基于工作效率最大化的室内热环境控制方法研究*
2020-12-18 07:44郁文红江超文董娜娜王福林
北方工业大学学报 2020年5期
郁文红 江超文 董娜娜 王福林
(1.北方工业大学土木学院,100144,北京;2.清华大学建筑学院,100084,北京)
人们对于人体舒适性的研究始于1940年代. 很多研究者已经研究了如何将现有的热舒适指标(例如PMV)应用到室内热环境控制中,综合考虑各项环境因素,期望实现舒适的室内环境. 比较常见的室内热环境控制方法有通过楼宇自控系统或用户设定温度值来进行控制. 然而实验结果表明,设定的温度值并不能使室内人员工作效率的最大化,甚至超过50%的温度设定值不符合23.5~27 ℃的夏季温度舒适域范围.[1]由于直接设定温度进行控制存在诸多弊端,研究者们又针对这个问题展开了研究. Marc Fountain等使用模糊控制法,只设有“加热房间”和“冷却房间”两个选项.[2]何伟雄公开了一种人体舒适性感应控制器专利,设有人体移动探测器用于获取人体冷热感知信息,设有微处理器对人体移动探测器输出的感知信息进行计算、判断,然后自动控制空调器的运行.[3]王福林等将室内热环境自动控制方法的发展历程概括为4个阶段:温度设定值控制法、PMV参数控制法、热感觉表达控制法、热感觉预测控制法.[4]Henderson等将设定温度的控制策略改成了设定PMV的控制策略,通过模拟发现在大多数情况下达到了提高室内舒适度和降低空调系统能耗的目的.[5]张良杰等使用以PMV=0为热环境控制的目标,用空调智能控制器进行热环境控制的方法.[6]伍逸文等提出了在不同热环境和光环境下,结合实时反馈信息和群体决策,改善室内环境满意度和节能的环境控制策略,可以改善人的生活环境.[7]
现如今,国内外的研究者们已经意识到,传统设定温湿度控制的方法存在缺陷,正在努力尝试采用其他方法替代,因此笔者提出了基于工作效率最大化的控制系统,同时兼顾舒适度的要求,致力于提供一个更加高效、舒适的工作及学习环境.
1 基于工作效率最大化的控制系统
在该控制系统运行前,首先通过实验测试的方式,得到不同室内热舒适指标(PMV)条件下受试人员的工作效率. 受试人员处于不同PMV的环境中,完成工作效率或休息效率的实测. 该实验数据将作为本控制系统中重要基础性数据,因为室内热环境信息采集相对容易,室内热舒适与工作效率的相关信息需要通过实验取得.
本实验测试选择了比较符合办公室人员工作难度的时钟测试,用于模拟人员在工作状态下的工作效率测试. 笔者使用PEBL软件中的时钟测试用于模拟工作状态,如图1所示. 时钟测试是一种用于实验心理学领域的实验装置,该设备在圆形背景中有一个黑色指针. 指针像秒针那样以单跳(一次一格)的方式移动,大约每秒钟一次,偶尔会进行双跳(一次两格). 被试者的任务是在双跳出现时按下相应的按钮,PEBL软件会记录被试者的错误数与反应时间,用于刻画被测试者的工作效率.
在休息阶段,受试者需要进行闭目养神或进行一些简单的娱乐活动. 被试者在休息时会通过填写调查问卷的方式来汇报自己的休息效果,用以刻画休息效率. 前期信息收集模块收集实验数据并传给智能控制模块进行分析,得到每个被试者工作效率、休息效率为最高效率90%以上时对应的PMV参数,称作高效工作域与高效休息域,作为该系统运行时的目标参数.
记时钟测试中出错数为z、反应时间为t,则正确率x=(500-z)/500(注:500为钟表测试中钟表跳动的总次数),用y=500/t来表示被试者工作的速度,则xy可以反映工作效率的高低.
故工作效率可用以下公式计算表示:
xy=(500-z)/t
(1)
基于工作效率最大化的控制系统组成如图2所示,该系统共分为3个部分:信息收集模块、智能控制模块、末端执行模块.
信息收集模块负责收集多种信息并传递给智能控制模块,信息收集模块分前期信息收集和实时信息收集2部分.
前期信息收集模块收集录入该系统运行前的人员实验测试信息,包括实验时的PMV参数信息、时钟测试的反应时间、时钟测试的错误数、被试者所填问卷答案、以及活动强度等参数. 因此前期信息收集模块需要搭载多种传感器,其中获取PMV参数信息需要搭载空气温度传感器、空气湿度传感器、辐射温度传感器、风速传感器,还需要图像识别系统用于识别被试者的着装以获取服装热阻信息,不仅需要人体动作识别系统自动识别被试者的活动强度以获取代谢率信息,还需要采用人脸识别系统将实验数据储存在对应实验人员的个人资料中.
