航母编队中程防潜警戒舰艇对潜搜索仿真
2020-12-08 07:51王步云孙卫东
指挥控制与仿真 2020年6期
王步云,孙卫东,姜 伟
(海军大连舰艇学院,辽宁 大连 116023)
航母编队中程防潜警戒舰艇是编队对潜警戒体系中的重要一环,部署在潜艇的重点威胁方向上,为航母编队对潜防御提供早期预警。文献[1-2]对中程防潜警戒舰艇的配置方法进行了详细研究,确定了中程警戒舰艇相对航母的距离和方位,但对于舰艇在警戒区内如何开展对潜搜索涉及较少;文献[3]仅对直航搜索下的舰艇行动方法进行了简要探讨,并没有比较分析不同搜索方式优劣,也没有分析各种因素对对潜警戒的影响。
为此采用蒙特卡罗方法,对中程防潜警戒舰艇不同搜索方法下的对潜搜索进行了仿真,比较了不同搜索方法的优劣,定量分析了搜索速度、搜索时间等因素对防潜警戒的影响,为确定中程防潜警戒舰艇的搜索方法提供了依据。
1 航母中程反潜警戒
1.1 航母中程反潜警戒区
航母编队航渡过程中,编队指挥员通常需要根据敌潜艇反舰武器的攻击距离和范围,将航母编队对潜防御体系划分为远程、中程和近程三个对潜防御区域,以构建严密的对潜防御体系。
设置航母中程反潜区的主要目的是防止敌潜艇占领中近程反舰导弹攻击阵位,使用中近程反舰导弹对航母实施攻击,或阻止敌潜艇进一步接近占领鱼雷攻击阵位。担负航母编队中程反潜任务的兵力一般是装备了拖曳声呐的舰艇或舰载直升机,要求警戒兵力能够先敌发现、先敌攻击,及时消除潜艇采用中程导弹攻击航母或进一步突破航母对潜警戒体系的可能。
1.2 舰艇搜索方法
在中程反潜区内,中程防潜舰艇主要使用拖曳声呐进行对潜搜索。然而由于拖曳声呐的工作对舰艇航速有一定要求,而航母编队航速较大,超过了拖曳声呐正常工作速度,为了能对航母本舰保持一个警戒线并且持续为航母提供警戒,舰艇需要采取“高速航行/低速搜索”的蛙跳战术[3],以期望在整个航段内的平均速度能与编队速度一致。
蛙跳就是在某一距离内舰艇以低速进行正常搜索,搜索一定时间后,以高速达到另一点后再开始搜索,是一种类似蛙跳的间断搜索。过程描述如下:首先控制本舰航行速度,根据需要放声呐拖缆入水,待线列阵稳定后,拖曳声呐正式工作,工作一段时间后停止探测,开始回收拖缆;回收完毕后高速航行一段时间至新搜索点,并将速度降至低速,开始放拖缆入水,准备探测,开始新的探测周期[4]。而在具体实施过程中,可以根据需要采用直航搜索、曲线搜索及混合搜索等方式实施,如图1所示。

