
扁平漆包线抖动干扰处理的研究
2020-12-08 03:15:32宋章明贺慧勇黄跃俊
计算机测量与控制 2020年11期
宋章明,贺慧勇,黄跃俊
(1. 长沙理工大学 物理与电子科学学院,长沙 410114; 2. 近地空间电磁环境监测与建模湖南省普通高校重点实验室,长沙 410114)
0 引言
漆包线是电机、电器和家用电器等产品的主要原材料,漆包线的质量决定了这些产品的性能[1- 2],因此,对漆包线的质量检测至关重要。目前国内外使用的日本盐水法、压轮式直流高压漆膜连续性检测法等检测方法都存在或多或少的问题[3]。因此,对于漆包线中的一种扁平漆包线,采用图像处理的方法对其表面缺陷进行在线检测。图像处理方法包括背景分离,缺陷特征提取,缺陷分类等。采用帧间差分法对扁平漆包线做背景分离,由于扁平漆包线抖动的存在,容易产生抖动干扰,与真实缺陷混淆,影响缺陷检测的准确率,因此本文主要研究抖动干扰的消除。
2015年,陈勇等人在文献[4]中提出了运用特征点匹配做运动补偿的方法对运动干扰做消除,但是这种方法消耗时间长,不满足在线检测的要求。2017年,朱妍妍等人在文献[5]中提出了将与边界线连接的连通域置零,实现干扰消除,这种方法消耗时间可以满足在线检测要求,但是当真实缺陷与抖动干扰连接构成一个连通域时,这种方法会误消除真实缺陷。
针对以上常见方法的不足之处,本文提出一种改进方法,首先分析了抖动干扰的分布区域,得到了抖动干扰与真实缺陷不处在同一行,且存在抖动干扰的行上前景像素点数量较多的性质。然后在分布区域内,将前景像素点数量超过一定阈值的行置零,实现对抖动干扰的消除。阈值的选取利用一种改进的Otsu处理分布图得到,该图是将图像所有行,按照行上前景像素点数量多少,统计行出现的频率。
1 抖动干扰产生原因及性质
1.1 抖动干扰产生原因
图像处理检测方法中,采用帧间差分法对扁平漆包线做背景分离。已知当前帧的灰度化图像fn(x,y)与前一帧灰度化图像fn-1(x,y),由式(1)可以得出帧差图像Dn(x,y)。设定阈值T,按照式(2)对帧差图像进行二值化处理,得到二值化图像Rn(x,y),灰度值为0的点为背景像素点,灰度值为255的点为前景像素点[6],为了方便观察,二值图像中黑色像素点代表前景像素点,白色像素点代表背景像素点。
Dn(x,y)=fn(x,y)-fn-1(x,y)
(1)
(2)
实际生产线上,扁平漆包线由牵引机带动在水平方向上运动,由于扁平漆包线抖动的存在,帧间差分法去背景会导致抖动干扰的存在。特别的,扁平漆包线上存在张力,此处不考虑样线倾斜抖动的情况。理想情况下,如图1(a)所示,扁平漆包线上的缺陷“A”灰度值为0,其余部分灰度值为127。样线边界处有两条灰度值为0的条带,宽度为Δ,其余背景灰度值为255,阈值T取50。这条样线在x方向上运动的同时,y方向以及垂直于x-y平面的z方向上存在抖动。假设扁平漆包线在当前帧图像中上边界为a2,下边界为b2,在前一帧图像中上边界为a1,下边界为b1,抖动距离为a。当样线向y轴负方向抖动时,有以下关系:
|a1-b1|=|a2-b2|
(3)
a=|a1-a2|=|b1-b2|
(4)

图1 帧间差分法背景分离过程
如图1(b)所示,运用帧间差分法得到扁平漆包线的背景分离图像。在扁平漆包线样本区域内,抖动干扰宽度为a-Δ,分布在背景分离图像中与样线下边界距离小于等于a-Δ的行,呈横向分布,长度为图像列数,并且抖动干扰与真实缺陷不处在同一行。另外在上边界上方也有一条宽度为Δ的抖动干扰,由于存在于样本区域外,通过图像剪切可以去除,所以此处不考虑它的影响。类似的,当扁平漆包线向y轴正方向抖动时,抖动干扰分布在背景分离图像中与样线上边界距离小于等于a-Δ的行。因此,在理想情况下,抖动干扰存在于背景分离图像中与样线上下边界距离小于等于a-Δ的行组成的两个区域,长度为图像列数,并且不与真实缺陷处在同一行。
1.2 抖动干扰性质
如图2(a)所示为实际生产线上采集得到的扁平漆包线灰度图像,样线上下边界处有两条灰度值较低的条带。对灰度图像做反二值化操作,扫描得到二值化图像每一行前景像素点个数,将其投影到坐标轴上,如图2(b)所示,曲线上中间两次显著跳变的地方就是样本的上下边界值[7-9],统计曲线跳变凸起的部分可以得到这两条条带的宽度。根据上下边界对帧间差分法结果图像剪切,得到扁平漆包线的背景分离图像[10- 11],结果如图2(c)所示。

