不同触地模式慢跑的足踝有限元分析
2020-12-17 04:11:04常桐博牛文鑫张胜年
上海体育学院学报 2020年12期
常桐博,李 岩,牛文鑫,张胜年
(1.上海体育学院运动科学学院,上海200438;2.甘肃中医药大学体育健康学院,甘肃兰州730000;3.上海市养志康复医院,上海201619;4.同济大学医学院,上海200092)
作为人体下肢运动链的末端结构,足和踝关节在跑步中为人体提供稳定支点的同时,也承受着来自地面的剧烈冲击及由此产生的较高运动伤害风险。长跑流行病学有关调查资料[1]表明,长距离跑动中下肢损伤的总体发生率介于19.4%~79.3%,其中足、踝(包括足趾)的伤害发生率介于5.7%~39.3%。亦有研究[2-4]表明,长距离跑中的足、踝损伤在很大程度上与跑动的触地模式有关。生物力学研究[3-5]表明,后足触地(rearfoot strike,RFS)跑较之于非后足触地(nonrearfoot strike,NRFS)跑承受了更大的冲击载荷,而NRFS 在有效衰减地面冲击力的同时,由于足部的触地姿态影响,更易导致踝关节扭伤和足底较高的筋膜张力[6-7]。上述结论在更大程度上是基于运动学、动力学的一般测试和解剖学结构分析得出的。足部由26 块骨借韧带、肌肉组合而成,触地过程中的冲击力必然会引起足踝内各组织结构的交互作用与影响,而这种交互作用正是深入认识运动中足、踝损伤的重要因素。目前,尚未见对跑动时在不同触地模式下足踝内结构应力及应力分布特征的相关报道。
本文通过获取足踝CT 影像,建立包括骨、软骨、韧带及软组织等在内的三维有限元模型,并予以验证。利用三维运动捕捉系统及测力台获取不同触地模式下完整支撑相的运动学和动力学数据,作为有限元分析的载荷和边界条件。对足踝结构在RFS、NRFS 模式下某些特征时刻进行有限元仿真计算,以探讨在不同触地模式下的足踝内部应力及应力分布特征,为深入探讨不同触地模式的生物力学特征及运动损伤的理论知识提供基础。
1 研究对象与方法
1.1 研究对象
选取 8 名男青年[年龄:(23.3±0.6)岁,身高:(176.7±1.5)cm,体质量:(76.0±5.3)kg],健康无疾病,近6个月内无下肢损伤,足形态正常,临床检查未见踝关节活动受限,经常从事健身跑运动(>20 km/周)[6]。完成不同触地慢跑的适应训练后,签署知情同意书。