图1 舰艇三种不同搜索方式
直航搜索是指整个蛙跳搜索期间只有速度变化,航向始终与编队航行方向保持一致。如图1 a)所示。图中段1为放缆阶段,段2为探测阶段,段3为收缆阶段,段4为高速航行阶段(下同)。直航搜索也是目前最为常用的一种搜索方式。
另一种方式是曲线搜索,如图1 b)所示。开始阶段舰艇航向与编队航向偏离一定夹角,在完成第一阶段放缆、探测、收缆后,转向至另一方向高速航行(段4,与编队航向夹角不变),到达新探测点后,再开始第二阶段的放缆、探测、收缆,以此循环。
第3种方式是混合搜索,即结合直航搜索和曲线搜索方法,如图1 c)所示。混合搜索的放缆、探测、收缆阶段与曲线搜索相同,高速航行航向设定为编队航向,以期减小高速航行时间,增加对潜搜索时间。
上述3种方式的优劣如何、指挥员应该如何选择是需要深入分析的问题,此外单个搜索周期内的搜索时间、搜索速度等因素对对潜发现概率的影响也需进一步研究。
2 仿真模型建立
2.1 相关假设条件
为简化仿真要素,假设条件如下:
1)不考虑舰艇加、减速过程以及转弯旋回;
2)隐蔽性是潜艇的生命线,若舰艇发现潜艇,将极大削弱潜艇对航母的威胁,因此舰艇在警戒区内发现潜艇可视为警戒成功,否则视为失败。
2.2 相关模型
1)中程警戒区模型
警戒舰艇的主要职责是在中程反潜警戒区内进行警戒搜索。警戒区大小往往根据航段长度、警戒舰艇能力而定,在仿真中可以将反潜警戒区设定为矩形,其宽度为2倍的舰艇拖曳声呐最大作用距离,长度设定为航母编队航渡对应的航段距离。当航母航行至某一航段终点,警戒舰艇也应航行至终点,与航母同时开始下一个航段,因此警戒舰艇在警戒区内的搜索应是一个单程搜索。
2)潜艇分布模型
潜艇在中程警戒区的初始位置随机生成,航速固定,航向垂直指向航母编队的航行方向,欲突破编队警戒,占领反舰导弹发射阵位,不考虑潜艇深度。
假设反潜警戒区左下角坐标经纬度为(N1,E1),右上角坐标经纬度为(N2,E2),那么潜艇经纬度(NQ,EQ)分别为
NQ=N1+(N2-N1)*rand(0,1),
EQ=E1+(E2-E1)*rand(0,1)
rand(0,1)表示在0和1之间均匀分布的随机数。
3)声呐探测模型
仿真中声呐探测主要考虑被动工作方式,声呐方程为
SL-TL=NL-DI+DT
其中SL为声源级,TL为传播损失,NL为自噪声级,DI为声呐接收机的增益,DT为声呐接收机的检测阈。
其中SL采用如下方式计算:
SL=60lgV目+9lgT-20lgF+34.2
V目为目标航速(kn),T为排水量(t),F为声呐接收机的频率(kHz)。
NL采用如下方式计算:
NL=60lgV-30lgF
V为舰艇航速(m/s),F为声呐工作频率(kHz)。
TL采用如下方式计算:
r为声呐探测距离(km),KL为近场异常衰减。
4)搜索速度、搜索时间和高速航行时间约束模型
在蛙跳工作方式,每个周期内拖曳声呐工作的时间越长,搜索速度越小,高速航行的时间就越长,否则不能持续为航母提供中程警戒。设编队航行速度为Vb,拖曳阵稳定探测的航速为Vt,探测时间为tt,舰艇高速航行的速度为Vg,高速航行时间为tg,舰艇收放拖缆时的航速为Vsf,收放时间之和为tsf。
当警戒舰艇采用直航搜索时,存在如下约束关系:
Vb(tt+tg+tsf)=Vttt+Vgtg+Vsftsf
(1)
与此类似,曲折搜索下存在如下约束:
Vb(tt+tg+tsf)=(Vttt+Vgtg+Vsftsf)·sinβ
(2)
β为曲折搜索时的角度。
在混合搜索时存在如下约束:
Vb(tt+tg+tsf)=(Vttt+Vsftsf)·sinβ+Vgtg
(3)
3 仿真分析
3.1 仿真目的
1)依据成功警戒次数,比较相同条件下,直航搜索、曲线搜索、混合搜索的优劣;
2)分析相同搜索方法下,舰艇单个周期内的搜索航速、搜索时间、曲折角度等因素对成功警戒次数的影响。
3.2 仿真参数设置
1)固定参数设置
设定中程警戒区大小为200 n mile×60 n mile;潜艇在该区域的位置随机分布,航速为6 kn,航向指向航母编队航向;航母编队航速为18 kn;中程警戒舰艇收放缆速度为10 kn,时间为20 min,高速航行速度为30 kn。
有关声呐探测模型参数设置如下: 潜艇吨位T取2 000 t,拖曳声呐工作频率f为0.4 kHz,DI取24 dB,DT取2 dB,KL取5,舰艇舰艏左右20°为盲区。
2)影响因素设置
直航搜索时搜索航速分别取10 kn、12 kn、14 kn、16 kn,单个周期内的搜索时间分别取20 min、30 min、40 min;曲线搜索的搜索航速与时间取值与直航搜索相同,β角分别取75°、60°、45°。混合搜索时的参数取值与曲折搜索相同。
3)高速航行时间计算
根据上述参数,采用式(1)、(2)、(3)计算不同条件下高速航行对应时间,结果如表1~表7所示。

