
手持式激光雷达观测玉兰物候期叶倾角变化
2020-12-05 01:55:18孙统漆建波黄华国
遥感信息 2020年5期
孙统,漆建波,黄华国
(北京林业大学 林学院,北京 100083)
0 引言
植被主要通过叶片进行光合作用,其光能吸收强弱决定了冠层生产力[1]。影响叶片光能吸收的因素有叶面积大小、叶倾角分布、光能转换效率等。其中,叶倾角分布的影响最为复杂,它关系着植被冠层对太阳辐射的削弱作用以及太阳辐射穿透植被冠层的概率,定量表达为消光系数和孔隙率。常利用消光系数和孔隙率并根据比尔定律来估测冠层叶面积指数[2]。因此,深入了解植被冠层叶倾角分布对理解太阳辐射传输和植被生理过程具有重要意义。
叶倾角定义为植株叶片平面与水平面的夹角,常用叶片法向量与垂直方向夹角计算求得。叶倾角的测量方法基本可以分为直接测量和间接测量2类。直接测量精度较高,但费时费力:利用量角器、尺子、罗盘组成的简单仪器逐叶片测量[3];或者由高精度电位器和机械臂组成的机械装置进行测量[4]。基于图像的间接测量方式快速方便,但也需要搭建平台以拍摄不同角度照片[5]。近年来,激光雷达的快速发展为叶倾角的准确测量提供了一种新的技术途径。
对于激光雷达来说,不同的数据获取平台和扫描方式决定了所获取的三维点云数据在采样间距、密度和所包含结构细节的丰富程度等方面差异明显。林业上常用的地基激光雷达分为全方位扫描和线阵扫描2类,全方位扫描仪视场广、分辨率高,但仪器本身较为笨重、扫描时间长;线阵扫描仪垂直视场窄、分辨率较低,但优势在于仪器轻便,作业速度快。线阵扫描仪结合SLAM(simultaneous localization and mapping)算法进行实时拼接,理论上也可以实现近似全方位扫描仪的效果[6]。目前,市场上已有成熟的此类产品出现,而以此来研究植株叶倾角的实验尚未发现。
许多研究表明,植株叶倾角分布在不同冠层高度[7-8]、光照环境[9-11]和生长季节[12-13]下可能会有差异。差异原因主要在于物理和生物2个方面,如树干结构、树枝倾角、叶柄形变、生长过程、向光性、重力和风等诸多因素[14]。本文通过手持式激光雷达对玉兰物候期叶倾角变化进行观测,并与手工测量进行对比以验证该方法的准确性,在此基础上利用激光雷达所测叶倾角探究了玉兰不同冠层高度在不同时期的叶倾角分布变化规律。
考虑到拼接点云数据可能存在的偏差,首先对比手工测量和点云计算2种不同方式提取的叶倾角数据,较好的一致性是进一步分析的前提;然后比较不同层次叶片在不同时期的平均倾角和分布特征,并结合实际情况做出合理解释;最后分析该方法存在的误差原因,说明当前叶倾角定义在研究过程中的局限性。
1 材料和方法
1.1 研究对象
以北京林业大学校园内生物楼前一株玉兰树为研究对象,胸径23.5 cm,树高约15 m。树冠近似圆锥体,长势良好。
玉兰(MagnoliadenudataDesr.),为木兰科、木兰属落叶乔木。叶纸质,宽倒卵形或倒卵形,先端突尖,长10~18 cm,宽6~12 cm。花先叶开放,花期为3~4个月。落花后开始进行物候观测以及数据采集工作,不同时期植株照片见图1。可以看到在4月中旬至5月中旬,玉兰叶片生长变化明显,之后逐渐趋于稳定。
1.2 数据获取
本实验所用激光雷达仪器为美国KAARTA公司的Stencil系列产品,型号为2-16,具体参数见表1。Stencil系列集成KAARTA 3D SLAM技术,标配一个特征点捕捉相机,在算法上结合激光扫描的点云数据和摄像头采集的影像数据,从而保证其自主定位和数据拼接效果。

表1 手持式激光雷达仪器参数
选择晴朗无风天气下进行扫描,3次观测日期分别为4月11日、5月10日和6月17日。相比其他地基激光雷达仪器,Stencil产品不需要复杂的架设仪器及数据拼接过程,使用方便,效率极高。采样前首先连接主产品、蓄电池与显示器。开机后进行初始化特征点捕捉操作,初始化完成后即可开始测量。此时可以断开显示器连接,手持主体和蓄电池绕树行走进行扫描。由于激光雷达视场角较小,扫描时应注意拉远距离并抬升仪器角度以获取冠层上部信息。行走3至4周,并不断变换位置和角度,以尽可能获取完整植株信息。扫描完成后自动处理并保存,整个过程耗时在10 min以内。
手工测量叶倾角所用工具由一把带臂量角器和一根铅垂线组成。铅垂线有2个作用:一是保证工具处于竖直方向,量测时应使垂线紧贴量角器同时又不至于弯折;二是充当指针,对应刻度与90°的差值便为叶倾角。尺臂不仅可以用来手持,也可以在叶片间隙较小时伸入,以避免碰触枝条。测量方法如图2所示。