1.2 研究方法
1.2.1 运动学和动力学测试
运动学数据采集:采用VICON 三维动作捕捉系统(VICON MX,Oxford Metrics,英国产),共 10 台VICON MX-40 红外摄像机,采样频率200 Hz。动力学数据采集:同步使用相邻2 块嵌于水平地面的Kistler 三维测力台(Kistler 9287B,Corporation,瑞士产),采集频率1 000 Hz。要求研究对象完成速度为3 m/s[8]的 RFS 和 NRFS 慢跑各 3 组,跑速利用 Witty-Manual光栅测量。在限定速度下,右足触地至整个支撑相落在任意、独立1块测力台上视为1组有效数据,取最接近要求跑速的1组数据进行分析。
使用Visual 3D v3(C-Motion Inc.,美国产)分析运动学和动力学数据,以右足踏上测力台[以垂直方向最大垂直地反力(ground reaction force,GRF)连续10帧大于10 N为标志]至离开测力台为1个完整右侧支撑相。触地方式的最终判定以触地角(foot strike angle,FSA)为 标 准 :FSA≥8° 为 RFS,FSA<8° 为NRFS[9],触地角采用第一跖骨头和跟骨 mark 点的连线与实验室坐标系中前后水平轴的矢量角。经上述处理后的踝关节角度、FSA和GRF分别被作为足踝有限元分析的边界条件和载荷。
1.2.2 有限元建模及分析
(1)足踝有限元建模。有限元模型建模使用的足踝CT 影像来自1名正常男性志愿者(年龄28岁,身高175 cm,体质量65 kg)。采取仰卧位,石膏固定足至非承重的中立位,使用Light Speed 16 排螺旋CT(GE,US)实施断层扫描,层厚为0.625 mm,共获得扫描图片300 张。将扫描的同一序列图片保存为DICOM格式文件。
将DICOM 格式文件导入Mimics 17.0,采用图像灰度阈值分割(threshold segmentation)的方式生成三维实体模型。三维实体模型在逆向工程软件Geomagic Studio 12.0(Geomagic,Inc.,USA)中计算生成包含胫骨、腓骨和足部骨在内的共28块骨骼的几何模型。