图2 样本灰度图像及背景分离图像
由于光照不均匀等多种因素的影响,存在抖动干扰的行上面的前景像素点数量较多,接近图像列数,而非存在抖动干扰的每行上前景像素点个数都是图像列数。另外,运用上述方法得到样本在前一帧图像中上边界为a1,下边界为b1,在当前帧图像中上边界为a2,下边界为b2,样本边界处四条灰度值较低的条带宽度分别为Δ1,Δ2,Δ3,Δ4。由于扁平漆包线边界定位存在误差,所以4个边界值的范围为[a1-Δ1,a1+Δ1],[b1-Δ2,b1+Δ2],[a2-Δ3,a2+Δ3],[b2-Δ4,b2+Δ4]。此时,抖动距离a满足以下关系,其中n1= max{Δ1,Δ2,Δ3,Δ4}:
a≤max{|a2-a1|+Δ3+Δ1,|b2-b1|+Δ4+Δ2}≤
max{|a2-a1|,|b2-b1|}+2n1
(5)
所以,抖动干扰宽度a-Δ有以下关系,其中,n2= min{Δ1,Δ2,Δ3,Δ4},m= max{|a2-a1|,|b2-b1|}:
a-Δ≤max{|a2-a1|,|b2-b1|}+2n1-n2≤
m+2n1-n2
(6)
综上所述,在实际生产线上,抖动干扰有以下性质:
1) 抖动干扰与真实缺陷不处在同一行。
2) 背景分离图像中存在抖动干扰的行上,前景像素点数量较多, 接近图像列数。
3) 抖动干扰分布在背景分离图像中与上下边界距离小于等于m+2n1-n2的行组成的两个区域。其中,m为前后两帧图像中样本上边界差值与下边界差值的最大值,n1为样本边界处四条灰度值较低的条带宽度的最大值,n2为这四条条带宽度的最小值。
2 抖动干扰消除
2.1 抖动干扰与真实缺陷的分割
由于真实缺陷与抖动干扰不会处在同一行,且存在抖动干扰的行上,前景像素点数量较多。因此,在抖动干扰区域内,为了将真实缺陷与抖动干扰区分开,根据行上前景像素点数量,将区域内每一行分割成抖动干扰行和真实缺陷行。以图像的行作为最小单位对抖动干扰和真实缺陷进行分割,可以有效地解决常见方法误消除与抖动干扰连接的真实缺陷的问题。
对于背景分离图像,扫描抖动干扰区域内的行,得到每一行前景像素点个数,当该数量大于t*时,认为该行上存在抖动干扰,令该行所有像素点灰度值为0。当该数量不大于t*时,令该行所有像素点灰度值保持不变。最后得到抖动处理后的图像。流程图如图3所示。
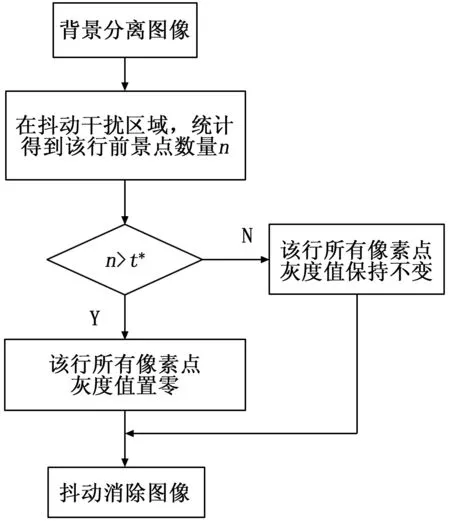
图3 抖动消除流程图
2.2 分割阈值选取
阈值t*的选取对分割结果至关重要,本文将背景分离图像中的所有行,按照该行上前景像素点数量的大小,统计该行出现的频率,得到了图像的行的分布图。因为该分布图主要是为了区分真实缺陷和抖动干扰,于是不考虑前景像素点数为0的行。由于单张图像具有前景像素点的行数量较少,不具有随机性,应该统计多张图像的行的分布图。
取实际生产线上同一条扁平漆包线的200帧样品图像,大小为640×480,如图4(a)所示,为这200帧图像的行的分布图,可以看出该分布图为“单峰”图,图像真实缺陷主要集中在这个“单峰”上,找到“单峰”右侧谷底的位置即得到了分割阈值t*。然而一般的迭代法,Otsu等自适应阈值分割算法适用于“双峰”图,对“单峰”图做分割效果并不好[12- 13],因此,本文采用一种改进的Otsu[14],得到这种“单峰”图的阈值,该方法又称为NVE[15]方法(Neighborhood valley-emphasis method)。
对k帧大小为m×n的二值化图像,总行数为k×n行,行前景像素点数g∈[1,m],f(g)为行前景像素点数为g的行的数量。行前景像素点数g的行出现的概率为:
(7)
在阈值t的分割下,k帧图像所有具有前景像素点的行被分为两个类别,计算两类之间的类间方差σB(t),改进后的类间方差ξB(t)为
(8)

(9)
通过最大化ξB(t)来选择最佳阈值t*:
(10)

