山区公路弯道小型车辆的比功率分布特征研究*
2020-12-17 02:55:28黄颖铭刘丹丹陈金山郭建钢
武汉理工大学学报(交通科学与工程版) 2020年6期
黄颖铭 刘丹丹 陈金山 郭建钢 李 林
(福建农林大学交通与土木工程学院 福州 350002)
0 引 言
机动车比功率(vehicle specific power,VSP)指的是单位质量下机动车的瞬时功率,单位为kW/t,由Palacios等首次提出[1].相较于其他的机动车行驶参数而言,VSP更容易获取且接近实际情况.许多专家学者对此做出了大量研究,已采用VSP来刻画机动车的运行状态和能耗测算的影响[2-3].美国环保署EPA发布了基于VSP的油耗排放计算模型MOVES2014,利用VSP来描述车辆不同运行工况,从而建立宏观交通参数与微观油耗之间的关系[4-5];Zang等[6]提出一种基于机动车比功率分布的生态驾驶行为评价方法,表明个体驾驶员的VSP分布与基本分布的差异可用来识别生态驾驶行为,并在不同的车速范围内,其生态驾驶行为一致;王敏等[7]着重研究介于低速与高速两者之间的VSP分布,表明高速区间下VSP分布接近于正态分布;雒文鹏[8]提出车型混合比的概念,建立高速公路混合交通流比功率及比功模型;冯红晶[9]对商用车的VSP参数进行标定,得出不同轴型货车及客车的VSP计算模型.
美国环保署EPA与国内外研究学者们对不同车型、不同速度区间和不同道路等级下比功率的相关研究十分成熟,但对弯道、信号控制交叉口、公交车站等特殊路段的研究较少.为此,选取福州市森林公园至鼓岭道路的6个弯道作为研究对象,采用无人机实地航空摄影,利用Tracker软件获取车辆行驶数据,聚类分析小型车弯道处不同平均行程速度区间下的VSP分布特征,量化VSP在弯道处的变化趋势,拟合小型车VSP、平均行程速度和断面位置的三维关系,有助于更好地理解山区弯道VSP的分布特征.
1 研究方法
1.1 研究对象
以福州市森林公园经宦溪至鼓岭景区道路的6 个弯道为研究对象.限于篇幅,选取其中一个弯道(K17+477.003)说明,其几何参数从竣工图获取,见表1.该路段为典型的山区道路,双向两车道,设计速度为20 km/h,根据实地调查,交通流主要为小型车辆.

表1 弯道(K17+477.003)参数信息
1.2 VSP数据获取
为获取小型车自然行驶状态下的参数,采用无人机进行航空摄影,获得1 080 P,25帧/s的超高清视频.选择旅游淡季进行调查,以降低车辆跟驰行驶和对向车辆所造成的影响,摄像时段为09:00—11:00.
使用Tracker软件对过弯车辆进行自动跟踪,将视频导入并设置视频播放帧数为15帧,即0.6 s读取1次数据[10].定义弯道起点为坐标原点,利用质点跟踪功能,选取车辆的一个固定特征点进行跟踪,获取自然行驶车辆的速度、加速度和断面位置.将弯道外侧的行车方向定义上行,弯道内侧的行车方向定义为下行.根据统计学最小样本量的要求(上下行各为61辆),因此采集了上下行样本量各70辆[11].
1) 速度计算 通过Tracker软件得到间隔15帧,3个固定特征点的坐标,记为(x1,y1),(x2,,y2),(x3,y3),则速度v1,v2的计算为
(1)
(2)
2) 加速度计算 加速度a的计算为
a=(v2-v1)/Δt
(3)
3)VSP计算 由于小型车的各种相关参数取值范围较小,故而公式较为统一,VSP为
VSP=v[1.1a+9.81grand(%)+0.132]+
0.000 302v3
(4)
式中:v为瞬时速度,m/s;a为加速度,m/s2;grand为道路坡度,%.
1.3 VSP聚类分析
为了便于分析,对弯道处所得的VSP进行聚类[12].对通过弯道的每一辆车辆的瞬时速度求取平均,得到车辆过弯的平均行程速度,波动范围在20~50 km/h,以10 km/h的行驶速度对机动车平均行程速度进行区间划分,上行VSP的波动范围在-28~28 kW/t,下行VSP的波动范围在-16~20 kW/t,以2 kW/t的步长对不同速度区间下的VSP进行划分.VSP区间划分,见表2.
