
基于风速的风力机功率控制研究
2020-12-15 08:36马会贤
科学技术创新 2020年36期
孙 娜 马会贤
(银川能源学院,宁夏 银川750105)
调节变桨距的风力机功率时主要依靠叶片自身特有的气动特点,与此同时还可以针对叶片桨的距角进行相应的调整也可以达到调节的目的。在风电机组的额定的风速下,有效的对桨距的角度控制在零度较小的标准范围中,进而其达到一台定桨距的风力机,而发电机所输出的相应功率则依据叶片自身的气动性伴随风速的变化;如果实际的功率高于额定的标准功率时,变桨距会对叶片的桨距角进行相应的调整,进而确保发电机所输出的功率被局限于额定标准范围的附近,由此最终达到以恒定功率的运行状态。
1 变桨距角控制
1.1 变桨距角控制的工作原理
变桨距控制的主要功能之一是在高风速下维持发电机输出功率恒定,此外,在电网故障下可以通过控制风轮转速来提高风力发电机组的暂态稳定性。
典型变桨距控制型风力机的机械功率与风速曲线如图1所示,如果实际的风速超出额定的标准风速时,使用变桨距的控制技术便可以促使风力机来得到一定的功率维持在其额定值处。
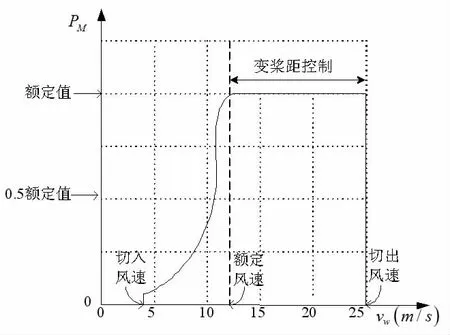
图1 典型变桨距控制型风力机的机械功率与风速曲线
图2 给出了变桨距控制的工作原理。风速小于等于额定值,叶片保持额定攻角αR处,如图2a)。风速高于额定值,叶片攻角减小,升力变小。叶片完全顺桨时,叶片攻角对准风向,如图2b 中以虚线绘制的叶片角度。图3 是变桨距控制机构的性能曲线,在高于额定风速条件下,对风力机捕获的功率可以进行控制。
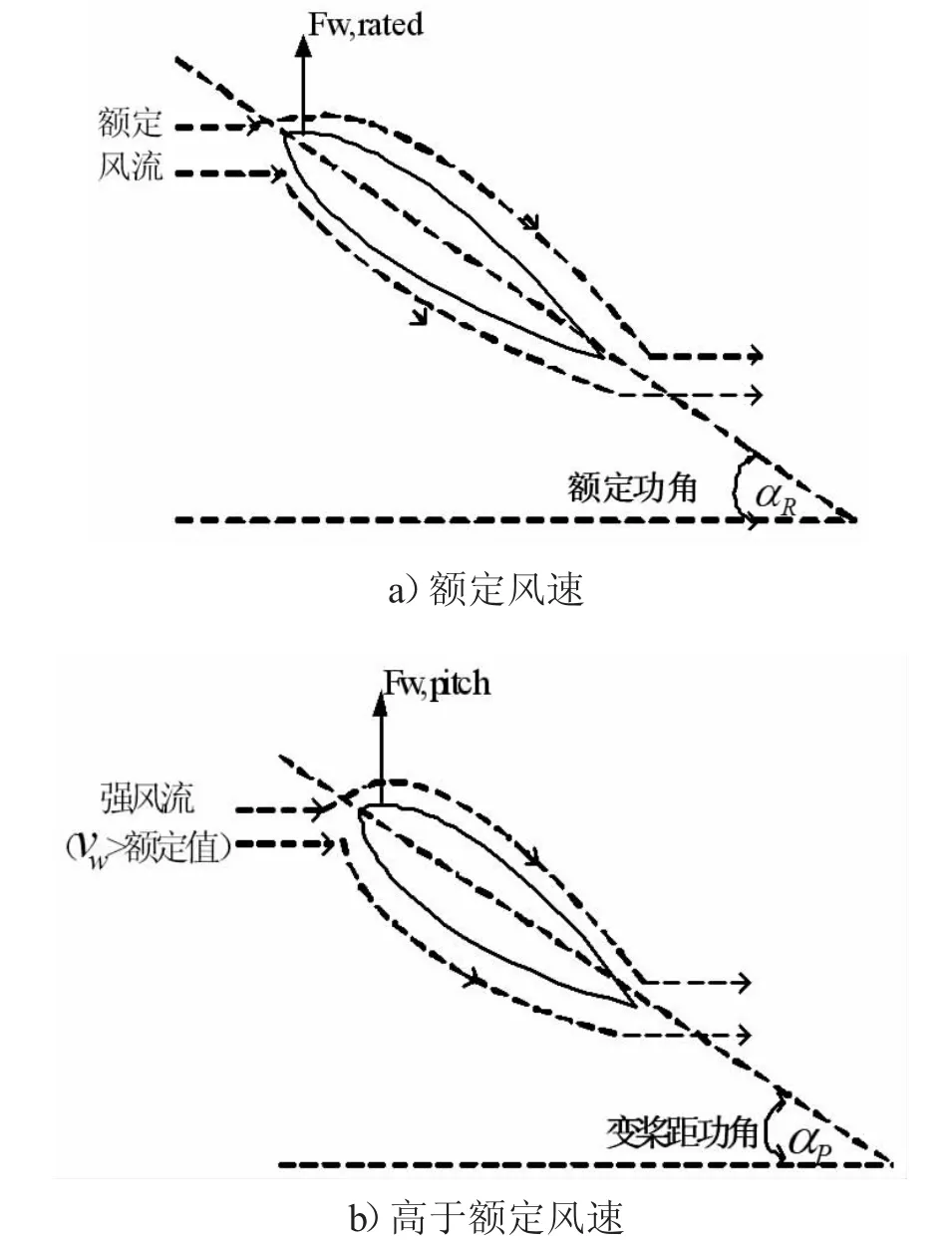
图2 变桨距控制技术的空气动力学原理
已知风力机的输出机械功率Po正比于Cp,而风能利用系数Cp为叶尖速比λ 和桨距角β 的函数。
风能利用系数Cp采用如下公式近似计算:

由式(1)可得变桨距风力机Cp~(λ,β)特性曲线,如图3所示。
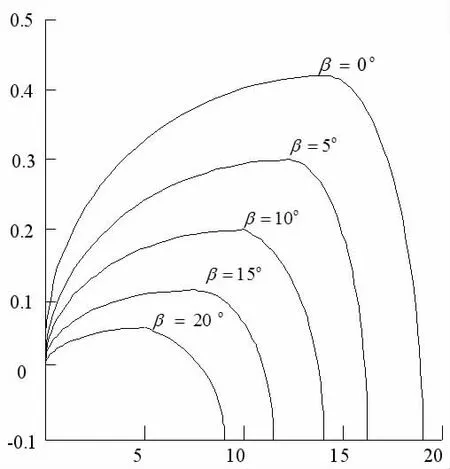
图3 变桨距风力机Cp~(λ,β)特性曲线
1.2 高风速下的变桨距控制
变速风力机的桨距角调节装置可以通过风轮机转子转速的偏差量进行相应的调整,即转速控制;还能够利用风组输出的功率加以调整,即功率控制。
而在本文则依据实际的情况选择不同控制目标时的不同,当处于高风下使用功率控制的形式,而在电网故障时则使用转速控制的形式。
