
海南热区香蕉地预破土凿式深松机设计与试验
2020-12-03 02:16张喜瑞汝绍锋张秀梅
农业工程学报 2020年18期
张喜瑞,张 锐,汝绍锋,张秀梅,李 粤,梁 栋
海南热区香蕉地预破土凿式深松机设计与试验
张喜瑞,张 锐,汝绍锋※,张秀梅,李 粤,梁 栋
(海南大学机电工程学院,海口 570228)
针对海南热带农业区香蕉地现有深松机具匮乏、松土质量差等问题,该研究研制了一款预破土凿式深松机,首先确定整机深松方式,并采用三维建模方法建立深松机整体模型;进一步确定了深松机的整体结构与工作原理,并设计阐述了深松机的关键结构参数。基于田间试验,对深松作业后的土壤坚实度及土壤容重进行测定,确定了前进速度、深松深度、破土刃入土深度为对土壤坚实度及土壤容重有显著影响效果的因素。进一步以土壤坚实度及土壤容重为响应值,基于Box-Behnken设计试验得到响应值与显著性参数的二阶回归模型,并针对显著性参数进行寻优,得到最佳组合:前进速度为1.15 m/s、深松深度为350 mm、破土刃入土深度为250 mm。在标定的最优参数下进行的田间验证试验结果表明,土壤坚实度为752 Pa,土壤容重为1.48 g/cm3,与预测值(734 Pa、1.42 g/cm3)之间的误差分别为2.4%、4.2%,验证了分析的可信性。最后通过与现有传统深松机具开展的对比试验得出:相较于传统深松机具,预破土凿式深松机作业后,土壤坚实度下降6.39%,土壤容重下降9.76%,进一步证明该试验研制样机适用于海南热区香蕉地深松作业,该机器的设计可为海南热带地区香蕉地深松技术的推广与应用提供参考。
农业机械;设计;试验;深松机;香蕉地;凿式
0 引 言
土壤耕层自上而下分为3层,分别为耕作层、犁底层和黄土层,长期传统耕作过程中,耕作层受犁铧等耕作部件挤压作用,不断压实形成坚硬的犁底层[1-2]。犁底层一般距离地表120~180 mm,厚度约为80~100 mm,且土壤容重较大、总孔隙度较小[3]。犁底层阻碍了耕作层和黄土层之间的水分流动和能量传递[4]。通过深松技术,可在维持原有状态和肥力的前提下,打破犁底层,保持土壤耕作层结构不变,改善农作物生长所需土壤环境,因此可以大幅度增加深根系作物的产量。2016年,中央一号文件提出要高度重视农机深松整地工作,并将其列入《政府工作报告》年度重点工作任务[5],因此深松机具及其关键技术的研究进入快速发展机遇期。