20世纪90年代中期之后,随着经济社会发展和科技进步,电脑、VCD和家庭影院迅速进入广州的百姓家庭,使人们的精神文化生活又一次发生空前变化,大众文化娱乐消费得到广泛普及并显著扩张。广州出现了全国有名的海印电器城和广州电脑城,出现了制作新式影像的广州影像出版社和全国最大的太平洋影音公司。广东音像城,作为全国最大的音像制品批发市场,见证了一大批音像民营企业的崛起,承载着许多音像人期待把产业做大做强的梦想。
在有限元分析软件Abaqus 6.14(Dassult Systems Simulia Corp.,USA)中划分网格和建立模型,网格类型选用2 mm 的正四面体单元。建立的三维足踝有限元模型包括足的28 块骨、72 条足部韧带、足底筋膜及封装于外部的软组织。为简化模型复杂程度,模型中所有骨、韧带及软骨组织的材料都理想化为均匀、各向同性的弹性材料[10-14]。每组骨的关节面之间均定义接触行为,软骨厚度根据已知的文献报道[11,15]设定。各种组织的材料属性及单元类型见表1。
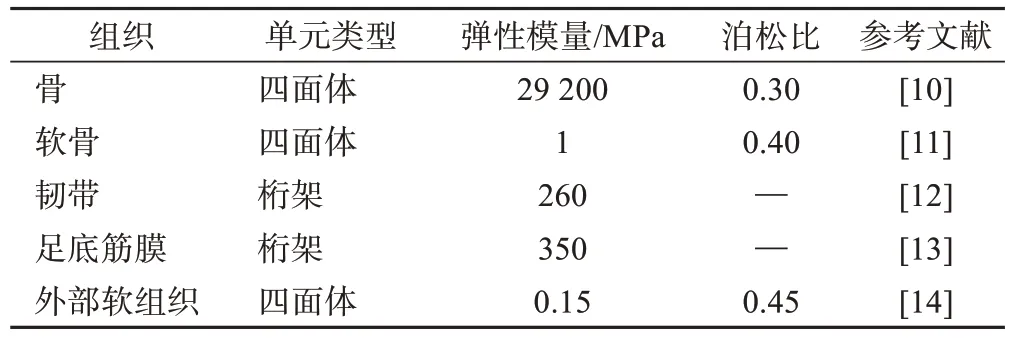
表1 各种组织的材料属性与单元类型Table1 Material properties and element types of the finite element model
韧带和足底筋膜被视为承受拉力载荷而不受压缩的材料,外部软组织被定义为弹性材料。足踝韧带和足底筋膜使用桁架梁单元连接,使用5 条等力的向量等效于1 条跟腱的拉力。为模拟足和脚踝在慢跑中支撑相的状态,在模型中建立1 块硬质材料的地板,并赋予其材料属性。足与地面之间设立接触行为,摩擦系数设置为0.6[15],足踝有限元模型与加载见图1。
(2)模型验证。验证1:限制足踝模型跖骨远端和足跟的3 个位移自由度,在胫骨上方垂直向下施加600 N 的力,将足踝有限元模型计算出的距上关节面接触应力与文献[16]中通过Tekscan 压力传感技术测量出的距上关节面接触应力分布和数值水平进行比较。本文建立模型计算得到的距骨上关节面软骨最大和平均接触应力分别为4.12 MPa和2.35 MPa,文献[16]的离体试验结果分别为3.69 MPa和1.96 MPa,模型和文献[16]中距上关节面的接触应力分布趋势相近(图2)。