图2 激光雷达仪器与手工测量工具
为验证点云提取叶倾角精度,在6月17日激光雷达扫描后同时进行手工测量工作。由于树木较高,只能在下层进行取样。实测选择的叶片需要与点云精确对应,因此在测量时还需拍摄多张照片辅助后期判别。舍弃了个别由于自身晃动造成点云判别不清的叶片,最终保留24片叶子实测数据。
1.3 数据处理
使用CloudCompare软件对3期点云数据进行处理操作:首先剔除周围环境,只保留目标玉兰树;然后将玉兰树冠按高度平均分为上中下3层,考虑到上层树冠逐渐减小,采用分层随机抽样时上层选择30片叶子,中层40片,下层50片。为降低人为选择的主观性,将上中下3层分别再均分为3、4、5个小块区域,每小块区域选择10片,尽可能保证均匀随机分布(图3)。3期叶片均为独立随机选取,并不是相同叶片。

图3 点云数据(整株与部分提取叶片)
以目视勾绘的方法选择叶片,每片叶子选择完成后,使用软件中的平面拟合工具进行拟合,得到拟合平面法向量(x,y,z),进而通过公式(1)计算求出叶倾角θ。
(1)
2 结果与分析
2.1 点云计算与手工实测数据对比
以24片叶子手工实测叶倾角为验证数据,在与点云一一对应后,对比点云计算角度与手工实测角度。如图4所示,相关系数R2为0.78,均方根误差(root mean square error,RMSE)为6.09°。虽然拟合优度可能略低于其他一些叶倾角实验,但其他实验多采用精度更高的全站扫描仪获取数据[15-16]。本文的研究对象是室外的高大成熟植株,而不是幼树或者室内的假树,对象本身和室外环境的复杂性都增加了实验结果的不确定性。
由图4可以看到,回归直线近乎平行1∶1线,走势非常稳定,2种方法得到的叶倾角均值相差2.8°(点云计算:27.3°,手工实测:24.5°),这也证明了本文测量和计算方法的可靠性。在之后不同层次叶倾角均值的对比中,所选叶片至少有30片。随着样本数量的增加,结果会更具说服力。因此,该实验方法的精度能够基本满足本文深入分析的要求。

图4 手工实测和点云计算结果对比
2.2 不同高度层叶倾角变化
不同时期树冠各层次根据点云计算的叶倾角均值见表2。最大值为6月17日下层(28.6°),最小值为同日上层(16.9°),其他数据多为20°~25°。从日期上看,4月11日叶倾角为下层<中层<上层,上层与下层相差接近5°;5月10日不同层次叶倾角相差较小;6月17日叶倾角为下层>中层>上层,上层与下层相差超过10°。从层次上看,下层叶倾角随时间变化逐渐增大,而中层和上层逐渐减小,其中上层变化幅度高于中层和下层。对于植株整体来说,叶倾角均值几乎不变。
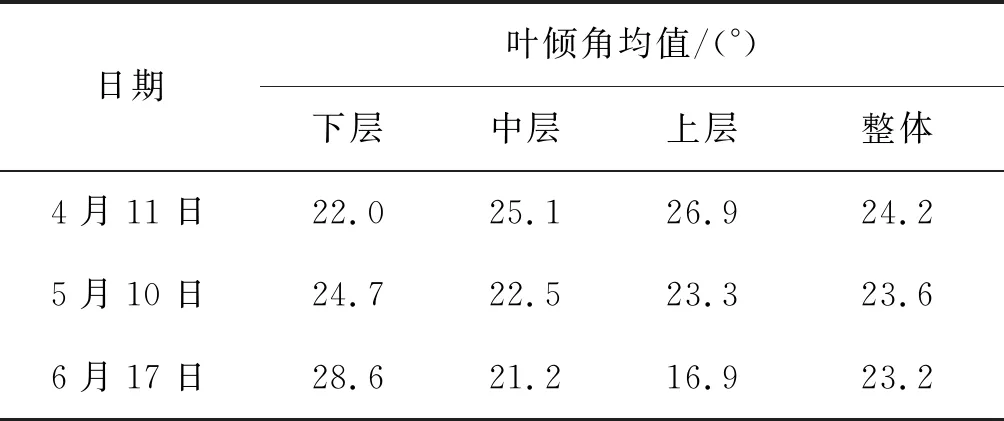
表2 不同时期各层次叶倾角均值
比较整体叶倾角分布,不同时期差异较小(图5)。4月11日叶倾角分布峰值出现在20°~30°区间,而后来2次出现在10°~20°区间。10°~30°在3次观测中一直是分布最多的区间。