香蕉作为热带地区广泛种植的水果之一,在世界水果贸易市场中占有重要的地位,是中国农业经济发展中不可或缺的一环[6-8]。目前,为增加香蕉产量、提高香蕉质量,香蕉种植多采用“两年一种”模式[9],短周期的香蕉种植模式与香蕉地传统的耕作模式相结合,大大增加了农机具的工作次数,因不合理的农事操作,耕作层的泥土被不断压实,导致犁底层厚度增大、容重增加且较为封闭,进而导致耕作层变浅,影响作物根系深扎,不利于香蕉的生长和生产[10-11]。目前,由于香蕉种植的区域性特点,香蕉地专用深松机具的开发研究较薄弱,传统的深松机具作业普遍存在深松后土壤质量差等问题,严重制约深松技术在热带农业区的推广应用。
在国内,邓衍夫等[12]研发了一款振动式深松整地一体机,该机可降低深松阻力,但系统能耗高。为解决秸秆随意丢弃覆盖田间的耕地问题,凯斯纽荷兰公司[13]研发了一款730C联合深松整地作业机,该机可打破犁底层,增强土壤蓄水保墒能力。李成鑫[14]设计了一种深松整地联合作业机,通过加设大波纹圆盘刀,进而达到减阻效果。基于仿生原理,张强等[15]研制了一款仿生钩形深松铲,相较于传统深松铲,该铲工作时阻力明显减小。郑侃等[16-17]设计的反旋深松联合作业整地机,可一次完成深松、旋耕、镇压等工序,该机可提高耕深稳定性、植被覆盖率,且牵引阻力降低了16.21%。在国外,Jankauskas等[18-19]通过试验研究出一种适用于黏性土壤的深松铲结构材料;Askari等[20]研发了一种翼板前倾角为10°的新型带翼深松铲,试验表明,安装该铲的机具作业时可明显降低牵引阻力。
综上,国内现有深松机具种类繁多,但主要针对于北方地区玉米、小麦等作物,且更适用于地块平整、土壤比阻小的耕地。南方热区多为砖红壤土且土层黏重,现有研究主要集中在甘蔗地,如李柏林等[21]对甘蔗地凿式深松犁的角度参数进行了一定优化设计,重点分析了犁柄倾角、入土角、入土隙角等参数对深松阻力的影响;韦丽娇等[22]研制了1SG-230 型甘蔗地深松旋耕联合作业机,能同时完成深松和旋耕作业。当前针对香蕉地深松机具研究较少,且主要致力于降低深松阻力[23]。本文针对香蕉地现有深松机具松土质量差等问题,研究设计一种预破土凿式深松机,并对深松后的土壤理化特性进行测定,以期为热带地区香蕉地深松机具松土质量差提供解决方案。
1 设计方案与整体结构
1.1 深松方式的确定