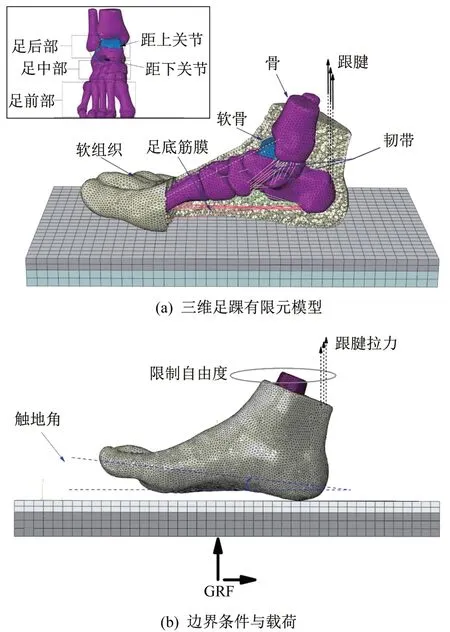
图1 足踝有限元模型与加载Figure 1 Finite element model of foot-ankle complex and loading conditions for the simulation
验证2:通过350 N 力的加载,模拟双脚自然站立,本文建立模型的足底压力分布趋势与引用研究的相同。验证引用研究有限元模拟的峰值压力是0.36 MPa,足底压力测试结果峰值为0.17 MPa,足底压力峰值都出现在足跟区域[17]。本文有限元模拟在350 N 地反力下,足底压力峰值为0.18 MPa,同样分布于足跟下方(图3)。
综上,本文建立的三维足踝有限元模型是有效的。
(3)边界条件与载荷。选取1 名志愿者的动力学和运动学数据进行有限元模拟,该志愿者踝关节角度在样本(n=8)平均值1 倍标准差范围内。由于研究中动力学数据的采集使用了更高的采样频率,为保证时刻划分准确,有限元分析的加载时刻通过GRF 的曲线特征结合膝关节角度变化选取。分别选取 RFS 和 NRFS 中 a、b、c、d、e 5 个时刻代表触地过程中的冲击、缓冲和蹬伸进行有限元分析。如图4所示:a 时刻为RFS 垂直GRF 的第一峰值时刻,代表RFS 时足踝受到冲击的时刻;b、d 时刻分别为 RFS 和NRFS 的缓冲最低点;c、e 时刻分别为 RFS 和 NRFS的蹬伸最大垂直GRF 时刻。其中,边界条件为限制模型中胫骨、腓骨上端的6 个自由度,载荷为施加GRF 从模型地板下方向足部压力中心点位置施加,跟腱力以集中力的形式施加在跟骨结节上方(图1)。
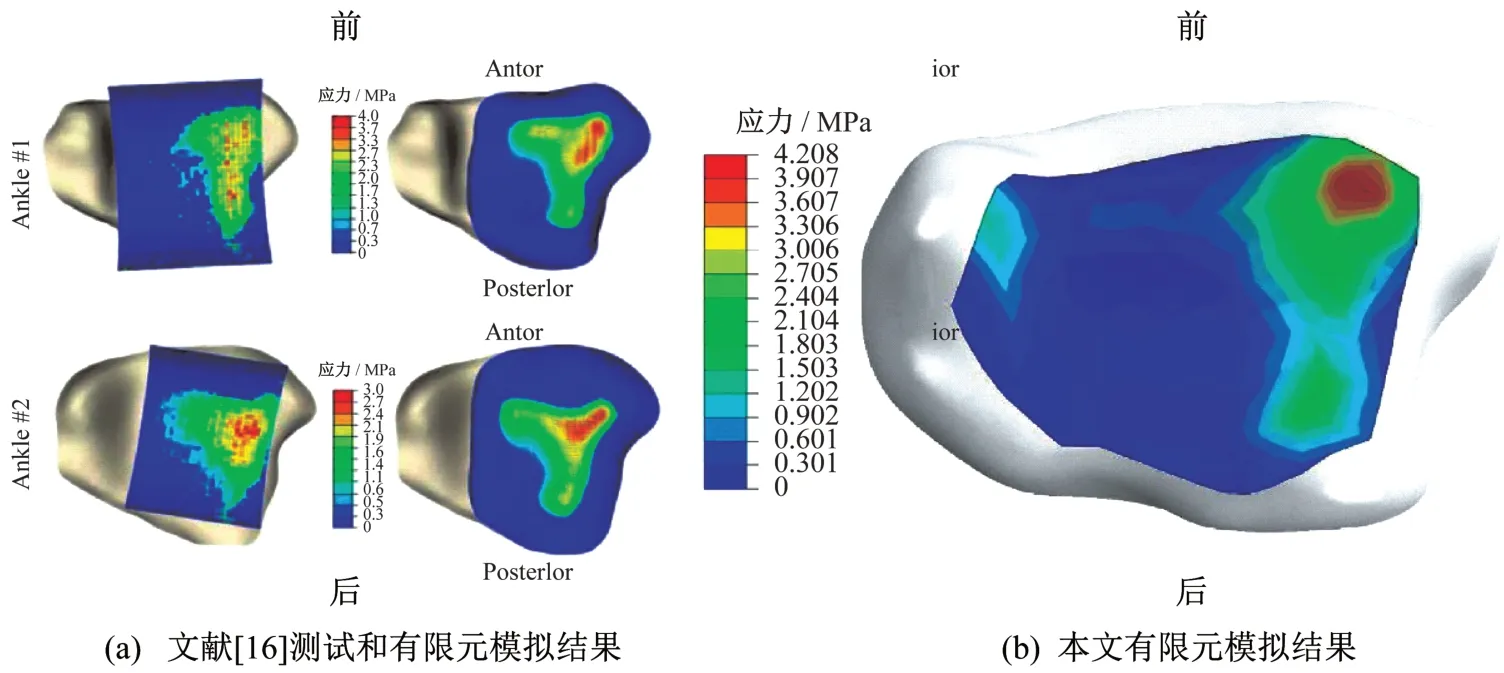
图2 胫骨下关节面接触应力有限元模型验证Figure 2 Distribution of contact stress in the inferior surface of tibia for finite element model validation
