融合重力信息的似大地水准面精化模型
2020-12-04 02:17沈鑫胡伍生
山东交通学院学报 2020年4期
沈鑫,胡伍生
东南大学 交通学院,江苏 南京 211189
0 引言
全球导航卫星系统(global navigation satellite system,GNSS)测量精度高、效率高,在工程实践中得到越来越广泛的应用。GNSS测量获得的高程为大地高HGNSS,起算面为椭球面。椭球面与似大地水准面不重合,大地高和正常高HNor之间存在高程异常ζ,计算公式为:
ζ=HGNSS-HNor。
(1)
GNSS测量获得的HGNSS已经具备较高精度,但工程中一般采用HNor,所以限制GNSS高程测量应用的主要因素是高程异常ζ的精度,似大地水准面的精化问题亟待解决[1-3]。
似大地水准面模型有多种[4-6],其中二次多项式模型简单、拟合精度良好,应用广泛。本文以二次多项式模型为基础模型,提出一种融合重力信息的多项式模型,并利用神经网络的方法提出了融合重力信息的误差反向传播(error back propagation,BP)神经网络模型,对比分析两种模型的拟合精度。
1 二次多项式拟合模型
在常规的似大地水准面模拟方法中,模型自变量为经度和纬度,因变量是这一点上的ζ。文献[7]对似大地水准面模型的二次多项式拟合模型为:
ζ(x,y)=a0+a1x+a2y+a3x2+a4xy+a5y2
,
(2)
式中:a0为常数项,a1、a2、a3、a4、a5分别为经度、纬度及其二次项系数,x为经度,y为纬度。
因为ζ的变化与地理位置紧密相关,所以这种建模方式及参数的选取十分合理,是我国推荐采用的似大地水准面拟合手段。其建模参数较少,具备多余观测,可利用平差检验粗差点,即具备较好的抵抗粗差的能力。这种建模方式受个别ζ的影响较小,具备拟合多种地形条件的能力。