目前,深松机具按作业方式主要分为全方位深松和间隔深松。全方位深松作业后,耕深内土壤疏松程度高,但动力消耗大,对土壤扰动大,且效率低;而间隔深松作业后,可在土层中形成“虚实并存”的耕层构造[24]。其中,经过扰动的疏松土壤称为“虚部”土层,包含大量的大孔隙,可实现水分的迅速下渗,形成整个耕作层的“蓄水库”[25];未经扰动的紧实土壤称为“实部”土层,包含较少的大孔隙,内部通气性较差,从而促进了厌氧生物的活动,同时可实现协调水分供给的功能[26]。由于香蕉根系具有好气性、喜湿性和喜温性,同时考虑到海南热区香蕉地多为砖红壤土,黏性大且比阻大[27],设计深松机时应尽量保证小机型、结构简单、使用方便。综上所述,本研究采用小型凿式间隔深松的方式设计海南地区香蕉地深松机。
1.2 整机结构与技术参数
所研制的预破土凿式深松机主要由三点悬挂装置、机架、深松铲、破土装置和限深轮等部件组成。整机通过三点悬挂装置挂接于拖拉机上,由拖拉机牵引拖动完成作业过程。拖拉机动力输出轴通过万向节、变速箱、传动装置将动力传递给破土装置,预先切开土壤,最后深松铲在拖拉机的带动下完成深松作业。破土装置设置在深松铲前方,由破土刃及连接杆组成,其中破土刃是破土装置的关键工作部件。整机主要性能参数如表1所示。预破土凿式深松机如图1所示。

表1 预破土凿式深松机主要性能参数
2 关键部件结构设计
2.1 深松松土机理
当前深松铲主要类型有斜柄式和直柄式,其中斜柄式深松铲在不断前进工作的过程中,铲尖将土壤向上向前挤压,同时斜置的深松铲柄不断抬升土壤,使土壤受拉伸应力而破碎,故本次研究设计深松机选用斜柄式深松铲,其铲尖和铲柄共同对土壤产生作用力,增大土壤破碎范围,提高了松土系数,进一步增强松土效果。
2.2 深松铲设计
2.2.1 深松铲结构
基于海南农业区香蕉地工作环境,选定间隔深松工作方式,选用斜柄式深松铲,最终设计深松铲如图2所示。整铲采用65Mn钢材料,具有良好的耐磨性,结构简单、使用方便、部件质量小。
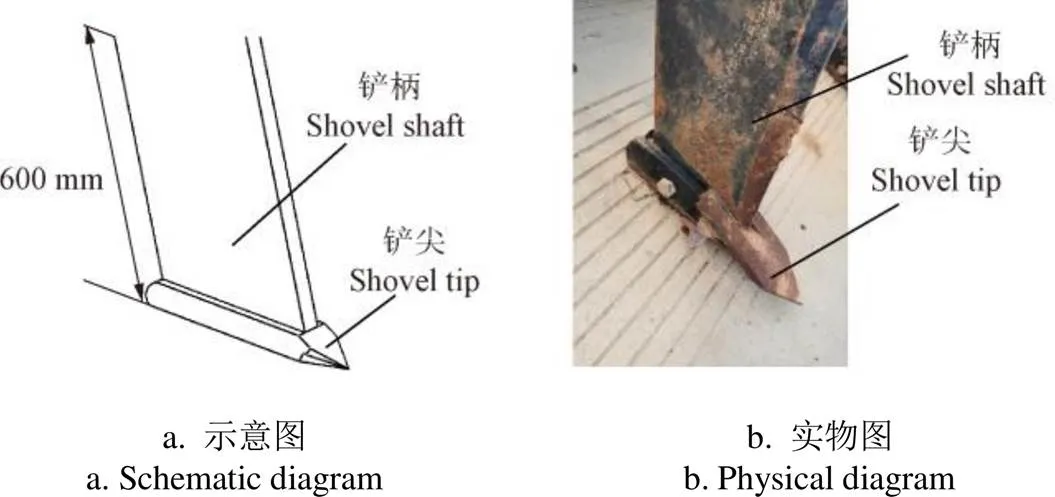
图2 深松铲结构
2.2.2 深松铲受力分析
海南农业区香蕉地多为砖红壤,由于年降水量大,土层黏重,机具工作时土壤易附着在耕作部件上,导致出现强附着阻力。与一般沙土或壤土相比,由于砖红壤土黏附于深松铲上,前进过程中会受切向黏附阻力作用,导致整铲牵引阻力增大,同时铲柄前方土壤容易出现黏附包现象[28],进而影响松土质量。因此,需分析在砖红壤土工作条件下深松铲的受力情况,合理设计相应参数。深松机在香蕉地工作时,深松铲柄受对砖红壤产生剪切作用的反向作用力、深松铲尖受对砖红壤产生切削作用的反向作用力[29-30],同时深松铲面因被砖红壤粘附,机具前进过程受切向黏附阻力,铲尖和铲柄整体受力如图 3所示。
