
一种智能交通灯控制系统
2020-12-15 08:36陈震
科学技术创新 2020年36期
陈震 李 平
(泰州职业技术学院信息技术学院,江苏 泰州225300)
1 概述
随着我国城市化进程的加快,城市道路交通越来越发达,但是机动车数量的快速增多也使得道路交通的拥堵问题变得越来越严重,因此交通灯控制的重要性也与日俱增[1-2]。目前,交通灯的时间大部分都是人工设置好的,在遇到早晚上下班高峰时段,都需要人工根据路口的交通拥堵情况手动控制交通灯的时长,智能化程度很低。虽然也有很多智能化交通灯控制系统出现和应用,使得交通拥堵问题得到一定程度的缓解,但是系统的控制算法相对复杂,成本较高。本文提出一种简便的交通灯控制系统,通过两个检测器自动判断道路车辆的拥堵程度,并根据道路车辆的拥堵程度实时调整交通灯的时长。
2 车道拥堵的判断
以单交叉路口为例,单交叉路口是一个4 相位系统,四个方向均有右转直行和左转2 个车道。东西向右转直行是第1 相位,东西向左转是第2 相位,南北向右转直行是第3 相位,南北向左转是第4 相位。在车道离路口一定的距离前后分别埋设2个车速检测模块,●为一号检测点,◆为二号检测点,1 为左转道,2 为右转直行道,如图1 所示。

图1 单交叉路口示意图
车速检测模块会感应到其上方是否有车辆通过,若有车辆经过其上方,检测模块输出高电平,否则检测模块输出低电平。因此,当车辆通过车速检测模块时,会产生一个脉冲信号,脉冲信号的宽度代表车辆通过检测器的时长,脉冲宽度越小,说明车速很快,反之说明车速很慢。本系统在路口交通灯变为绿灯后,忽略掉起动损失时间,根据车道前后2 个检测器上方车辆通过的速度与设定的阈值做比较,自动判断车道的拥堵程度。判断规则如下所示:
一号点不拥堵,二号点不拥堵,说明车道不拥堵;
一号点拥堵,二号点不拥堵,说明车道轻微堵拥;
一号点拥堵,二号点拥堵,说明车道严重堵拥。
3 红绿灯时长的设置策略
根据前后2 相的拥堵情况,自动设置红绿灯的时长。以第1相位和第2 相位为例:
若东西右转直行方向不拥堵,东西左转方向不拥堵,东西右转直行方向绿灯时长不变,东西左转方向绿灯时长不变;若东西右转直行方向不拥堵,东西左转方向轻微拥堵,东西右转直行方向绿灯时长减少10 秒,东西左转方向绿灯时长增加10 秒;
若东西右转直行方向不拥堵,东西左转方向拥堵严重,东西右转直行方向绿灯时长减少20 秒,东西左转方向绿灯时长增加20 秒;
若东西右转直行方向轻微拥堵,东西左转方向不拥堵,东西右转直行方向绿灯时长增加10 秒,东西左转方向绿灯时长减少10 秒;
若东西右转直行方向轻微拥堵,东西左转方向轻微拥堵,东西右转直行方向绿灯时长增加10 秒,东西左转方向绿灯时长增加10 秒;
