小飞机航测在新能源测绘中的运用
2020-12-17 07:09:56杨乾
商品与质量 2020年44期
杨乾
中国电建集团贵州电力设计研究院有限公司 贵州贵阳 550081
进入21世纪以来,随着我国经济的高速发展,人类生产活动对原始地表产生了很大的影响,为了不影响社会主义现代化的经济建设,对国家大地地理信息数据的更新具有很大的迫切性;无人机航测技术传统航空摄影测量手段的有力补充,其具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机与航空摄影测量相结合使得“无人机数字低空遥感”成为航空遥感领域的一个崭新发展方向,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景[1]。
1 使用小飞机航测的技术优势
为了响应国家的能源政策:节能减排、大力发展新能源! 其中新能源-太阳能光伏发电迎来了发展的春天;在以往光伏电站的建设所需第一手测绘资料是通过传统的测绘方法人工跑点(地形特征点)来实现的。传统方法的作业流程为:收集资料-现场踏勘-选点埋石-控制测量-碎部测量-生产地形成果文件;相对于无人机航测其缺点有:(1)测绘外业作业周期长、外业工作量大,人工成本高。(2)工作效率受地形地貌影响较大。(3)成果文件不直观准确,不利于设计、业主使用。小飞机航测的优势主要体现在:(1)具有较强的机动性(2)正射影像分辨率高、DSM精度高。(3)成本造价低,飞机购买价格低廉,使用费用也很低,且低空飞行空域申请方便。(4)测量周期短、受气候影响较小、对起降场地的要求限制较小。(5)操作简单、运输便利。我们国家面积辽阔,地形和气候复杂,很多区域常年受积雪、云层等因素影响,导致卫星遥感数据的采集受一定限制。传统的大飞机航飞国家有规定和限制;而无人小飞机就很好的解决了这些问题。不受航高限制,成像质量、精度都远远高于大飞机航拍[2]。
2 小飞机航测主要工作流程
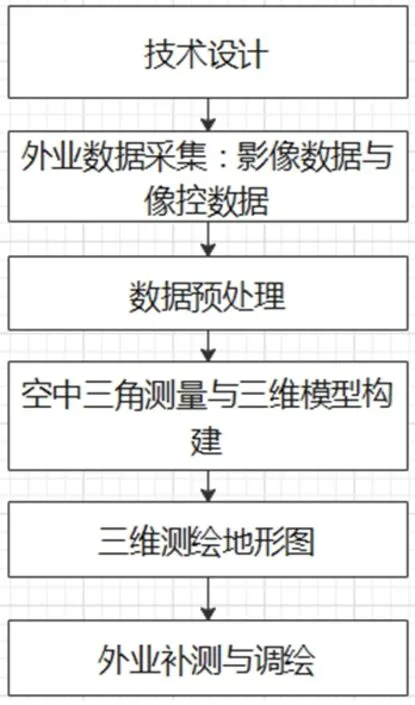
图1 航测技术流程
3 影像处理
(1)影像重叠度:由于小飞机本身重量较轻、像幅较小、受风力影响较大,导致飞行空中飞行姿态不稳定、相片变形大、影像重叠度达不到大飞机的指标要求。
(2)相机检校:小飞机所搭载的相机为非专业航测相机,影像像幅较小,且镜头畸变较大。
(3)像控点:增加地面像控点,人为提高照片精度;普通无人机pos系统定位精度不高,不能满足航测规范的精度要求[3]。
(4)飞行高度主要影响的是飞行航片中的GSD(每个像素的实际大小),飞行高度的变化必然会影响航片相幅的大小,飞行高度与GSD的关系值。通过分析数据可以得出,飞机离地面越近,GSD 数值越小,则精度越高。从中也发现,地面起伏变化大的地区选取合适的飞行高度对提高精度也是相当重要的。
4 工程应用实例
4.1 测区概况
本次选用工程为贵州省黔西南州贞丰县某光伏电厂100MWp地形图测绘工程,项目在东经105°33'0.19",北纬25°21'58.77"的位置,测区面积为2.5km2,平均海拔约1400 m,高差不超过200 m,测区主要为旱地及少部分灌木地。
4.2 试验的目的
本项目利用大疆精灵Phantom 4 RTK无人机飞行,航高为150m,航向重叠率80%,旁向重叠率70%,共飞行9个架次,航拍照片共1632 张,相片分辨率为5472× 3648 像素;在航拍区域共布设61个外业像控点,实现1: 1000 比例尺航测立体成图,以及高精度DSM、DOM 数据的快速获取。
4.3 数据获取
采用南方银河6 GNSS接收机做好外业静态控制,GPS-RTK布设像控点,大疆精灵Phantom 4 RTK无人机采集相片数据[4-5]。