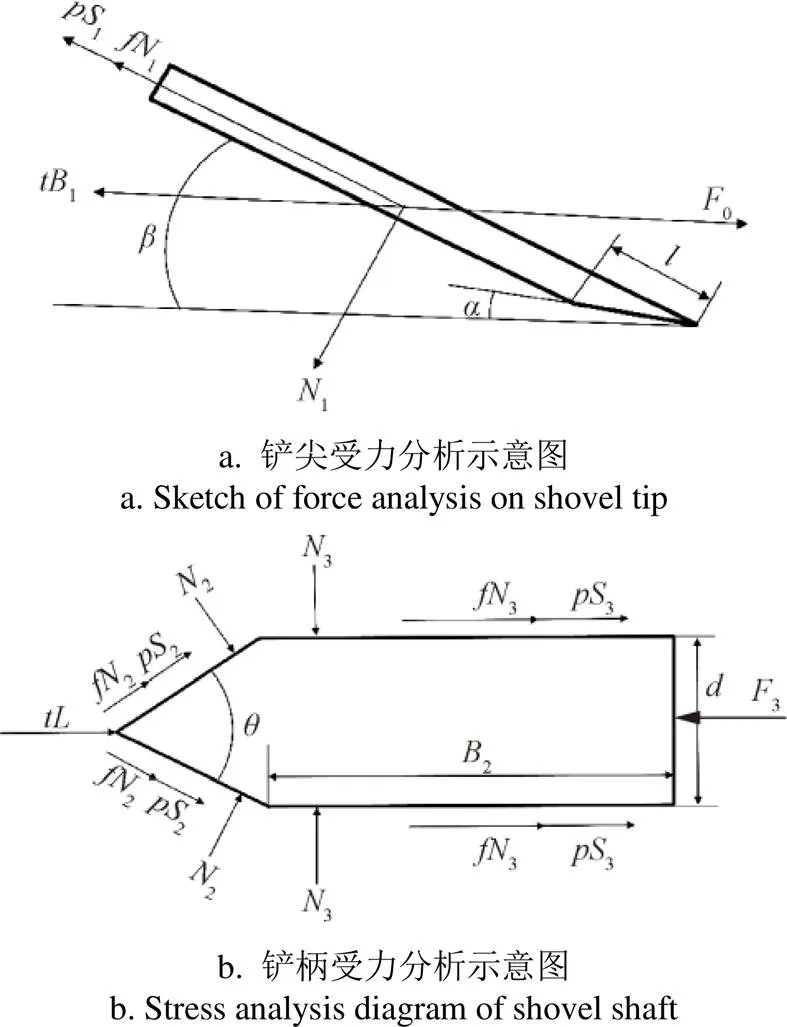
注:F0为铲尖所受的水平牵引力,N;p为砖红壤对铲尖单位面积黏附力,N·mm-2;S1为铲尖上端面的面积,mm2;β为深松铲入土角,(°);f为摩擦系数;N1为铲尖受到砖红壤的垂直作用压力,N;N2为铲柄刃口受到砖红壤的垂直作用压力,N;B1为铲尖宽度,mm;α为入土隙角,(°);l为深松铲尖长度,mm。其中S1=lB1。t为单位宽度土壤的切削阻力,N·mm-1;L为深松铲柄刃口长度,mm;d为铲柄厚度,mm;B2为铲柄侧面宽度,mm;θ为铲柄刃口夹角,(°);S2为铲柄刃口面积,mm2;N3为铲柄侧面受到砖红壤的垂直作用压力,N;S3为铲柄侧面面积,mm2,F3为铲柄所受的水平牵引力,N。
深松铲尖、铲柄主要受黏附阻力、剪切力、切削力、摩擦阻力作用,如图3所示,其中铲尖、铲柄所受阻力的水平方向的合力分别与0、3大小相等,方向相反,因此可得


根据几何关系,得
式中为深松深度,mm。
一般情况下,土壤的纯切削很小,所以入土隙角、铲尖宽度1和铲柄刃口长度对深松铲牵引阻力的影响可忽略不计[31],故深松铲工作时所受阻力=1+2。同时当深松深度超出临界范围时,疏松范围会逐渐减少,反而影响深松效果。香蕉根系主要分布范围为25~35 cm,故本次设计深松铲深松深度为250~350 mm。砖红壤土的最小入土角为40°[31],同时有研究表明,入土角在20°~45°范围内时耕作阻力最小[32],故选定深松铲入土角为45°,铲柄刃口夹角选定为45°,铲柄厚度选定为30 mm,铲柄侧面宽度2选定为100 mm[33-34]。
2.3 破土刃设计
选取破土刃工作临界状态下的土壤颗粒进行受力分析,如图4所示。

注:FN1为地面对土壤颗粒的支撑力,N;FN2为破土刃作用于土壤颗粒的正压力,N;Ff1为土壤颗粒与地面摩擦力,N;Ff2为破土刃与土壤颗粒间摩擦力,N;γ为破土刃与土壤颗粒的夹角,(°);R为破土刃半径,mm;m为破土刃入土深度,mm;r为土壤颗粒半径,mm;x、y为坐标轴。
深松机工作时,破土刃沿着轴向前运动,为保证土壤被破碎且不被破土刃沿着轴拖走,由土壤颗粒受力条件可得
当土壤颗粒处于将要运动的临界状态时,此时静摩擦力达到最大值,则

式中1为土壤颗粒与地面间摩擦角,(°);2为土壤颗粒与破土刃间摩擦角,(°)。
将式(6)代入式(5)中,得
由图4几何关系,可得

将式(8)代入式(7)中,得