若东西右转直行方向轻微拥堵,东西左转方向拥堵严重,东西右转直行方向绿灯时长增加10 秒,东西左转方向绿灯时长增加20 秒;
若东西右转直行方向拥堵严重,东西左转方向不拥堵,东西右转直行方向绿灯时长增加20 秒,东西左转方向绿灯时长减少20 秒;
若东西右转直行方向拥堵严重,东西左转方向轻微拥堵,东西右转直行方向绿灯时长增加20 秒,东西左转方向绿灯时长增加10 秒;
若东西右转直行方向拥堵严重,东西左转方向拥堵严重,东西右转直行方向绿灯时长增加20 秒,东西左转方向绿灯时长增加20 秒。
4 系统硬件设计
整个系统由车速检测模块、智能控制主机、交通灯模块组成。车速检测模块、智能控制主机和交通灯模块通过Zigbee 通信技术组网,实现无线通信。
4.1 车速检测模块
车速检测模块用于采集交通路口拥堵的情况,由超声波模块和控制器模块组成。控制器模块采用STC8A8K64S4A12 作为主控芯片,负责超声波模块的驱动和车速检测。
车道处于绿灯通行时,超声波发射探头发出超声波,其上方有车辆经过时,接收探头会接收到反射波,超声波模块输出高电平给控制器,若没有车辆经过,接收探头接收不到反射波,超声波模块输出低电平给控制器。这样,控制器根据高电平的时长就可以估算出车辆的速度,并根据策略判断出检测点的拥堵程度,再通过ZigBee 模块将检测点的拥堵信息发送到智能控制主机。
4.2 智能控制主机
智能控制主机采用STM32 作为主控芯片,通过Zigbee 模块与车速检测模块和交通灯模块组成无线通信网络。智能控制主机根据接收到的路口拥堵信息智能判断出路口红绿灯的时长,再通过Zigbee 模块将控制信号发送给交通灯模块,动态控制红绿灯的时长,缓解路口拥堵的压力。
同时,主控芯片通过串口扩展一个蓝牙模块BTM4504C1X,用于与手机实现通信,这样通过手机APP 可以随时掌握路口的拥堵情况,并可以对交通灯系统进行人工控制。
4.3 通信模块
Zigbee 模块采用顺舟智能的SZ05-L-PRO-2,该模块基于TI-CC2530 芯片方案[3-4]。模块体积小巧,可以很容易的嵌入其他设备,提供快速便捷低成本的无线网络接口,可节省开发时间和成本。模块符合Zigbee Pro 国际规范,具有通讯距离远、超低功耗、抗干扰能力强、组网灵活稳定等优点和特性。通过模块的串口可实现一点对多点及多点对多点之间的设备间数据的无线透明传输。
SZ05-L-PRO-2 模块采用5~9V 电源供电,而STM32 芯片是3.3V 供电,因此,需要通过电平转换芯片SP3232 与模块连接,典型应用如图2 所示。
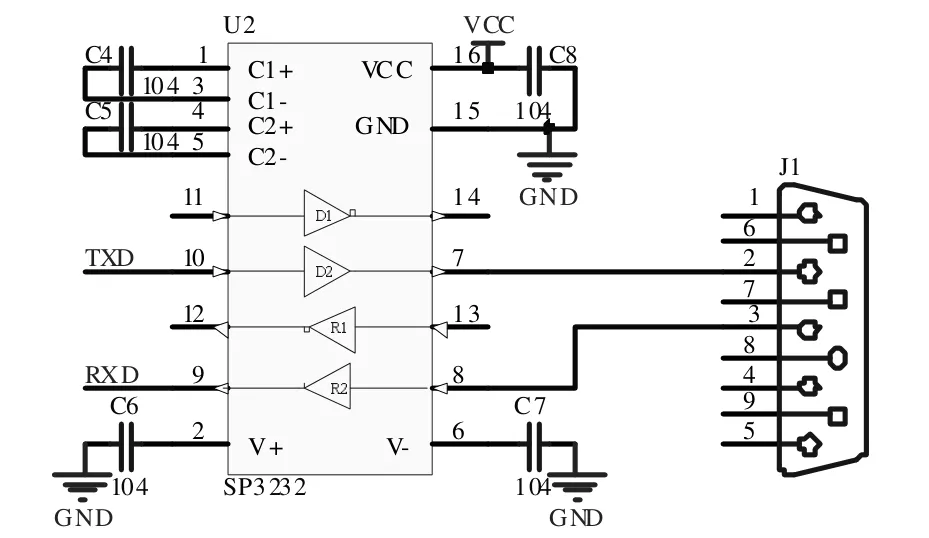
图2 平转换接口电路