本文中二次多项式模型作为对比参照的基准,记作模型A。
2 融合重力信息的多项式模型
由于过去重力信息匮乏且精度不高,常规模型未将重力异常数据作为参数加入似大地水准面拟合模型中。重力异常数据是影响似大地水准面的因素之一,将其引入似大地水准面精化模型中,有利于提高模型的精度[8]。
利用重力恢复与气候试验(gravity recovery and climate experiment,GRACE)卫星跟踪数据、卫星测高数据和地面重力数据等多源数据建立地球重力场模型(earth gravitational model,EGM)2008。EGM2008的均方根误差为±11.137 cm,EGM2008的外部检核表明,EGM2008在全球范围内的误差为±13.0 cm,在美国的误差为±7.1 cm,在澳洲的误差为±26.6 cm。因此可以确定EGM2008在全球具有很高的精度。
在融合重力信息的二次多项式模型进行似大地水准面精化过程中,需要获取每一个试验点位的重力异常数据,而EGM2008提供网格点上的重力异常数据,所以需对EGM2008数据进行内插处理。
以常规二次多项式模型为基础,加入重力异常数据参数后得到一种融合重力信息的多项式模型:
ζ(x,y,g′)=a0+a1x+a2y+a3x2+a4xy+a5y2+a6g′+a7g′2
,
(3)
式中:g′为重力异常数据,a6、a7分别为重力异常数据的一次项和二次项系数。
式(3)在式(2)的基础上添加了重力异常数据的一次项和二次项,获得融合重力信息的多项式模型,记作模型B。
3 基于神经网络的融合模型
随着人工智能的发展,神经网络方法在模型拟合精化方面的应用越来越广泛[9-12],本文即在模型B的基础上,提出一种基于神经网络的融合模型。
3.1 神经网络BP算法
