
推力矢量无人机大机动非线性控制技术
2020-12-15 08:37田海铭王芬芬华艺欣
科学技术创新 2020年36期
田海铭 王芬芬 华艺欣
(中国飞行试验研究院,陕西 西安710089)
随着现代科学技术的发展,各种新型无人机层出不穷,无人机已经从战场的辅助角色慢慢进化为现代空战的主力,在未来的战争中有望取代有人战斗机的角色,成为空战主力军。
对于无人机控制,陈怀民[1-3]等人采用PID、鲁棒控制等线性方法对飞机进行控制器设计,但对于非线性严重的大机动飞行,用线性控制工作量大且控制效果不好。
本文对推力矢量无人机的机动飞行控制方法进行研究,由于机动飞行过程中无人机非线性严重,采用传统的线性控制已经很难满足设计需要,因此采用动态逆和H∞鲁棒控制相结合的非线性方法对飞机进行控制,通过对机动飞行的仿真,验证该方法的可行性。
1 H∞鲁棒动态逆内环控制器设计
通常将无人机动力学方程和运动学方程中的十二个状态变量,根据带宽将其分为快回路状态量、较快回路状态量和慢回路状态量。本节对变化最快的姿态角速率变量x1=[p,q,r]进行动态逆控制器设计,并将此作为鲁棒动态逆控制器的内环。
快回路状态量可表示为状态方程:)

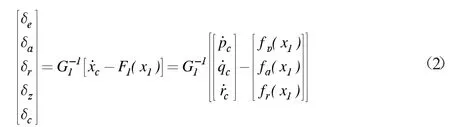
可将动态逆内环控制器表示为:


2 H∞鲁棒动态逆外环控制器设计
H∞鲁棒控制理论是在实有理函数空间(Hardy 空间)中,以某些评价函数的无穷范数(H∞范数)作性能指标,通过优化H∞范数而获得具有鲁棒性能的控制器的一种控制理论。
受系统的鲁棒稳定性以及性能指标的影响,本次采用基于混合灵敏度S/KS 问题的H∞鲁棒控制,用于解决非结构不确定性下的输出端干扰抑制问题。
H∞鲁棒控制方法是一种线性控制方法,在前文的动态逆控制器设计中,已经通过反馈线性化将非线性的无人机系统转化成了线性系统,因此,以动态逆为内回路的H∞鲁棒控制器设计可以实现。
推力矢量无人机内回路动态逆控制律形式为:u=G-1[-F(x)+x觶c],因此,可将上述动态逆控制器结构视为鲁棒控制中的实际控制对象P,从而获得鲁棒动态逆控制器的结构图如下:
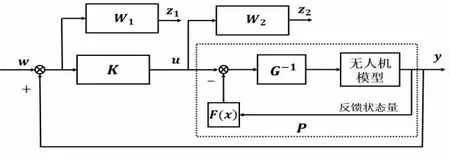
图2 鲁棒动态逆控制器结构
2.1 控制对象P
在鲁棒控制器设计中,首先需要求得控制对象P 的传递函数,该控制器以动态逆控制器作为实际控制对象,动态逆回路的输入为u=[pc,qc,rc],系统的输出为飞机六自由度模型的输出,针对特定的输出,选择对应的输入u 进行控制。可以借助Matlab 软件中的linmod()函数从所搭建的飞机模型中对P 进行求解。
2.2 加权函数W1,W2
由于H∞鲁棒控制是通过对系统频域进行分析设计的,所以加权函数W1,W2的选取就显得尤为重要,加权函数的选取最终决定了控制系统的性能。此外,加权函数的阶次也直接影响控制器的阶次,所以为了得到较为简单的低阶控制器,加权函数的阶次不宜太高。
通常选择的加权函数的形式为:

式中,A<1 为允许的最大稳态误差,ω0为期望带宽,M为灵敏度峰值(一般情况下,A=0.01,M=2)。从控制器设计方面来说,W1-1为回路成形期望灵敏度的上限,W2-1影响控制器的输出u。
2.3 广义系统G
将上面得到的子系统P,W1,W2转换成状态空间的表现形式,可以得到广义系统G(s)。
2.4 控制器求解
在控制对象P,加权函数W1,W2,以及广义系统G 都已经确定的情况下,利用Matlab 工具箱,通过调用函数hinfsyn()来计算系统的H∞控制器K,函数的调用形式为:

函数输入中:G 为系统的广义对象,nmeas 为连接到控制器的测量输出个数(此处为1),ncon 为控制输入的个数(此处为1),gmin 为γ 的下界(此处选择0.5),gmax 为γ 的上界(此处选择20),tol 为γ 的迭代精度(此处选择0.001)。
函数输出中:k. 为求得的H∞最优控制器,g 为整个闭环控制系统的传递函数,gfin 为最终的γ 值。
3 大机动仿真验证
为验证鲁棒动态逆对机动飞行控制的可行性,选取三种典型的机动动作(稳定盘旋、战斗转弯、半滚倒转)进行仿真验证,仿真结果如下。
3.1 稳定盘旋
无人机做稳定盘旋时受力可分解为:
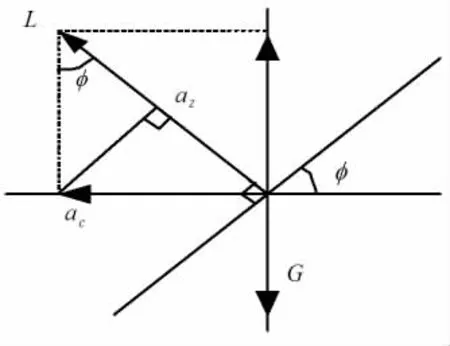
图3 滚转状态下无人机受力分析
垂直平面内,升力L 的垂直分量和重力平衡,水平面内,升力L 的水平分量提供向心力,在机动飞行时,通常用法向过载来表示无人机当前状态,稳定盘旋时的转弯半径可由过载求出:

在鲁棒动态逆控制器的作用下,无人机在有无外界扰动下都能很好的完成稳定盘旋机动,且控制器有很好的抗干扰能力。
3.2 战斗转弯
空战中常采用战斗转弯机动来夺取高度优势和占据有利方位,相比稳定盘旋而言,战斗转弯机动就比较复杂,机动动作中需要同时改变无人机的飞行方向和增加飞行高度。因此按照前文叙述,将战斗转弯按阶段分解为进入段、退出段和平飞段,各阶段可具体描述为:
进入段:当无人机从平飞状态开始做战斗转弯机动时,需要控制无人机迅速转向的同时爬升一定的高度,此时通过转动副翼控制无人机滚转,在控制滚转角逐渐增大的同时,升降舵和推力矢量控制法向过载增加,使无人机迅速的爬升高度。
退出段:当无人机机头快要调转180°且爬升了一定高度后,开始进入退出段,此时控制无人机减小滚转角并停止继续增加高度,以改出到平飞状态。
平飞段:在无人机的滚转角改平后,战斗转弯机动结束,控制无人机平飞。
仿真结果表明,在鲁棒动态逆控制器作用下,该无人机能够很好的完成战斗转弯机动,机动过程中各状态都达到了预期,效果良好,且有着良好的抗干扰能力。
3.3 半滚倒转
半滚倒转机动是空战中的一种高难度垂直机动动作,半滚倒转可以实现无人机的快速掉头和降高。为了实现该机动,将其分为三个阶段:进入段、保持段、退出段,各阶段对应的具体描述如下:
进入段:当无人机开始做半滚倒转机动时,首先通过副翼控制无人机绕机体x 轴滚转180°,由于该阶段滚转角变化跨度较大,无法直接通过控制器进行控制,所以先采用控制副翼偏转固定角度的开环控制方法改变滚转角,待滚转角接近180°后接入控制器使其稳定。
保持段:当控制无人机滚转180°后,无人机处于倒飞状态,此时的法向过载方向向下。该阶段需控制法向过载增大,使无人机做向下的半筋斗动作,过程中保持滚转角不变。
对于滚转角给定指令,保持段的前半段和后半段有所不同,在半筋斗的前半段,机体z 轴向上,此时滚转角为180°;筋斗后半段,z 轴向下,此时滚转角为0°。整个过程中法向过载方向不发生变化。
退出段:当向下的半筋斗快要结束时,减小给定过载,控制无人机保持平飞。此时滚转角保持为0。
仿真结果表明,在鲁棒动态逆控制器作用下,该无人机能够完成半滚倒转机构,且飞行过程中各状态都达到了预期,控制效果良好,抗干扰能力强。
4 结论
4.1 本次设计的H∞鲁棒动态逆控制器能够很好的对机动飞行进行控制。
4.2 通过内环动态逆控制,实现推力矢量和气动舵的控制分配。
4.3 对非线性系统有着良好的控制效果。
4.4 控制器对外界风扰动等具有很强的抗干扰能力。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
军事运筹与系统工程(2020年2期)2020-11-16
模具制造(2019年10期)2020-01-06
北京航空航天大学学报(2019年9期)2019-10-26
中国建筑金属结构(2018年4期)2018-05-23
北京航空航天大学学报(2018年1期)2018-04-20
计算技术与自动化(2016年4期)2017-01-11
计算技术与自动化(2016年4期)2017-01-11
载人航天(2016年4期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