整个系统中,智能控制主机作为中心协调器是网络的中心节点,负责网络的发起组织、网络维护和管理功能;车速检测模块和交通灯模块是终端节点,只进行本节点数据的发送和接收;根据现场通信距离的远近决定是否增加模块作为路由器,负责数据的中继转发和网络维护功能。
蓝牙模块采用金瓯公司的百米蓝牙模块BTM4504C1X。模块采用CSR BC04 External 芯片设计,内置了金瓯公司专用数据传输软件固件,兼容蓝牙3.0 规范及以下的设备,数据传输稳定,传输距离可达100 米。数据通过UART 串口透明传输,UART信号为3.3V 的TTL 电平,与STM32 可以直接连接,使用方便。
4.4 显示模块
交通灯倒计时显示采用2 位7 段LED 共阴数码管。四个方向的倒计时显示分为两组,相当于两组数码管,LED 驱动控制专用芯片TM1616 可以直接驱动4 位数码管,因此,四个方向的数码管用一片TM1616 驱动即可。主控芯片与TM1616 只需3根线连接,通过串行通信对数码管进行控制。电路如图3 所示。采用红黄绿三种LED 灯模拟十字路口的交通灯。
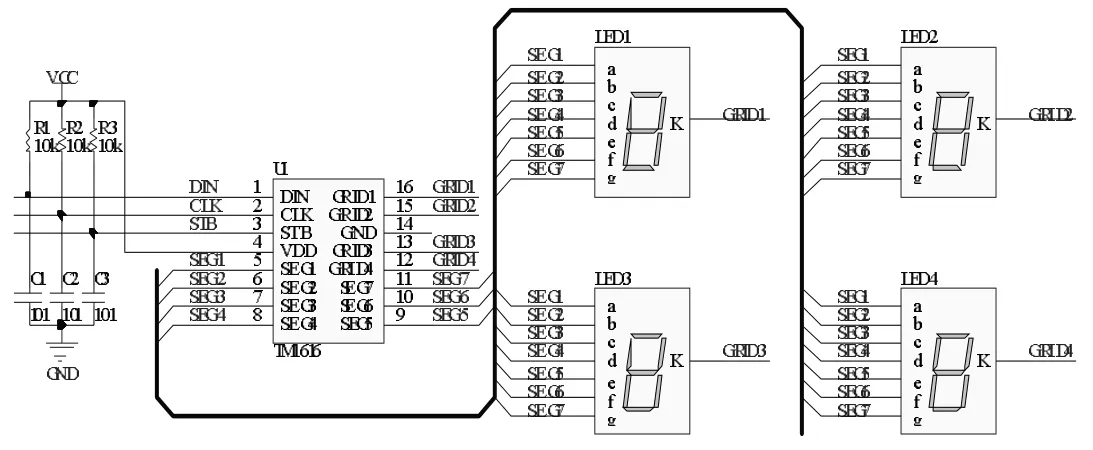
图3 交通灯驱动电路
5 软件设计
根据系统的整体功能需求,智能控制主机的程序流程图如图4 所示。
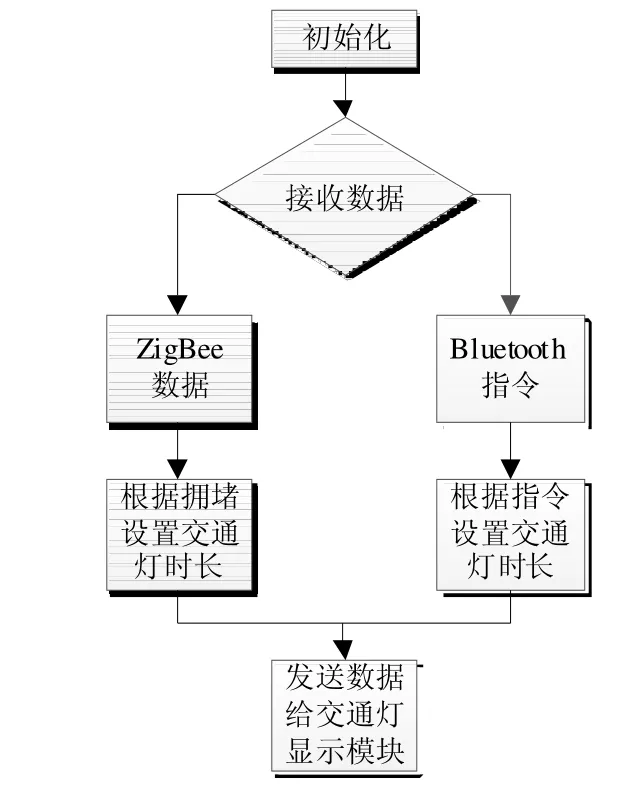
图4 控制主机程序流程图
6 结论
本文提出一种简便方法,通过检测器检测车辆通过交通路口的时速来判断路口的拥堵程度,同时根据前后两相的拥堵情况,动态改变红绿灯的时长。根据此方法完成了系统的软硬件设计,并通过仿真实验,验证了该方法能有效降低路口的拥堵程度。但该方法仍有不足之处,红绿灯动态调整的时长目前是固定不变的,不一定适用于所有的交通路口,今后还需要对不同路口的车流量实际数据进行分析,才能得到精确的动态调整时长。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
现代青年·精英版(2022年3期)2022-04-06
新民周刊(2021年46期)2021-12-18
小天使·四年级语数英综合(2021年3期)2021-05-10
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
电子制作(2019年12期)2019-07-16
电子制作(2019年24期)2019-02-23
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
电子制作(2016年21期)2016-05-17
汽车文摘(2015年11期)2015-12-02