BP算法是一种基于样本训练,自我学习调整的神经网络模型,该模型自20世纪70年代提出以来,经过几十年的发展,已经被证明适用于多个领域。BP神经网络模型结构如图1所示。
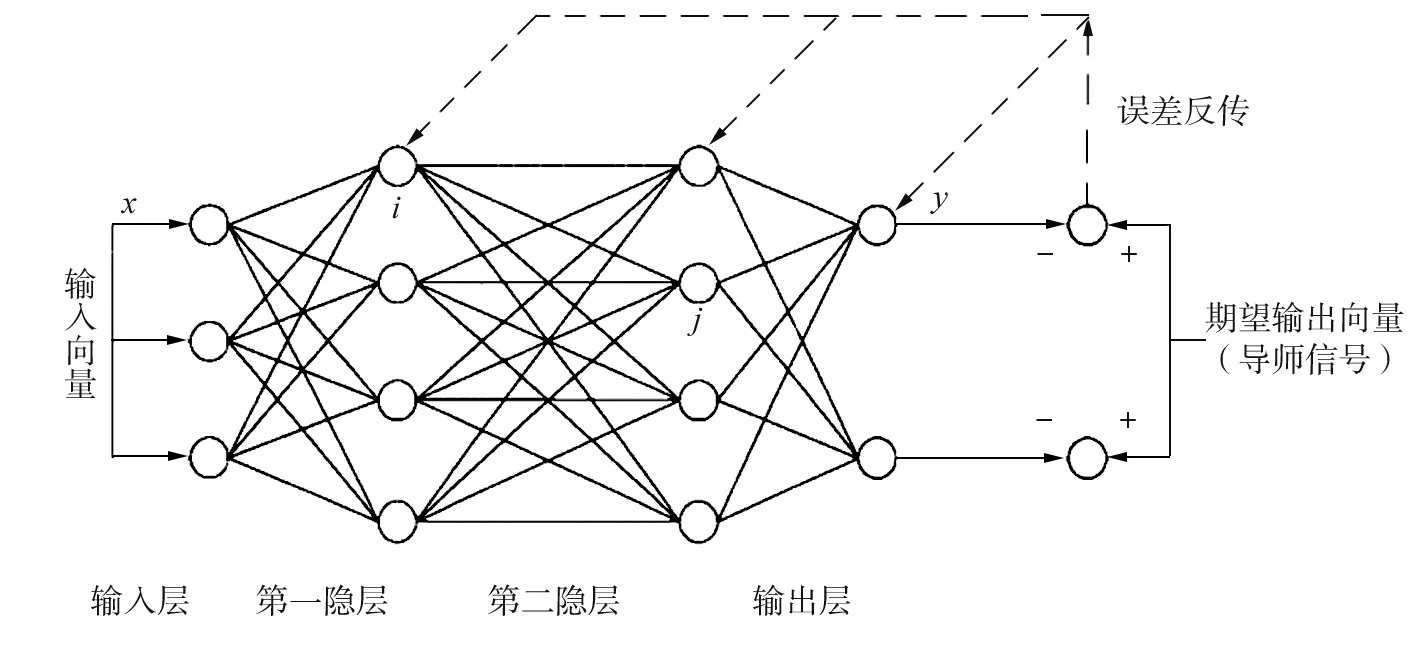
图1 BP神经网络模型结构
由图1可知,BP神经网络主要由输入层、隐含层和输出层3部分构成。输入向量和输出向量对应常规模型中的自变量和因变量。BP神经网络需要训练建模,训练过程分为正向传播过程和误差反向传播过程。正向传播过程中,输入向量经过与权值矩阵的运算,进入多层隐含层,隐含层之间均由权值矩阵连接,直至所有隐含层运算结束,得到输出结果。输出结果与期望输出结果的误差作为训练信号,对权值矩阵进行逐层调整,使输出结果的误差变小。通过多个样本的学习,BP神经网络可以得到合适的权值矩阵,输入向量经过传播运算即可得到达到期望精度要求的输出向量。这既是BP神经网络的学习过程,也是建模过程。用试验数据检验BP神经网络的学习成果,即可判定学习效果[13-15]。

图2 融合重力信息的BP神经网络模型结构图
3.2 融合模型
基于神经网络的8参数融合模型如图2所示。
图2融合模型的输出层参数除了代表二次多项式参数的x、y、x2、y2和xy外,加入了代表重力异常数据的一次项和二次项g′和g′2,还加入了ζB,是由模型B计算得到的ζ估计结果。输出参数为ζ-ζB,是模型B拟合似大地水准面的残差,记作模型C[16-19]。
在输入层加入ζB是因为模型B的综合性质优良,即综合了二次多项式和重力信息,对模型精化有增益效果[20-23]。
输出层参数变为残差输出参数ζ-ζB,只是原输出参数减去ζB即为原输出参数高程异常。模型B可使似大地水准面的拟合精度较高,即拟合残差ζ-ζB远小于ζ。神经网络数据处理软件在计算前对数据进行归一化处理,使结果相对较小,因此预处理数据有益于模型精化[24-25]。
