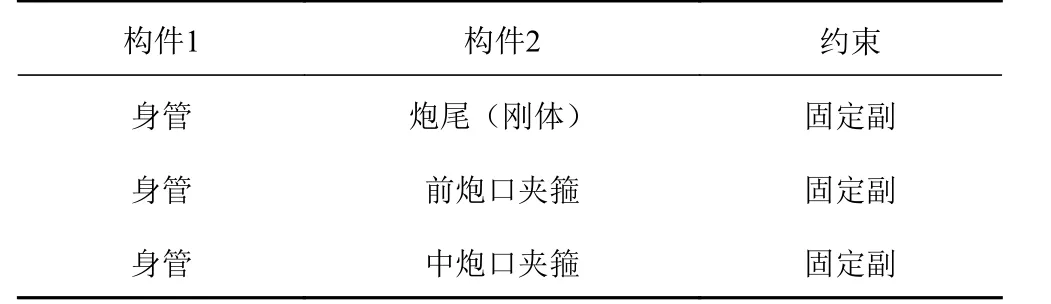
表3 刚体和柔性体约束列表Tab.3 Constraint list of rigid body and flexible body

图8 自动机刚柔耦合虚拟样机模型Fig.8 Virtual prototype model of rigid-flexible coupling of automaton
3 计算结果分析
根据建立的自动机刚柔耦合虚拟样机,分析不同射速下炮口的横向振动位移和纵向振动位移,得出炮口振动随自动机射速的变化规律,为提高航炮的射击精度提供理论支持。由于刚柔耦合模型约束关系复杂、计算量大,故选择航炮理论射速周边的射速进行计算。选择航炮射速5000 发/分、6000 发/分、7000 发/分的计算结果进行讨论。
自动机稳定射击状态下,炮口纵向振动位移最大值随射速的提高明显增加,从5000 发/分到6000 发/分,其纵向振动位移的最大值增加了约60%;从6000 发/分到7000 发/分,其纵向振动位移的最大值增加了约70%。自动机稳定射击状态下,炮口的横向位移值同样随射速的提高出现明显增加,从5000 发/分到6000 发/分,炮口横向位移的最大值增加了约1.2 倍,但其位移值较小可以忽略;从6000 发/分到7000 发/分,其横向位移的最大值增加了约3 倍,虽然横向位移量较小以至于可以忽略,但随着射速的继续增加,其横向位移最大值达到不可忽略的程度,将会对航炮的射击精度造成影响。

图9 不同射速下炮口横向/纵向位移-时间曲线Fig.9 Transverse/longitudinal displacement-time curves of the muzzle at different firing rate
4 结 语
本文运用有限元理论对影响炮口振动的柔性体构件建立模态中性文件和其对应的刚性区域。在动力学仿真软件中得到自动机刚柔耦合虚拟样机模型并进行仿真计算,得到航炮在不同射速下炮口振动位移的变化规律,为航炮射击精度的研究和飞机总体的设计提供理论依据。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
北京航空航天大学学报(2022年7期)2022-08-06
汽车实用技术(2022年10期)2022-06-09
逻辑学研究(2022年1期)2022-03-31
汽车工程师(2021年12期)2022-01-17
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
河南科技(2018年7期)2018-09-10
成长·读写月刊(2018年8期)2018-08-30
智富时代(2018年5期)2018-07-18