当不变时,为满足式(9),应尽可能小,同时为保证能提前完成破土过程,以便后续深松铲工作降低工作阻力,考虑香蕉根系分布范围,本次设计选取破土刃入土深度为150~250 mm,此时破土刃半径越大则越小,考虑到深松机结构紧凑性和深松铲总长度限制,本次设计选取破土刃半径=450 mm。
3 试验与结果分析
3.1 试验条件
试验在海南大学儋州香蕉试验田进行,试验选用的香蕉树品种为香蕉1号,其他试验设备有雷沃欧豹M804拖拉机(田间实际作业速度范围为1.15~1.69 m/s)、SC900型土壤坚实度测定仪、JC-ST-3型土壤水分测定仪、NP-501型电子天平秤、8210型钢卷尺、米尺、TA-396型秒表、环刀。
3.2 试验方法
土壤坚实度指土壤抵抗外力压实和破碎的能力,土壤坚实度过大影响土壤的蓄水保墒能力[35];土壤容重指一定容积的土壤烘干后质量与烘干前体积的比值,又称土壤密度,是土壤理化特性最重要的一项指标,与作物产量有负相关关系[36],土壤容重小,表明土壤结构性好,土层疏松,肥力较高;反之,土壤容重大,表明土体紧实,结构性和通透性较差。因此,本试验选取土壤坚实度和土壤容重为试验指标。由对深松铲尖、铲柄的受力分析可知深松深度、入土角、铲柄厚度等参数为影响深松铲松土效果的因素,结合整机工作环境,选定机器前进速度、深松深度与破土刃入土深度为试验因素,根据参数范围分别选定各因素水平,如表2所示,共进行13次试验。
3.3 试验指标的测试方法
3.3.1 土壤坚实度
借助土壤坚实度测定仪,将试验地点的土壤表面整平,按照内对角线规则在检测区域内随机选取5个采样点,测量时将土壤紧实度测定仪的锥形刺头缓慢的垂直插入土壤中,并从表上读取硬度指示值。一次测定完毕后,将指示表归零,反复测量5次,计算平均值。
3.3.2 土壤容重
采用环刀法测定土壤容重,将试验地点的土壤表面整平,取土前对环刀质量进行称量,记为1,在检测区域内随机选取5个采样点,将环刀边缘垂直刺入待测土壤;将待测土壤样品从环刀圆筒中取出,将环刀两端的多余土壤切至平齐,将环刀外覆盖的土壤擦拭干净,同时盖上盖子避免水分蒸发;将盛满土样的环刀放入烤箱,加热烘干4 h,待完全冷却后称质量,记为2(精确至0.01 g)。则土壤容重为
式中为土壤容重,g/cm3;1为环刀质量,g;2为环刀和烘干土质量,g;为环刀容积,cm3。
3.4 结果与分析
试验结果如表3所示。

表3 试验结果
3.4.1 回归模型分析
应用Design-expert软件对试验结果进行多元回归拟合分析,可分别得到土壤坚实度、土壤容重回归模型