表1 直航时各条件下的高速航行时间 单位:min

表2 β=75°曲折搜索时高速航行时间 单位:min

表3 β=60°曲折搜索时高速航行时间 单位:min

表4 β=45°曲折搜索时高速航行时间 单位:min

表5 β=75°混合搜索时高速航行时间 单位:min

表6 β=60°混合搜索时高速航行时间 单位:min

表7 β=45°混合搜索时高速航行时间 单位:min
3.3 仿真结果分析
每组参数仿真1 000次,将发现潜艇的次数除以仿真次数,得到成功发现潜艇的概率,即警戒成功概率,结果如表8~表13所示。此外由于β为45°时的曲折搜索高速航行时间过长,如表4所示,导致中程反潜警戒舰艇驶出了警戒区,不能为航母编队提供相对稳定的警戒线,因此未对上述情况进行仿真。
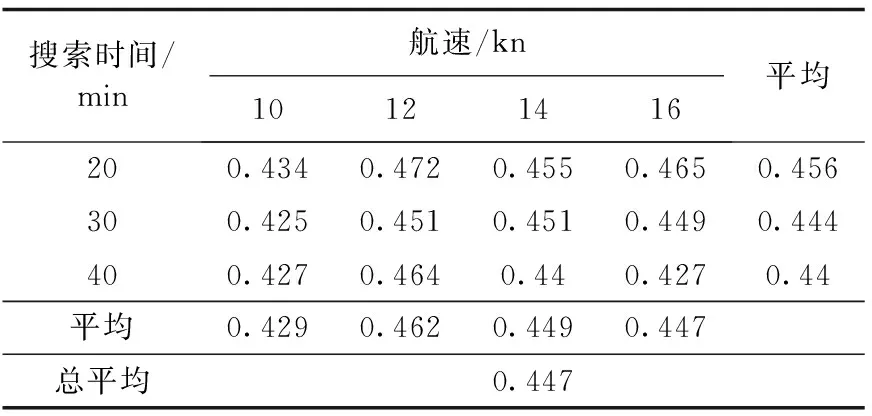
表8 直航时各条件下的成功概率

表9 β=75°曲折搜索时的成功概率

表10 β=60°曲折搜索时的成功概率

表11 β=75°混合搜索时的成功概率

表12 β=60°混合搜索时的成功概率

表13 β=45°混合搜索时的成功概率
1)搜索方式
不同搜索方式,警戒舰艇的搜索宽度不同,累计的搜索时间也不同。曲折搜索下搜索宽度最大、但搜索时间最少,直航搜索下搜索宽度最小,搜索时间最多。从仿真结果可以看出,相同条件下,曲折搜索的警戒成功概率大于直航搜索大于混合搜索。这说明只有搜索宽度增加到一定程度,才能弥补搜索时间减少对警戒成功概率的影响。混合搜索虽然增加了搜索宽度,但还不足以弥补搜索时间的减少,因此其警戒成功次数还不如直航搜索。
2)曲折角度
对比表9和表10看出,曲折搜索下β=60°的概率优于β=75°时,这说明曲折角度取60°更合理,β=75°时搜索宽度的增加不足以弥补搜索时间的减少。此外混合搜索下,β=75°时的警戒成功概率最大,同时也说明不同搜索方式下的最佳曲折角度并不同。
3)搜索时间
从不同搜索时间对应的警戒成功次数来看,单个周期内的搜索时间并不是越长越好,搜索时间越长,对应的高速航行时间越长,越容易出现搜索盲区,反而降低了警戒成功次数。仿真结果也证实了这一点,无论何种搜索方式,单个周期内的搜索时间以20 min为宜。
4)搜索速度
从表中可以看出,尽管不同搜索方式下,最大成功概率对应的搜索速度并不完全相同,但基本分布在14 kn左右,如直航搜索时最佳搜索速度为12~14 kn、β=60°曲折搜索为14~16 kn等,因此可以认为拖曳声呐搜索速度以14 kn为宜。
3.4 仿真结论
综合上述分析,在本文给定的仿真条件下,中程反潜警戒舰艇较优的搜索策略描述如下:以60°的曲折搜索在中程警戒区进行警戒,每个搜索周期的搜索时间为20 min,搜索速度为14 kn。在实际使用过程中还需结合实际的目标威胁环境、水文环境等因素综合确定搜索行动方法。
4 结束语
本文采用蒙特卡罗方法针对中程防潜警戒舰艇的对潜搜索进行仿真,定量分析了不同搜索方法的成功警戒次数,分析了搜索速度、搜索时间等因素对对潜搜索效率的影响,为寻找最佳搜索方法提供了参考。后续将充分考虑潜艇规避对抗等要素,研究不同编队速度、不同警戒区大小等条件下的最佳警戒方法,为指挥员决策提供更为全面的依据。
猜你喜欢
军事文摘(2022年17期)2022-09-24
舰船科学技术(2022年11期)2022-07-15
民用飞机设计与研究(2020年4期)2021-01-21
数字海洋与水下攻防(2020年5期)2021-01-04
海军航空大学学报(2019年1期)2019-04-29
现代兵器(2016年12期)2016-12-22
求学·理科版(2016年3期)2016-03-23