(4)有限元分析计算。边界条件与载荷设定完成后,对各个状态下足踝有限元模型进行计算,在Abaqus 6.14 软件中采用通用静力学算法完成。计算完成后提取计算结果中骨结构的米塞斯(Von Mises)应力,关节面软骨和足底软组织的接触应力以及韧带、足底筋膜truss单元上的拉力进行分析。
2 结果与讨论
2.1 距上关节面软骨接触应力
距上关节面软骨上的接触应力分布总体趋势呈现外、后侧高于前、内侧的分布规律。其中:关节软骨面最大接触应力出现在NRFS 的缓冲最低点(d 时刻),接触应力峰值为7.41 MPa;在RFS 模式的冲击时刻(a 时刻),距上关节面软骨接触应力最小,峰值为2.47 MPa;NRFS的缓冲最低点(d时刻)距上关节接触应力分布较其他时刻更靠近关节面的前部区域。距上关节面软骨接触应力及分布见图5。
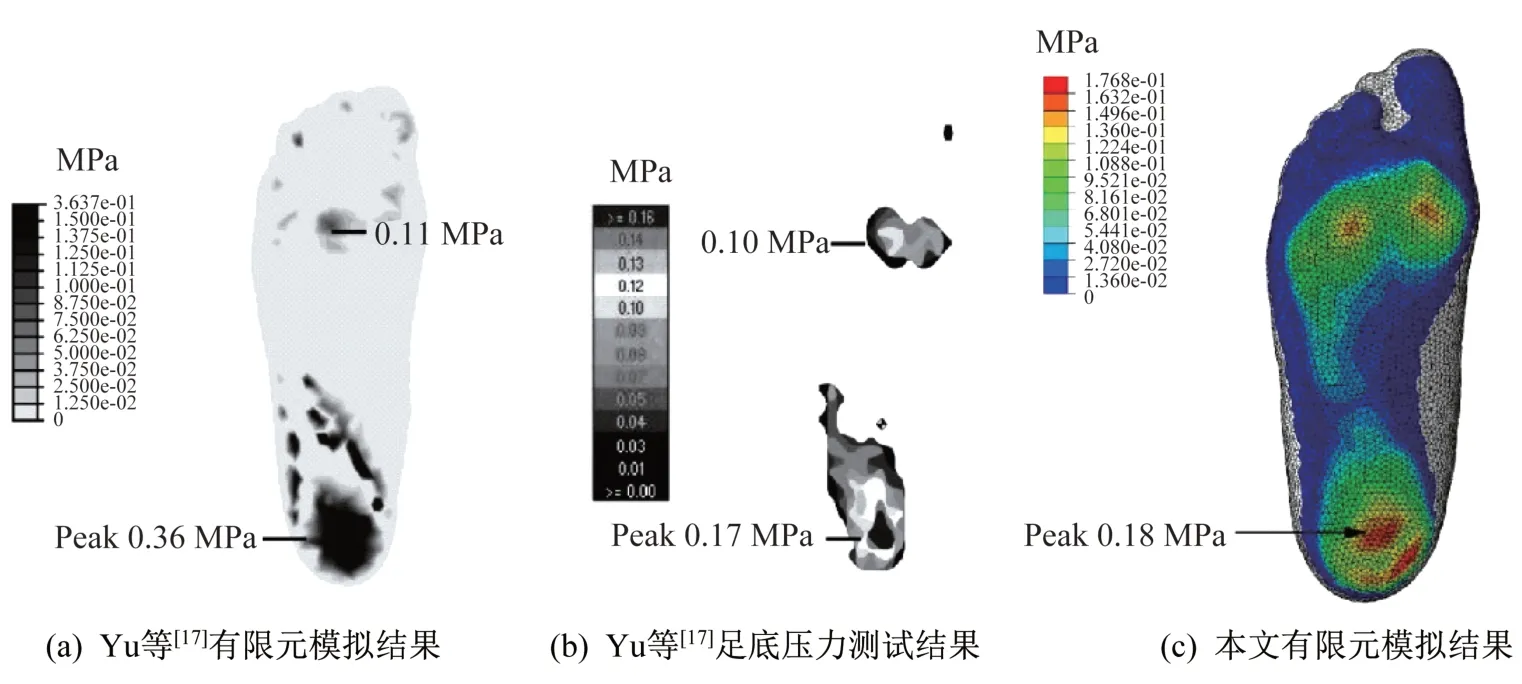
图3 足底压力分布验证Figure 3 Verification of plantar pressure distribution
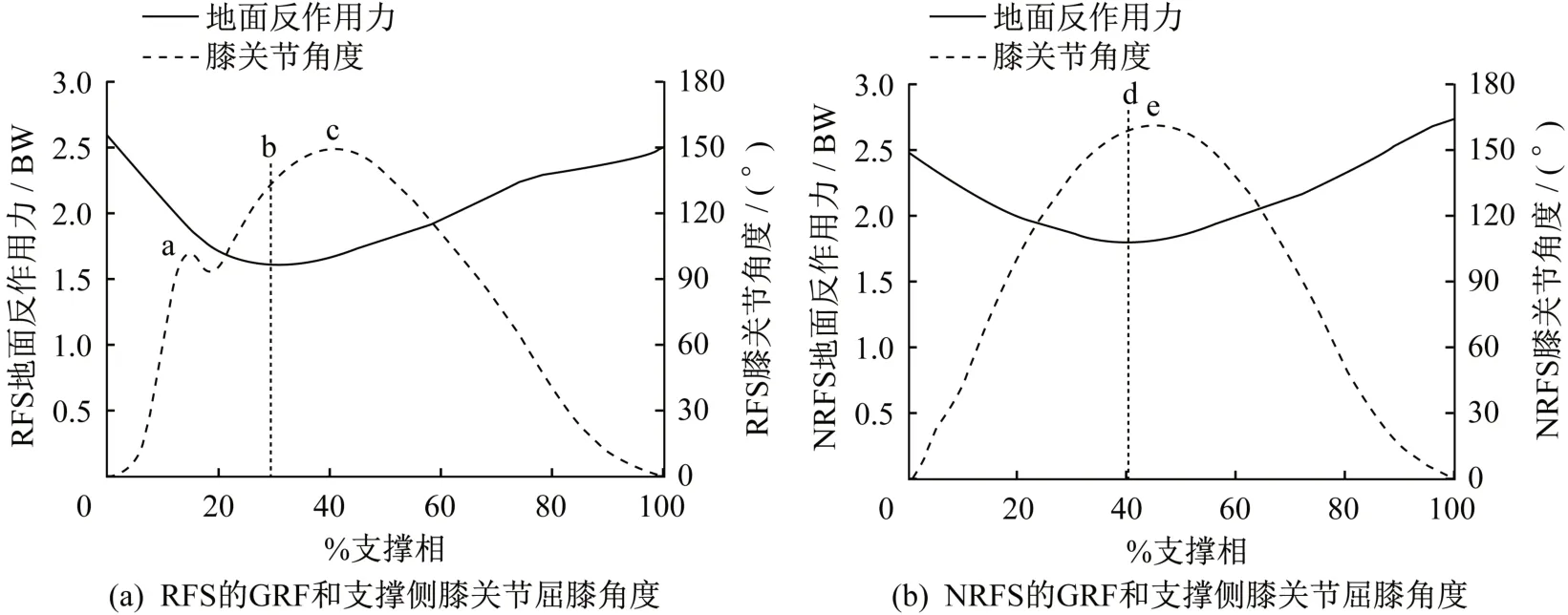
图4 有限元分析选取的时刻Figure 4 The selected instants for finite element analysis
2种触地模式下距上关节面软骨上接触应力的分布特征相近,并未出现过大的应力峰值和过于集中的应力分布区域。在RFS 模式的冲击时刻,由于此时刻所受地面的反作用力较小,距上关节面软骨也未发现过大的应力峰值和过于集中的应力分布区域,峰值大小是人体静态站立时距上关节面软骨接触应力的1倍左右。无论是RFS还是NRFS,关节面软骨上较为均匀的应力分布主要依赖于距上关节较为良好的解剖学环境。相比于其他类型关节,距上关节软骨面较为平整[18]。距骨在踝穴中主要围绕冠状轴、在矢状面上产生运动,很少产生关节的非生理运动。而在2 种触地模式中,接触应力在距骨上关节面分布的变化也仅由不同踝关节角度下,胫骨和距骨相对位置的变化引起。因此,距上关节面软骨良好的解剖学环境使得该关节软骨能承载慢跑中不同触地模式对其产生的载荷。
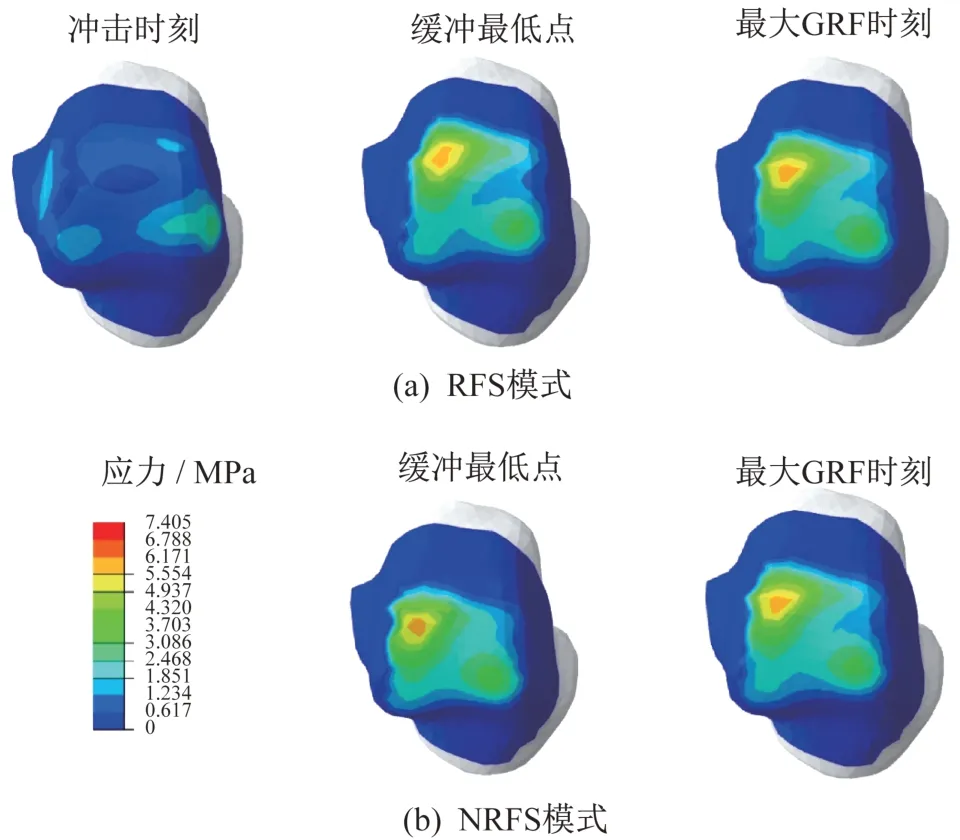