4 工程实例分析
4.1 试验数据的来源与处理
试验数据来源于某地区,原始数据包含经度、纬度,重力异常数据由EGM2008地球重力场数据内插计算获得,如图3所示。
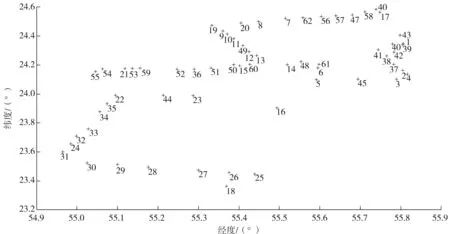
图3 工程实例点位分布图
工程中共有62个点位。试验地区经度跨度为0.853°,纬度跨度为1.221°,工程面积接近10 000 km2,其成果可供市级似大地水准面精化参考。为保护数据源,已对原始数据进行加密处理,但不影响分析结果。
为确保试验有效性,首先筛选原始数据。试验中利用中误差判断数据质量,各点位ζ均为已知,故得到中误差
(4)
式中:Δi为真误差,即模型估计值与实测ζ之差;n为参与建模的点位个数。
用本试验的全部数据建立模型A,得到全部点位ζ的拟合结果,计算m,剔除点位误差超过3倍m的点。经粗差剔除,去掉3号和19号点,得到60个试验点,均匀选取其中20个作为基准点,用来建立不同的模型,其余40个点作为检验点,用来比较不同模型的拟合效果。
4.2 模型建立与检验
4.2.1 模型A
模型A采用Matlab软件建模,得到基准点与检验点残差如表1、2所示。
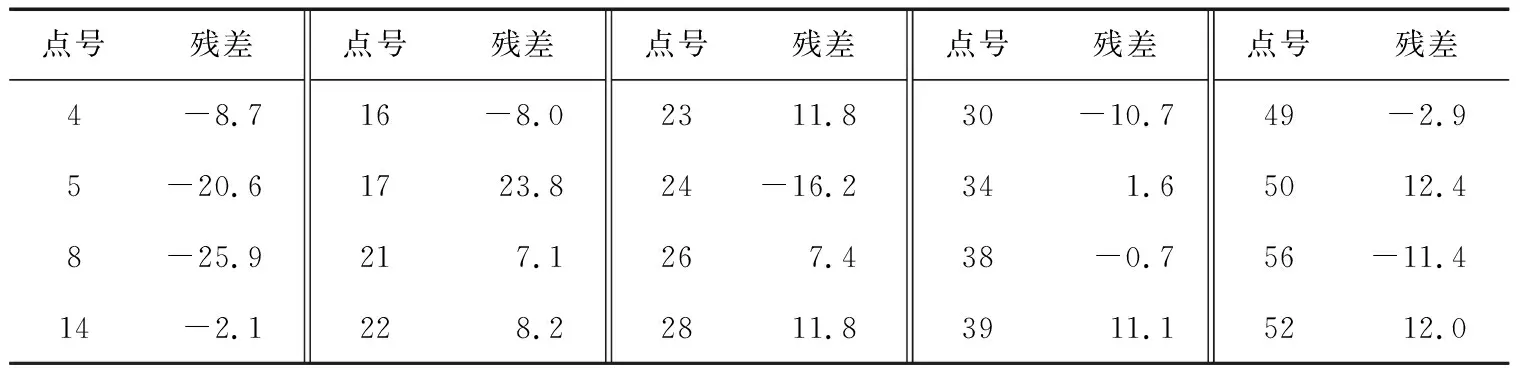
表1 模型A基准点残差 cm
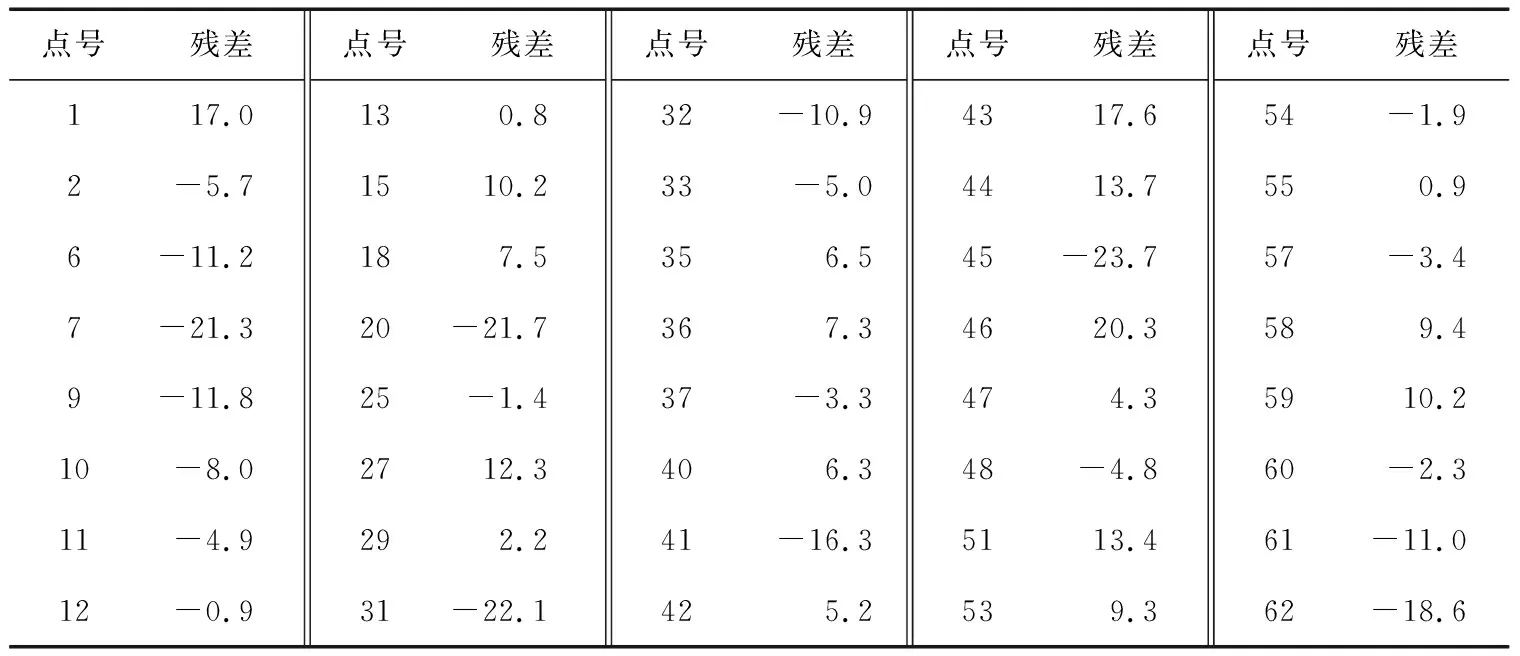
表2 模型A检验点残差 cm
由表1可知:在二次多项式模型基准点中, 38号点的残差的绝对值最小,残差为-0.7 cm; 8号点的残差的绝对值最大,残差为-25.9 cm,m=12.6 cm。