如图4(a)所示,运用NVE方法得到这条扁平漆包线样本的最佳分割阈值t*为112,即行上前景像素点个数大于112的行为抖动干扰行。如图4(b)所示,为改进方法的抖动干扰消除结果。

图4 分割阈值选取及改进方法结果
3 实验结果
为了比较改进方法与文献[4]和文献[5]提出方法的处理时间,通过实验对6张带有抖动干扰的图像进行消抖处理,分别得到3种方法的处理时间,表1为3种方法处理抖动干扰的时间对比,通过处理多个样本图像可以得出,文献[4]提出的利用运动补偿消除干扰的方法处理时间太长,不适合用于扁平漆包线表面缺陷的在线检测。改进方法的处理时间要明显少于文献[5]提出的方法。
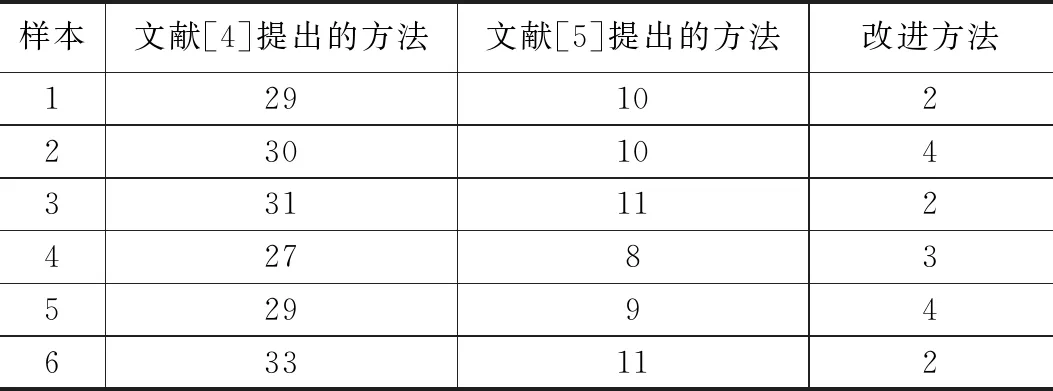
表1 改进方法与常见方法处理时间对比 (ms)
为了验证抖动干扰区域划分以及分割阈值选取的准确性,将背景分离图像的每一行上的前景像素点个数投影到坐标轴上,横坐标为行数,纵坐标为该行上前景像素点个数,投影曲线如图5(a)所示。从图中可以看出,划分出来的抖动干扰区域可以完整地包含抖动干扰,分割阈值可以较好地将抖动干扰和真实缺陷分割。
为了更直观地体现文献[5]提出方法的不足之处以及改进方法可以弥补这个缺陷,特选取一张真实缺陷与抖动干扰连接的样本图像,通过利用两种方法对这张图像进行消抖处理,将处理结果与理想情况下消抖处理结果进行异或运算,即可以对两种方法进行评价。图5 (b)为理想消除抖动图像、图5(c)为文献[5]提出的方法结果、图5(d)为改进方法结果。将图5(c)文献[5]提出的方法结果与图5(b)理想结果对比可以发现,文献[5]提出的方法会误消除与抖动干扰连接的真实缺陷。将图5(d)改进方法结果与图5(b)理想结果对比可以发现,改进方法不会误消除与抖动干扰连接的真实缺陷,部分未消除的抖动干扰宽度很小,可以在缺陷特征提取时忽略不计。

图5 样本1结果分析
交并比(IoU)也称为Jaccard索引(或Jaccard相似系数),已被广泛用于测量有限样本集之间的相似性。通常,对于两个有限样本集A和B,它们的IoU定义为交集(A∩B)除以A和B的并集(A∪B)[18-20]。
(11)
通过对比文献[5]提出的方法和改进方法的抖动消除结果与理想情况下的交并比,对两种方法进行评价。表2为4个样本图像分别运用文献[5]提出的方法和改进方法得到的结果与理想结果的交并比。通过对比可以发现,改进方法的结果与理想结果的交并比高于文献[5]提出方法的结果与理想结果的交并比,并且达到88%以上,因此,改进方法对抖动消除的效果要优于文献[5]提出的方法。

表2 两种方法交并比对比
4 结束语
本文调研了常见的抖动干扰消除的方法,分析了背景分离图像中抖动干扰的分布性质,针对这些性质提出了一种抖动干扰消除的改进方法。提出的改进方法与常见方法相比,耗时更短,去除抖动效果更优。但是在改进方法中,分割阈值的选取还有待改进,这也是是下一步工作的方向。总体来讲,本文提出的抖动干扰消除方法具有很好的应用前景。
猜你喜欢
电线电缆(2021年3期)2021-07-21 08:37:14
China International Studies(2021年5期)2021-01-03 10:53:41
电线电缆(2018年1期)2018-03-16 02:19:08
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
电焊机(2016年6期)2016-03-06 08:15:37
丝绸(2015年11期)2015-02-28 14:56:50
中华皮肤科杂志(2014年4期)2014-12-19 12:55:43
电视技术(2014年11期)2014-12-02 02:43:28
河南科技(2014年8期)2014-02-27 14:07:51