图5 距上关节面软骨接触应力Figure 5 Distribution and levels of contact stress on the talocrural joint
2.2 足底韧带和足底筋膜受力
NRFS 中各时刻足底筋膜、楔舟足底韧带和弹簧韧带受力大于RFS。足底筋膜受到拉力的最大值出现在NRFS的缓冲最低点即d时刻(表2)。这与NRFS模式下腓肠肌激活程度高从而提高了跟腱对足跟向上的拉力有关[19],足踝生物力学中常见的桁锁模型亦可印证该现象。另外,在NRFS 模式下跟骨结节附近的应力增大也能证实跟腱对足跟向上拉力作用的增加,这可能是足底筋膜拉力增大的诱因之一。足底筋膜受到拉力的最大值出现在NRFS 的缓冲最低点(d时刻),这与距上关节面应力结果呈现了相似的规律,即也发生在该时刻,而不是出现在2 种模式的最大垂直地反力时刻。可以推测,在慢跑触地过程中,足踝姿态对足底筋膜拉力的影响大于足踝受到外加载荷对它的影响。因此,足底筋膜在NRFS 的缓冲最低点受到的较大拉力在更大程度上来自足的跖屈和较小的足触地角度。对在NRFS模式下足底筋膜的受力升高现象应予以重视,足底筋膜炎是临床常见的足跟疼痛的诱因,长期采用或突然将触地模式改为NRFS 可能会诱发足跟疼痛。
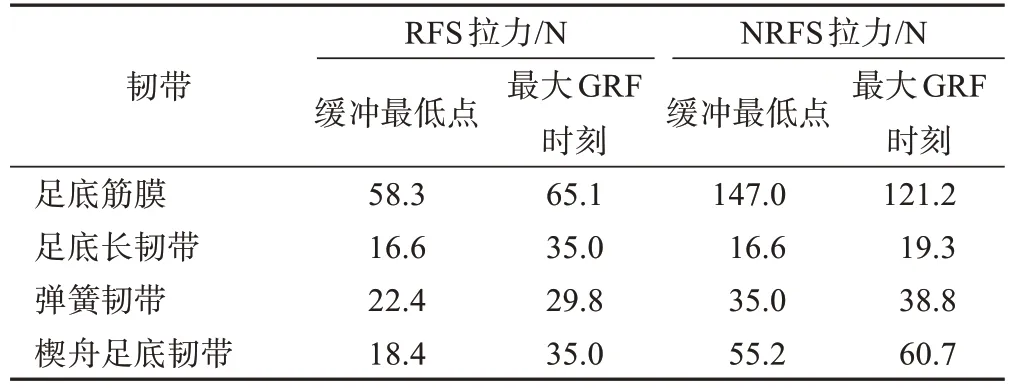
表2 足底筋膜和韧带受到的拉力Table 2 Tension of the plantar fasica and ligaments of foot
2.3 足底压力分布
在如图6所示的2种模式下,各个时刻足底压力的峰值水平接近,分布区域呈现不同的特征。在RFS的冲击时刻(a时刻),足底压力峰值分布于足底的足跟后方区域,为0.45 MPa。无论是RFS还是NRFS,最大垂直GRF时刻即蹬地时,足底压力的较大应力集中区域都出现在前脚掌部位,在2种触地模式下足底压力的峰值都出现在最大垂直GRF时刻,且NRFS中数值较大(e时刻),为0.47 MPa。比较2种模式缓冲最低点(b和d时刻),NRFS的较高压力分布区域比RFS更靠近足底的前掌和外侧区域。本文与已有研究[3-5]结果均显示,RFS对足跟部冲击较大,虽然足底脂肪垫具备缓冲作用,但过大负荷和长期反复地加载、卸载可能会增大足跟部组织损伤的风险。