由表2可知:在二次多项式模型检验点中,13号点残差的绝对值最小,为0.8 cm;45号点残差的绝对值最大,残差为-23.7 cm,m=11.7 cm。
4.2.2 模型B
模型B采用Matlab软件建模,得到基准点与检验点残差如表3、4所示。
由表3可知:在融合重力信息多项式模型基准点中,52号点残差的绝对值最小,残差为0.3 cm;50号点残差的绝对值最大,残差为7.6 cm,m=3.8 cm。由表4可知:在融合重力信息多项式模型检验点中,18号点残差的绝对值最小,为0.2 cm;41号点残差的绝对值最大,残差为-15.7 cm,m=4.3 cm。
4.2.3 模型C
模型C采用神经网络数据处理软件建模,在输入文件中,输入层参数为x、y、x2、xy、y2、g′、g′2、ζB,输出层参数为ζ-ζB。
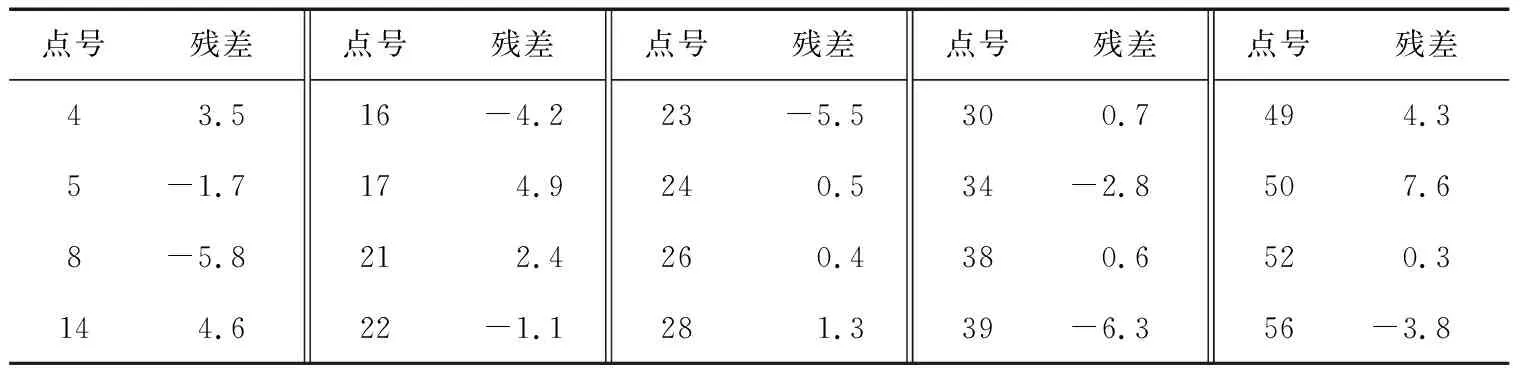
表3 模型B基准点残差 cm

表4 模型B检验点残差 cm
神经网络学习的随机性质(连接权值矩阵的随机初始化)决定每一次的学习结果在一定范围内波动。所以评价一个神经网络的学习效果时,不仅要估计其拟合精度,也要考虑其稳定性,在参数设置相同的条件下,其多次拟合结果之间的差别应较小。
神经网络数据处理软件设置了多项可调参数,根据参数意义和神经网络模拟试验表现进行具体调节,应用相同的基准点和检验点数据,在进行了约100次神经网络模拟试验后,得到最优设置参数如表5所示。

表5 模型C最优设置参数
以表5的最优设置参数进行10次试验,其拟合结果如表6所示。

表6 模型C的试验结果cm
由表6可知:10次试验的基准点平均中误差为1.7 cm,检验点平均中误差为3.9 cm,因为检验点平均中误差与第10次试验十分接近,而检验点中误差是评价似大地水准面精化水平的重要指标之一,故选取第10次试验数据作为参考,模型C基准点及检验点的残差如表7、8所示。