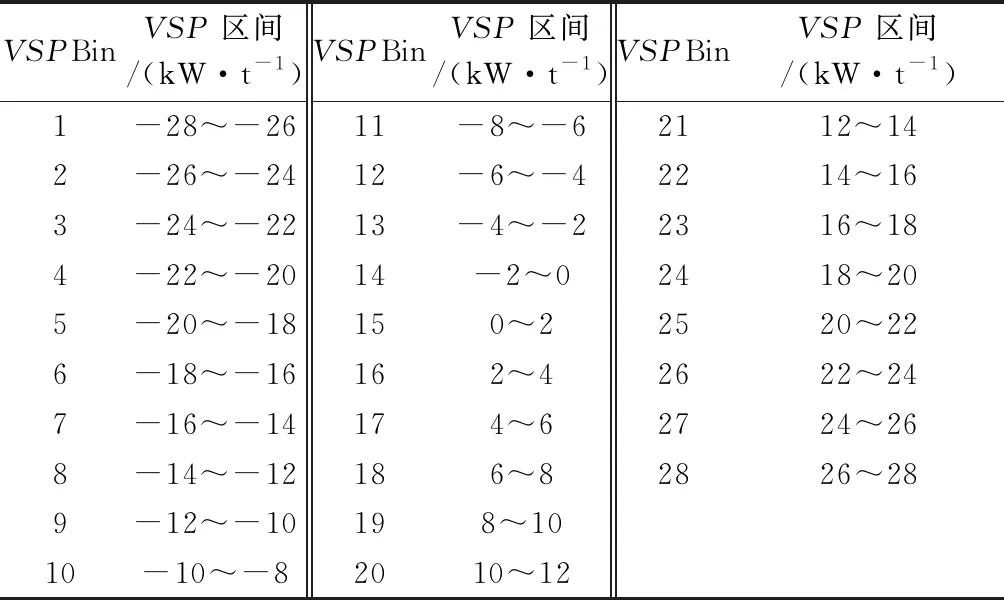
表2 VSP区间划分
2 结果与分析
2.1 VSP分布特性分析
VSP分布率为不同平均速度区间下VSP的个数占该VSP总数的比重.分上行和下行统计不同行程速度区间各VSP区间的分布率,见图1.

图1 上下行车辆在不同速度区间下的VSP分布图
从图1可以看出,车辆在上下行车辆在不同速度区间内的VSP分布特征.
1) 上下行车辆在不同平均行程速度区间下,其VSP分布均接近正态分布,在20~30 km/h的速度区间下,正态性最显著,且随着速度区间值的变小,VSP的波动范围变小,更加聚集分布在某一VSP区间范围内.
2) 在速度为40~50 km/h的区间下,VSP波动范围较大,上下行车辆的VSP均出现两个波峰,上行车辆的VSP主要分布在0~2 kW/t和14~16 kW/t,下行车辆的VSP主要分布在-2~0 kW/t和8~10 kW/t.
3) 速度为30~40 km/h的区间下,上行车辆的VSP主要分布在8~10 kW/t,下行车辆的VSP主要分布在-2~0 kW/t;在速度20~30 km/h的速度区间下,上行车辆的VSP主要分布在6~8 kW/t,下行车辆的VSP主要分布在0~2 kW/t.
2.2 不同断面位置VSP规律分析
上下行车辆各断面位置与相对应的VSP采用三次多项式拟合,可得该弯道上下行车辆VSP变化曲线图,见图2.

图2 上下行车辆-VSP变化曲线图
由图2可知,上行车辆在断面位置-VSP的变化曲线中,VSP大致趋势随着断面位置的增大而增大,VSP从负区间变为正区间,下行车辆的变化曲线刚好相反,VSP大致趋势随着断面位置的增大而减小,VSP从正区间变为负区间.
采用Getdata软件对车辆在该弯道上下行VSP的变化趋势进行量化,以5 m为单位对上下行车辆VSP变化曲线图取值,并求取平均,添加趋势线,可得上下行车辆平均VSP变化曲线图,见图3.
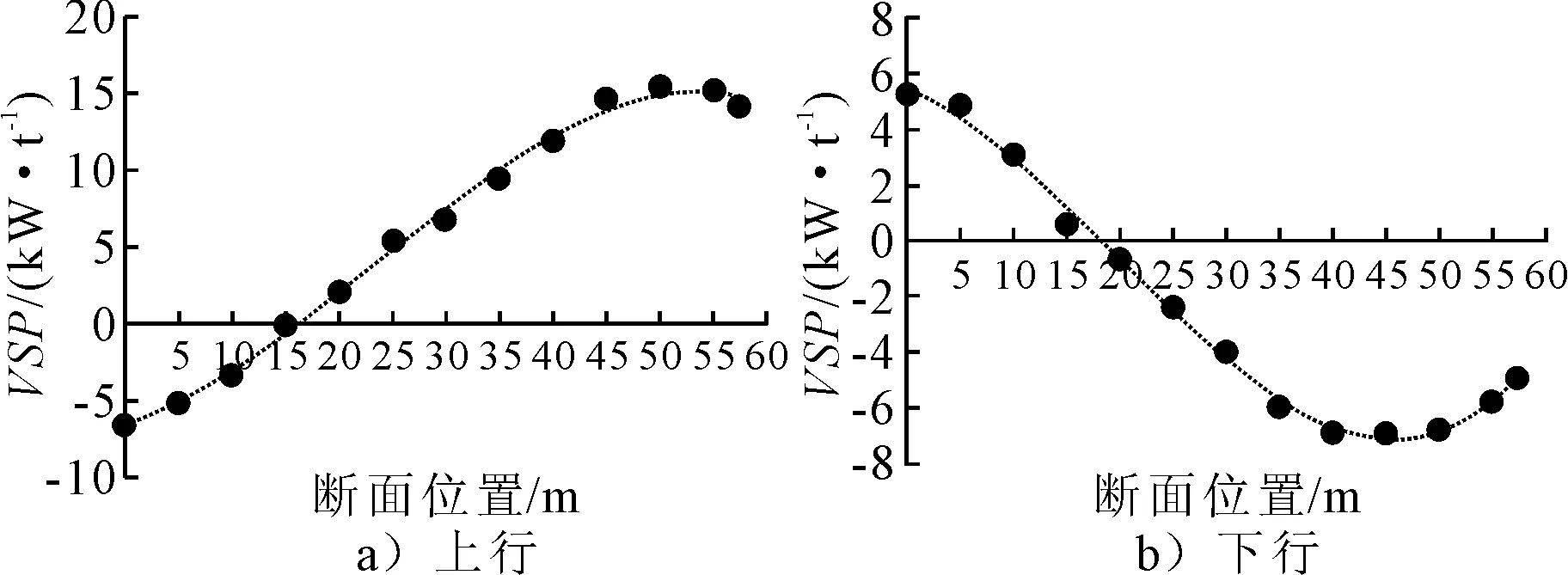
图3 上下行车辆VSP平均变化曲线图
对上下行车辆进行拟合,可得车辆VSP平均变化曲线函数,为
上行:y=-0.000 2x3+0.015x2+0.211 9x-
6.489,R2=0.996
(5)
下行:y=0.000 2x3-0.011x2-0.162 5x+
5.503,R2=0.996
(6)
式中:y为VSP,kW/t;x为断面位置,m.
由图3可知,上行车辆于断面位置约16.1 m处VSP由负转正,下行车辆约18.4 m处VSP由正转负,上下行零点的断面位置大致相当.可将曲线的变化原因归为,上行入弯时,先刹车减速,后由于车辆爬坡,VSP呈增长趋势,并于约16 m处,车辆开始加速;下行入弯时由于坡度、惯性,车辆下坡加速,后由于刹车制动,VSP呈下降趋势,并于约18 m处,车辆处于减速状态.
2.3 弯道VSP曲线拟合