足底压力分布变化的规律为:RFS时较大应力区域从内后侧足跟部向前外侧脚掌移动至离开地面,而NRFS时较大应力从前脚掌轻微向后移动再向前外侧移动直至离地。足底压力变化主要受到跑步支撑项过程中人体压力中心、足与地面相对姿态变化的影响,因而呈现上述规律。

图6 不同触地模式足底压力分布Figure 6 The features of insole pressure distribution in different strike patterns
2.4 中足骨应力分布
本文中第1主应力体现主应力方向的最大拉应力,第3主应力反映最大压应力。在2种触地模式下,Von Mises应力和第1主应力的峰值都出现在楔舟间的关节面处。RFS和NRFS的缓冲最低点(b、d时刻)第1主应力最大峰值均出现在舟骨,在RFS缓冲最低点(b时刻)该现象更明显。中足应力分布见图7、图8。
由于足舟骨需同时将载荷向前传递给3 块楔形骨,其所处位置和功能导致了对其不利的力学环境。3 块楔形骨与足舟骨相连,一旦其中1 块与舟骨之间出现过大载荷,舟骨会在杠杆原理的作用下与其他楔形骨之间产生挤压导致应力集中和增大。因此,应重视舟骨在触地动作引起外加载荷下的生物力学响应。
根据本文中舟骨Von Mies 应力、第1 主应力和第3 主应力分布可以判断:舟骨在纵向上受到来自楔形骨和距骨的压力,在横向上受到拉应力的作用。因此,在足舟骨与楔形骨关节面处出现的较大Von Mies应力,在更大程度上是因为第1 主应力值的增大。第1 主应力代表主应力方向的最大拉应力[20],舟骨上出现的较大第1 主应力提示舟骨在主应力方向上受到较大的拉应力,该现象在RFS 模式的缓冲最低点(b时刻)最为明显。松质骨的材料特性体现为抗压缩能力大于抗拉伸能力。因此,足舟骨在RFS 模式的缓冲最低点(b 时刻),其力学结构的不良性可能严重于其他模式、时刻,存在一定程度的风险。本文也存在一定局限:有限元模型加载时只考虑GRF和跟腱拉力作用,忽略了其他较小量级的肌肉力;研究对象均为男性,在进一步研究中研究对象的性别比例有待优化。
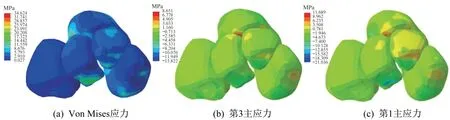