本次PI 控制桨距角,其主要整体的结构干分简单,而且反应的速度也特别快。
如果风速大于额定标准,但低于切出风速时,为了避免风力机可能受到破坏,则对风力机调整功率,确保处于恒定。使用PI 控制器来有效的控制桨距角,然后再使用延时系统,针对桨距伺服驱动的系统加以建模。
高风速下变桨距风力机功率控制模型为:

式中:TI为积分时间常数(包括一阶延时系统);KP为比例增益系数;β0=0°为初始桨距角;ΔP=PG-Pref为风力发电机的输出功率偏差。
其控制框图如图4 所示。
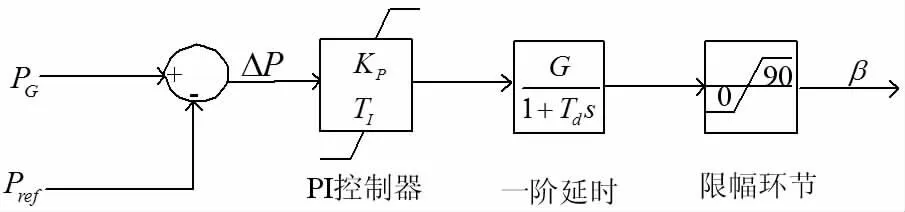
图4 高风速下变桨距风力机的功率控制框图
2 双馈异步风力发电机(DFIG)
2.1 DFIG 工作原理
以DFIG 为基础的风电系统被广泛使用。而依据转子转速发生的实际变化来讲,DFIG 主要有三种运行的状态,具体如下所示:
(1)亚同步运行:风力发电机的实际转速如果低于气隙旋转的磁场转速;
(2)超同步运行:风力发电机的实际转速如果高于气隙旋转的磁场转速;
(3)同步运行:风力发电机的实际转速如果等于气隙旋转的磁场转速。
2.2 DFIG 风力机桨距角控制仿真模型
在风力机模型中,风力机的平均风速是12m/s,风速Vw 可以通过外部控制,实现在不同时刻增大或减小的调节。同时,风速可以模拟阵风、噪音等干扰条件下的情况。
桨距角控制模型如图5 所示,采用功率跟踪和转速跟踪作为调节桨距角的目的,在风速大于风机额定风速12m/s 时,桨距角控制投入。通过改变桨距角,改变Cp。
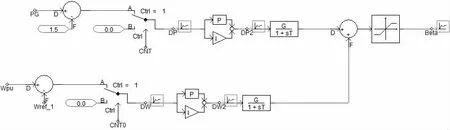
图5 桨距角控制模型
仿真模型详细考虑了风速变化、风力机、桨距角控制、功率变换控制系统等,高度接近实际典型风力发电机,具有较好的准确性。
猜你喜欢
科技风(2022年34期)2022-12-14
科学技术创新(2022年32期)2022-11-03
农业工程学报(2022年7期)2022-07-09
中国设备工程(2022年9期)2022-05-19
防爆电机(2022年1期)2022-02-16
能源工程(2021年1期)2021-04-13
船舶与海洋工程(2019年6期)2019-12-25
北京航空航天大学学报(2017年3期)2017-11-23
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