图2 外业工作照片
在野外航拍结束后,进行内业数据处理分析。小飞机航测数据内业处理主要包括数据准备、数据预处理、点云分类处理、生成DOM和DSM、三维测图等几个步骤。
本试验试验Pix 4D软件进行空三测量与DOM和DSM生成,起具体流程如下图:

图3 Pix 4D数据处理流程
Pix 4D生成的DOM和DSM利用清华山维EPS3D Survey 三维测图系统生成DEM数字高程模型,在三维模型上获取地形数据信息,采集房屋、道路、地形、地貌等。等高线生成通过EPS 3D提取地形高程点,利用南方CASS 9.1生成三角网后在生成等高线,形成最终地形成果文件;成果文件如下:
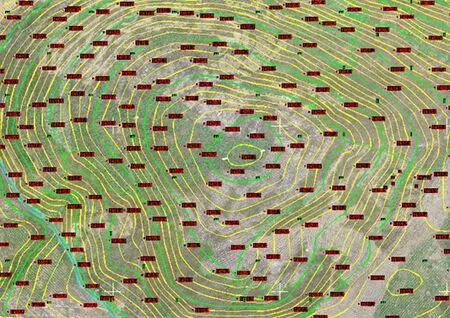
图4 1:1000地形图成果
4.4 成果精度分析
为了验证地形图的精度,在测区采用GPS-RTK实地测量部分地形特征点作为检查点,通过实地GPS-RTK测量获得的检查点坐标与地形图上的坐标对比来判断检查点点位中误差和高程中误差是否满足测绘大比例地形图的规范要求[6]。
本次在测区均匀地实测了30个电杆、50个房角点、53个像控点(校核点)、路面高程点23个、散坟26个和田坎75个,通过计算点位平面中误差和高程中误差进行精度分析。依据中误差公式求解出检查点的平面中误差M△XY,如下公式所示:

式中n为检查点个数
高程中误差M△H,如下公式所示:
式中n为检查点个数
根据《工程测量规范》(GB 50026-2007)5.1.5 表 5.1.5-1和表5.1.5-2的要求:平面误差规范规定主要地物为 图上0.6mm= 实地 0.6×1000=0.60m
高程误差规范规定≦6°等高线中误差 图上0.5Hd =实地0.5×1m=0.50m
经计算测量结果精度满足《工程测量规范》(GB 50026-2007)5.1.5表5.1.5-1和表5.1.5-2中1:1000地形图的精度要求。
5 结语
小飞机航测技术是测绘领域近几年随着计算机技术的发展而开始使用的一门新技术,通过在同一无人飞行平台上搭载多台传感器能够快速还原真实世界。本文小飞机航测系统生成了真实三维模型,然后利用清华山维EPS三维测图系统采集地形要素,制作大比例尺地形图。通过房角点、地物点坐标对比计算,验证了该方法绘制的地形图在平面和高程上均可以满足1∶1000 地形图的精度要求,可为生产大比例尺地形图提供理论依据。
(1)根据结果可证:在测区高差变化不大的区域设置相对航高150m时:生成的数据精度可靠,影像分辨率达到规范的要求,生产效率大大提高;满足1:1000大比例地形图测量的精度要求。
(2)在航高不变的情况下:使用8~61个相控点作为平高控制点进行空三计算,实际对比发现高程精度提高不明显;若采用7个或7个以下相控点作为平高控制点进行空三计算,对比发现高程精度受平高点影像较大。因此,本项目推荐使用均匀分布在测区周围的10个平高控制点[7]。
(3)利用小飞机低空摄影测量获得的地形点点位精度满足1:1 000数字地形图测绘的平面精度及高程精度的要求。但由于小飞机姿态差、受风力影响较大,在外业小飞机航测作业时需按照航测外业规范要求,降低影响无人机航拍影像质量的外界因素、提高影像精度。
(4)绝大多数地物点都能在正射影像(DOM)中准确判读,测区范围内被遮挡的地物如电杆、散坟和地下管线等不能直接在正射影像中准确获取的,应采用常规全站仪或GPS-RTK进行野外实测补绘[8-9]。

表1 与全野外数字测图法精度比较

表2 DOM与DEM分辨率单位:m

表3 不同比例尺DOM与DEM分辨率要求,单位:m
(5)在地物简单的地方、地形特征变化规律的地方采用小飞机航测进行1:1000大比例尺测图工作:其测绘成果精度高、影像分辨率高、成果叠加影像显示直观、能较大的节约生产成本,提高工作效率[10]。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
中外文摘(2021年10期)2021-05-31 12:10:40
河北地质(2021年4期)2021-03-08 01:59:14
当代陕西(2020年23期)2021-01-07 09:24:44
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
小学生优秀作文(低年级)(2018年6期)2018-05-19 01:54:27
作文通讯·高中版(2017年6期)2017-07-10 03:21:34
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
陕西画报(2017年1期)2017-02-11 05:49:48