实时信息收集模块同样搭载空气温度传感器、空气湿度传感器、辐射温度传感器、风速传感器用于确定当前室内的各项环境参数,搭载的人脸识别系统、人体动作识别系统与图像识别系统,用以确定该房间内具体的人员、人员的服装热阻和活动强度. 实时信息收集模块和工位末端执行模块在每一个工位均需要设置,且需要实现“一对一”,并要求系统运行后的实际使用人员要和与前面的实验受测人员保持一致.
智能控制模块用于接收信息收集模块传输的信息,进行信息的分析与处理后智能化选择合适的控制策略并向末端执行模块发送指令. 智能控制模块采用具有自学习功能的BP神经网络算法,通过输入学习样本(包括人员实验测试信息、根据PMV控制策略选择目标PMV所对应的空气参数和所对应设备的运行参数)进行训练,从而实现智能化控制. BP神经网络属于第二代神经网络,目前该算法发展和应用已经比较成熟了. 由于室内环境热舒适性与工作效率属于人员主观感受的范畴,每个人的PMV感受不同,每个人在不同PMV下的工作效率也存在差异性,要实现空调系统的精密化控制很难通过传统的公式定量计算实现,因此采用实测数据并结合BP神经网络算法的智能控制方法是合理的.
智能控制模块在运行之中需要同时完成2项任务. 任务1:获取前期信息收集模块所得的实验信息自动计算每个被试者的高效工作域与高效休息域并存储在每个被试者的资料中. 任务2:获取实时信息收集模块所得的室内人员信息,通过取交集的方式得到每个房间的高效工作域与休息域. 获取实时信息收集模块所得的室内环境参数和人员信息,通过计算得到PMV参数,当PMV参数不在高效工作域或高效休息域的范围内时,会自动选取合适的策略进行调整.
末端执行模块包括风机、风机盘管、辐射吊顶、空气加湿器与空气干燥器,用以接收智能控制模块的指令,控制风机的转速、空调冷冻水调节阀的开度、辐射吊顶调节阀的开度、空气加湿器与空气干燥器的启停,以达到把室内环境参数控制在目标房间高效工作域或高效休息域的范围内.
以湿度调节为例,空气加湿器与空气干燥器的开闭对室内空气湿度的调节方法如图3所示.
2 控制系统运行效果评估分析
通过对文献的分析以及室内热环境对办公室人员工作效率影响的实验部分(见表1)验证可知,对于东方人而言,当环境参数PMV=0时,人体并没有处于最佳热舒适状态,工作效率也没有达到最高. 因此PMV=0这个看似合理的控制目标,但其实并不能带给我们最高效且舒适的工作和生活环境.
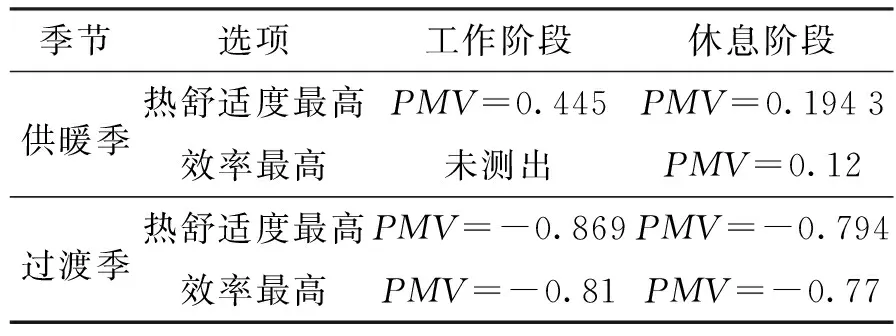
表1 热感觉和效率最高时的PMV参数
本文提出的基于工作效率最大化的控制系统,以工作效率最大化为首要目标,兼顾舒适度的要求. 现使用已有实验数据(采用实验方案改进后的过渡季实验数据,以保证估算结果的准确性)对该系统进行估算,来得出该系统相对于传统的以PMV=0为控制目标的系统,对工作效率、休息效率以及舒适度的提升效果.