图7 RFS缓冲最低点中足骨应力结果云图Figure 7 Stress distribution and levels on the mid-foot bone in Max-buffer instant of RFS
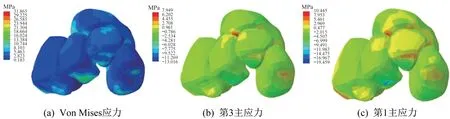
图8 NRFS缓冲最低点中足骨应力结果云图Figure 8 Stress distribution and levels on the mid-foot bone in Max-buffer instant of NRFS
3 结论与建议
在2 种触地模式下,距上关节面软骨上接触应力较为均匀,其良好的解剖学环境使得该关节软骨面能承载慢跑时不同触地模式产生的载荷。RFS 下冲击地面时足跟部位组织集中承受了较大压应力。相比于NRFS 和其他时刻,足舟骨在RFS 缓冲最低点(b 时刻)所处力学环境更差。NRFS 中,足底筋膜、楔舟足底韧带和弹簧韧带的受力大于RFS模式。
建议:存在足底筋膜炎症状人群不宜采取NRFS的跑步方式;长期的RFS 模式可能提高舟骨和足跟处的损伤风险;慢跑练习者尝试陌生的触地模式应注意循序渐进,做好运动伤害的预防工作。
作者贡献声明:
常桐博:设计论文框架,分析试验数据,撰写、修改论文;
李 岩:采集数据,验证结果;
牛文鑫:指导修改论文;
张胜年:设计论文框架,指导修改论文。
猜你喜欢
船海工程(2023年2期)2023-04-27 13:07:20
青年文摘(2022年13期)2022-12-07 15:23:57
实用手外科杂志(2022年2期)2022-08-31 09:47:38
实用手外科杂志(2022年2期)2022-08-31 09:47:16
临床骨科杂志(2021年4期)2021-08-20 02:04:14
体育时空·上半月(2017年4期)2017-05-05 03:08:39
东西南北(2017年1期)2017-02-22 18:26:24
实用手外科杂志(2015年3期)2015-08-27 01:53:22
实用手外科杂志(2015年1期)2015-08-27 01:52:16
中华骨与关节外科杂志(2014年4期)2014-04-08 02:55:54