图5 整株叶倾角分布直方图和累计概率分布图
本实验中,同一植株不同层次叶倾角在物候期呈现出不同的变化规律,原因在于树木实际形态和当前叶倾角定义。研究对象树冠为圆锥型,顶端聚拢,底部平铺。配合照片和点云仔细观察发现树冠上层叶片多“上扬”,下层叶片偏“下垂”,中层叶片则“混杂”。在叶片生长物候期内,体积和重量逐渐增加,受重力影响也愈发明显。最终抑制上层叶片“上扬”(叶倾角变小),促进下层叶片“下垂”(叶倾角变大),中层叶片2种作用抵消(叶倾角变化不明显)。但是当只比较叶倾角大小时,就会把叶片向上生长和向下生长等同视之,因而忽略了变化的实质原因。
3 讨论
3.1 误差分析
本文的实验对象是校园内的一株高大成熟、长势良好的玉兰树,尽管每次实验都尽量选择在无风天气下进行,但实际上很难保证完全无风。叶片受气流的影响远大于人所能感知的程度,即使是细微的气流扰动,也会造成叶片的上下漂移,反映在点云上便产生了“厚度”,使得叶倾角点云计算误差变大。
受限于激光雷达自身穿透力不强的性质,在叶片密集或树冠内部区域,较难获取到完整的点云数据。因此,本文中获取的实验数据只反映了大部分被采样冠层区域的叶倾角分布特征。该影响同样表现在树冠上层信息的获取上。因为环境限制,采集数据时不可避免会受到周围树木遮挡,并且距离较远,最终造成树冠上层点云密度明显小于中下层。当点云密度较小时,勾绘叶片需要的主观判断更为明显,增加了结果的不确定性。
另外,虽然相比其他树种,玉兰叶片较为平整,但卷曲、弯折现象仍较为普遍。对于存在一定曲率的单个叶片来说,叶倾角反映的是平均倾角。通过点云拟合平面时,可以自动选择均方根误差最小的平面,进而根据法向量计算叶倾角。手工测量则需要人为判断,并且不能触碰叶片,还要满足贴近叶片、保持垂直等测量条件。种种因素让手工实测叶倾角始终是一种理论简单,但操作困难且结果并不十分精确的验证方法。
3.2 叶片上下倾问题
叶倾角定义为叶片平面与水平面的夹角,范围从0°到90°。本文中的实验数据也是在此定义下采集并分析的,然而在详细描述不同物候期植株叶倾角变化过程中,此定义存在一定局限性。原因在于叶片有正反面之分,正面(上表面)叶绿素较多,用来进行光合作用;而背面(下表面)气孔较多,用来控制水汽交换。叶片正面的不同朝向决定了不同倾斜方式对太阳光能的利用效率并不相同,以单个枝条的简化图示意(图6(a)),左侧上倾分布方式对于光能吸收效率低于右侧下倾分布方式。
需要注意的是,前文提到的叶片向上生长和向下生长并不完全等同于产生不同光能吸收效率的上倾和下倾。向上生长和向下生长说明的是叶梢和叶基的相对位置,而对于整个植株来说,上倾和下倾需要通过观察叶片正面是否朝向树干中心轴来判断。比如有些向上生长的叶片同样产生了下倾的效果,如图6(b)红圈内所示。
利用植物叶片正面向上的特性,结合激光雷达获取三维结构信息的优势,提出一种应用于点云数据判断叶片上下倾的通用方法:分离叶片点云,确定各个叶片距离树干中心轴的最近点和最远点,如果最近点垂直高度高于最远点,则为下倾;反之则为上倾。随着激光雷达硬件和算法的不断完善,该方法可为实现激光雷达自动化区分并提取叶片上下倾角提供参考,并为叶片上下倾的深入研究奠定基础。

图6 2种倾斜方式叶片示意图
4 结束语
叶倾角分布作为关键的冠层结构参数,对植被冠层光线传输过程和光合有效辐射分布具有十分重要的影响。本文通过手持式激光雷达探究玉兰不同冠层高度在不同时期的叶倾角分布变化规律,主要结论概括如下。
1)相比全方位扫描仪,手持式激光雷达配合SLAM算法在数据采集速度方面具有明显优势。虽然精度略低,但已可以基本满足观测叶倾角的要求。
2)玉兰在叶片生长期(4—6月)受重力影响,上层树冠平均叶倾角逐渐减小,下层逐渐增大,中层变化相对较小,整株平均叶倾角几乎不变。
3)由于叶片正反面功能不同,相同叶倾角的上倾下倾朝向不同对于光合作用的影响也不相同。激光雷达具有自动化区分并提取叶片上下倾角的潜力。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
汽车观察(2021年8期)2021-09-01 10:12:41
大气科学(2021年1期)2021-04-16 07:34:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
数学杂志(2017年3期)2017-06-15 20:29:14
农业环境科学学报(2017年2期)2017-03-20 14:57:37
少年文艺·开心阅读作文(2017年1期)2017-02-24 03:05:29