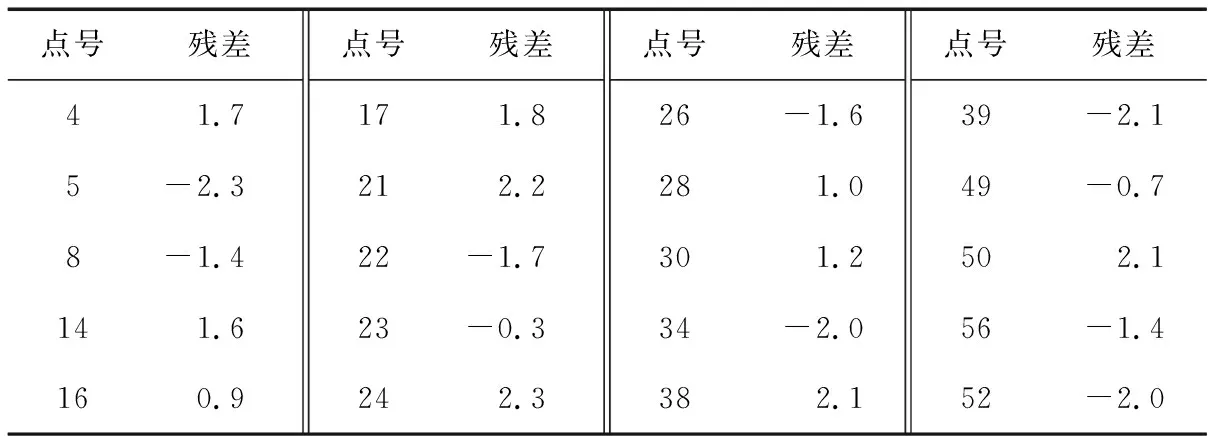
表7 模型C基准点残差 cm
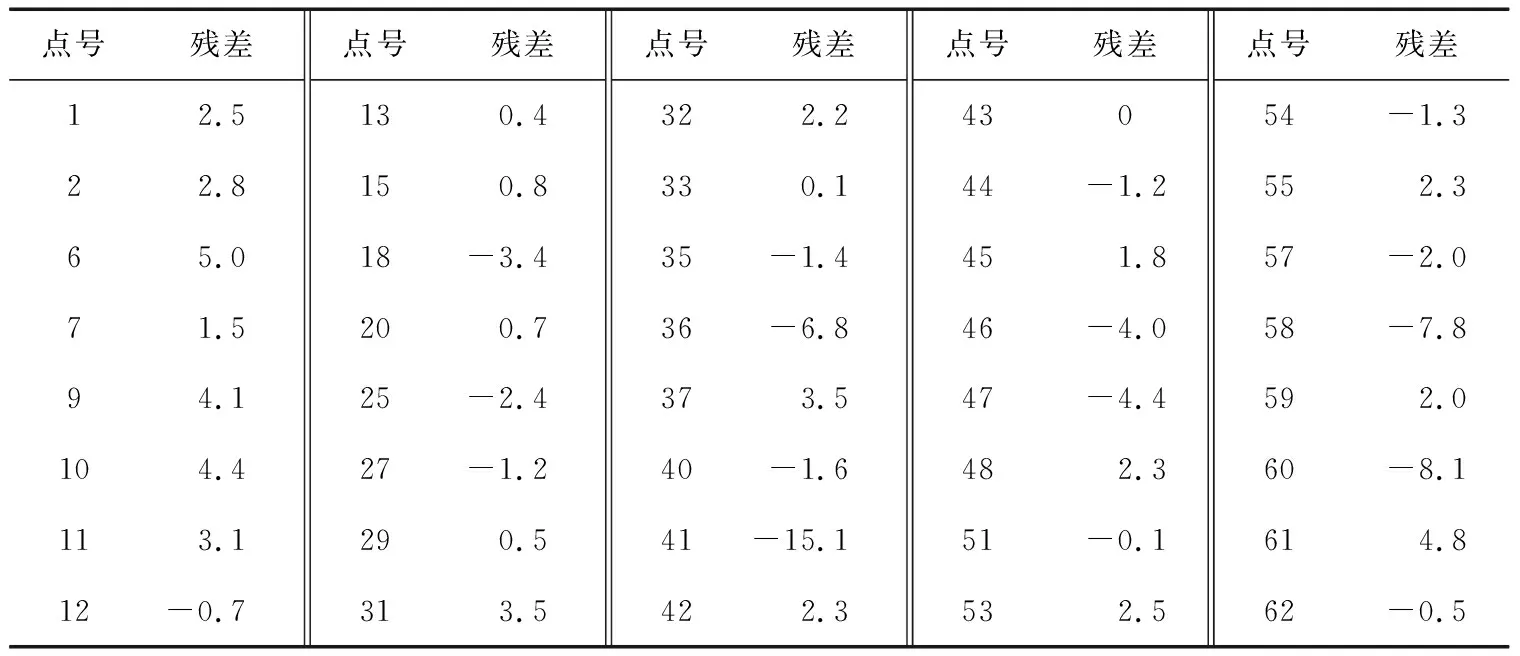
表8 模型C检验点残差 cm
由表7可得:23号点残差的绝对值最小,残差为-0.3 cm;24号点残差的绝对值最大,残差为2.3 cm,m=1.7 cm。由表8可得:43号点残差的绝对值最小,残差为0;41号点残差的绝对值最大,残差为-15.1 cm,m=4.0 cm。
4.3 拟合效果对比分析
对比3种模型的拟合精度可知,以检验点中误差为准,模型B的精度比模型A提升约60%,模型C的精度比模型A提升约65%,说明EGM2008数据对似大地水准面的精化有明显的提升效果,但神经网络的方法提升效果更好。
5 结论
1)EGM2008重力异常数据与ζ关系紧密,因此,在似大地水准面的二次多项式拟合模型中加入EGM2008重力异常数据,能明显提升模型的拟合效果。
2)以二次多项式拟合模型为基础建立的2种似大地水准面精化模型均有较好的拟合效果,其中应用融合重力数据的BP神经网络8参数模型的拟合精度可提升65%,应用效果良好,有一定的推广价值。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
北京航空航天大学学报(2020年10期)2020-11-14
神州·下旬刊(2020年5期)2020-10-21
自动化学报(2019年6期)2019-07-23
山东工业技术(2017年24期)2017-12-29
中国惯性技术学报(2015年1期)2015-12-19
商品与质量·消费研究(2013年6期)2013-08-06
城市建设理论研究(2012年6期)2012-04-10