使用matlab的curve fitting工具箱拟合平均行程速度、断面位置和VSP的关系,VSP与平均行程速度的关系满足一次多项式,VSP与断面位置的关系满足三次多项式,上下行关系拟合三维图,见图4.
上行车辆拟合的模型,为
f(x,v)=15.66-1.146x-0.598 5v+
0.022 98x2+0.040 61xv-0.000 155 6x3-
0.000 38x2v,R2=0.685 8
(7)
下行车辆拟合的模型为,为
f(x,v)=-9.286+0.694 4x+0.418 1v-
0.019 84x2-0.024 76xv+0.000 175 7x3+
0.000 278 7x2v,R2=0.612 3
(8)
式中:f(x,v)为VSP,kW/t;x为断面位置,m;v为速度,km/h.
由图4可知,可得到以下特征.
1) 随着小型车平均行程速度的增大,曲线所占的VSP分布区间越多,上下波动越剧烈.
2) 在断面位置为0时,上行方向速度越高,VSP相对越小,下行方向则相 反,速度越高,VSP相对越大;在断面位置为弯道终点时,上行方向速度越高,VSP相对越大;下行方向则相反,速度越高,VSP相对越小.
3 结 论
1) 上下行车辆在不同平均行程速度区间下的VSP分布均接近正态分布规律,速度越低,VSP的波动范围越小,更加集中分布于某一VSP分布区间,正态性越显著.
2) 上下行车辆的VSP平均变化曲线近乎相反,并在近似同一断面位置上VSP为零,车辆行驶工况发生变化.
3) 车辆过弯时,平均行程速度、断面和VSP间的关系满足多项式模型.上下行车辆平均行程速度越大,曲线所占的VSP分布区间就越多,上下波动越剧烈.
通过对山区公路弯道小型车辆的VSP分布特征进行研究,旨在对今后研究山区公路弯道小型车的油耗奠定基础,但仍存在问题需要进一步探讨:①研究其他坡度、半径的弯道和平均行程速度范围下的VSP分布特征;②在满足精度要求上收集更多车辆的相关数据,确保样本量充足,降低外界因素的影响;③将弯道的几何因素纳入考虑,进一步研究道路线形对VSP分布的影响.
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03 03:32:40
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:48
矿山安全信息(2021年21期)2021-07-04 06:33:32
矿山安全信息(2020年37期)2020-12-26 07:25:58
矿山安全信息(2020年2期)2020-03-05 05:13:56
矿山安全信息(2020年3期)2020-03-04 10:18:08
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48
汽车与新动力(2015年1期)2015-02-27 12:11:02
中国报道(2010年2期)2010-08-15 00:47:43
环球时报(2010-01-20)2010-01-20 12:04:41