2.1 工作效率提升估算
记时钟测试中出错数为z、反应时间为t,则正确率x=(500-z)/500(注:500为钟表测试中钟表跳动的总次数),用y=500/t来表示被试者工作的速度,则xy可以反映工作效率的高低,在室内热环境对办公室人员工作效率影响的实验研究中通过数据分析得到了描述PMV与xy之间关系的二次回归曲线公式,如式(2)所示.
xy=-0.103 3PMV2-0.166 7PMV+1.223 8
(2)
已知过渡季中PMV=-0.81时工作效率最高,该条件下xy=1.29,以PMV=-0.81时的工作效率为100%计算,工作效率可用公式(3)计算:
(3)
不同PMV参数下的工作效率如图4所示.
由图4可知,相对于普通PMV参数控制法所采用的热中性(PMV=0)控制,室内人员的工作效率提高了5.4%.
2.2 休息效率提升估算
根据过渡季实验中被试者进行自我评价得到的问卷数据,实验部分中通过分析得到了描述休息效果r与PMV之间关系的二次回归曲线公式(4):
r=-0.232 4PMV2-0.355 9PMV+4.297 7
(4)
已知过渡季中PMV=-0.77时休息效率最高,该条件下r=4.434,以PMV=-0.77时的工作效率为100%计算,休息效率可用公式(5)计算:
(5)
不同PMV参数下的休息效率如图5所示. 由图5可知,相对于普通PMV参数控制法所采用的热中性(PMV=0)控制,室内人员的休息效率提高了3.17%.
2.3 工作阶段舒适度提升估算
根据过渡季实验中被试者进行自我评价得到的问卷数据,将问卷中所得热舒适评价m(1非常舒适、2舒适、3有点不舒适、4不舒适、5非常不舒适、6无法忍受)转化为百分制指标s,其转化公式(6)为:
s=[(6-m)/6]×100
(6)
使用百分制的被试者舒适度指标描述被试者在工作阶段不同PMV工况下的平均热舒适,如图6所示.
由图6中的数据进行二次回归分析,经二次回归分析,得到工作阶段被试者舒适度指标s(百分制)与PMV工况之间的关系为公式(7):
s=-4.797 1PMV2-8.279 7PMV+60.265
(7)
根据实验部分可知,基于工作效率最大化的室内环境控制系统会在PMV=-0.81的工况下运行,此时被试者舒适度指标s=63.84,而普通PMV参数控制法在PMV=0的工况下运行,对应的被试者舒适度指标s=60.27.
由此可得在工作阶段下,本文的控制方法相对于普通PMV参数控制法所采用的热中性(PMV=0)控制,室内人员的舒适度约提高了5.92%.
2.4 休息阶段舒适度提升估算
根据过渡季实验中被试者进行自我评价得到的问卷数据,使用百分制描述被试者在休息阶段不同PMV工况下的平均热舒适,如图7所示.
由图7中的数据进行二次回归分析,经二次回归分析,得到休息阶段被试者舒适度指标s(百分制)与PMV工况之间的关系式(8)为:
s=-5.405 7PMV2-8.584 6PMV+60.672
(8)
根据实验部分可知,基于工作效率最大化的室内环境控制系统会在PMV=-0.77的工况下运行,此时被试者舒适度指标s=64.08,而普通PMV参数控制法在PMV=0的工况下运行,对应的被试者舒适度指标s=60.672.
由此可得在休息阶段下,本文的控制方法相对于普通PMV参数控制法所采用的热中性(PMV=0)控制,室内人员的舒适度约提高了5.62%.
3 本文小结
本文提出了基于工作效率最大化的控制方法,并对其运行结果进行了估算和评价. 该系统以室内人员工作效率、休息效率最大化为目标,以PMV值为控制参数进行室内环境控制,兼顾舒适度的要求. 该控制系统主要由信息收集模块、智能控制模块与末端执行模块组成,能够实现室内热环境的智能化调控,为人们提供一个更加高效、舒适的工作及学习环境.
通过对该系统运行效果的估算发现,相对于传统的基于PMV指标的控制系统,该系统下室内人员的工作效率约提高5.4%,休息效率约提高3.17%,工作阶段舒适度约提高5.92%,休息阶段舒适度约提高5.62%. 该系统不仅提高了室内人员的工作效率、休息效率,还为室内人员提供了更舒适的环境.
猜你喜欢
建材发展导向(2022年3期)2022-04-19
家庭影院技术(2021年10期)2021-11-20
纺织科学研究(2021年9期)2021-10-14
数学大王·中高年级(2021年6期)2021-09-27
现代临床医学(2021年4期)2021-07-31
共产党员(辽宁)(2019年7期)2019-11-18
共产党员·上(2019年4期)2019-04-26
环球时报(2017-08-18)2017-08-18
大学生(2017年3期)2017-03-21
奥秘(2016年3期)2016-03-23