回归方程(11)、(12)的决定系数分别为12=0.977、22=0.975,表明两模型可分别用来解释97.66%、97.45%的试验差异,与实际数据的拟合程度高;校正决定系数分别为0.969、0.966,表明相关性较好;变异系数分别为0.48%、0.85%,表明数据离散程度低;综上表明该模型具有较好的可靠性,可以用于进一步分析。经Design-Expert软件处理后,分别得出土壤坚实度和土壤容重方差分析结果如表4所示。
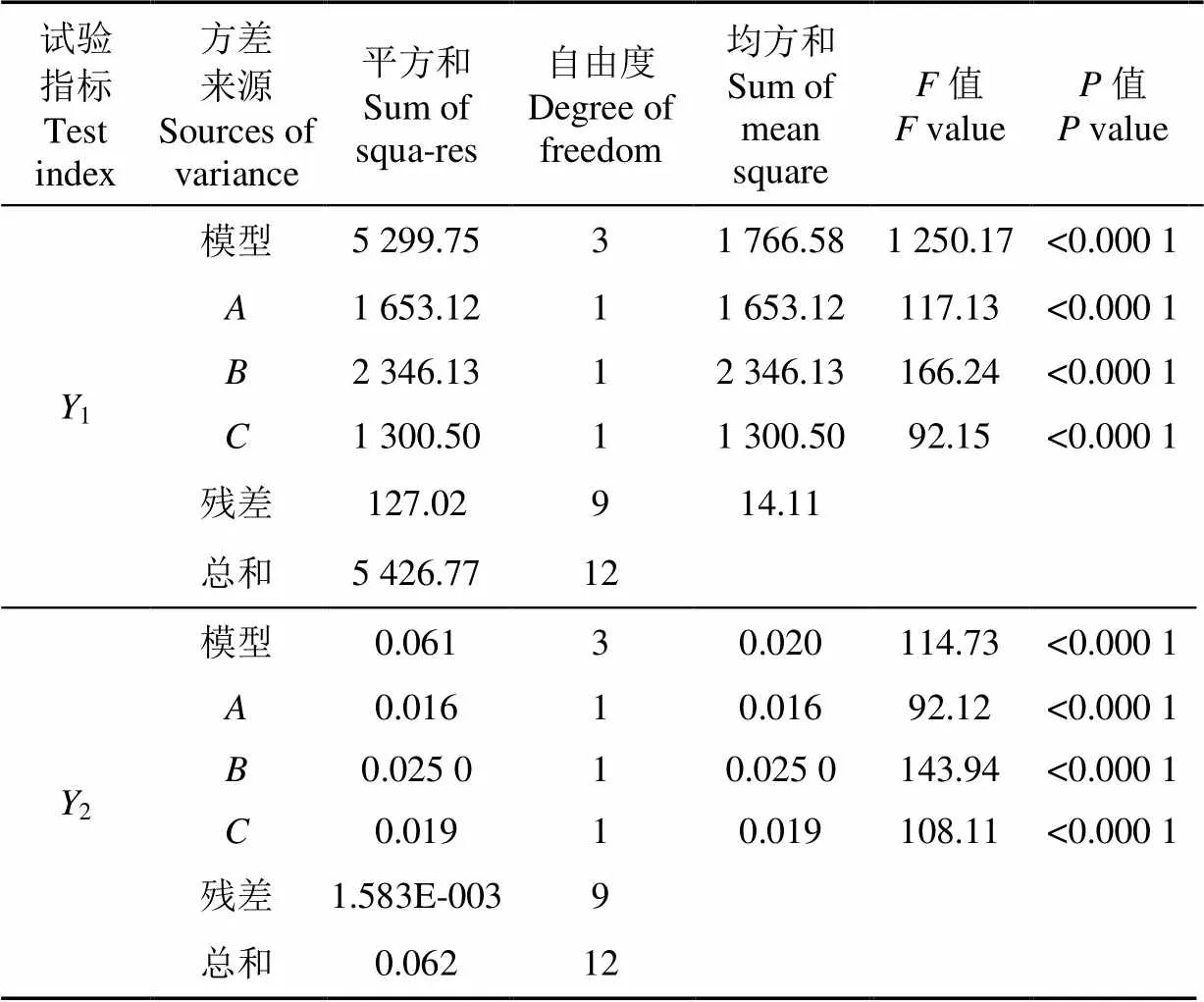
表4 回归模型方差分析
注:<0.01 表示该项显著,<0.001表示该项极显著。
Note:<0.01 represents significant,<0.001 represents extremely significant.
由表 4可知土壤坚实度和土壤容重的模型显著性值均小于0.000 1,说明2个回归模型都极显著;在给定的试验因素水平范围内,前进速度、深松深度、破土刃入土深度对土壤坚实度和土壤容重影响都极显著。
3.4.2 参数优化与试验验证
利用Design-Expert软件的Optimization功能,进行优化分析,得到香蕉地预破土凿式深松机的最优参数组合为机器前进速度1.15 m/s、深松深度350 mm、破土刃入土深度250 mm,在该最优参数组合下,土壤坚实度为734 Pa,土壤容重为1.42 g/cm3。根据优化分析得到的最优参数组合,进行田间验证试验,如图5所示。
开展验证试验,为消除随机误差,重复试验5次,取5次试验结果的平均值。根据田间试验验证得出,在给定的优化参数下,土壤坚实度为752 Pa,土壤容重为1.48 g/cm3,与最优结果(734 Pa、1.42 g/cm3)之间的误差为2.4%、4.2%,表明设计合理。
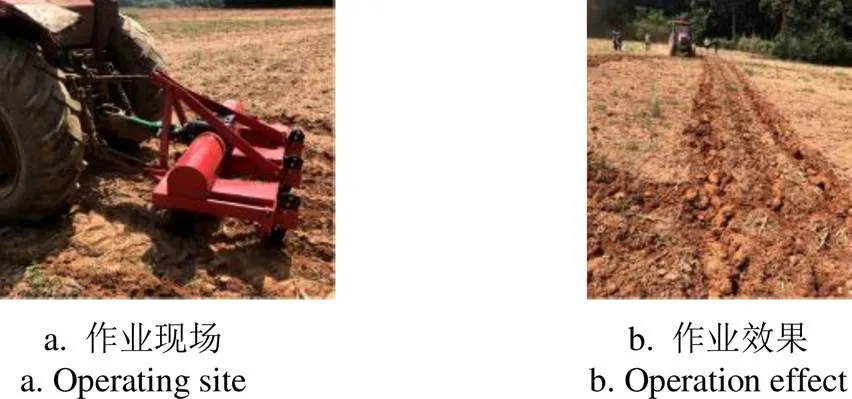
图5 作业现场及效果
3.5 对比试验
为验证预破土凿式深松机相较于传统深松机具在松土质量上的提高程度,将本次试验设计样机与原有深松机具开展对比试验,如图6所示。两台深松机的前进速度为1.15 m/s,深松深度、破土刃入土深度分别设置为350、250 mm。取5次试验的平均值,测得预破土凿式深松机与传统深松机工作后,土壤坚实度分别为761、813 Pa;土壤容重分别为1.48、1.64 g/cm3。
综合所测量数据可得,相较于传统香蕉地深松机,预破土凿式深松机工作后,土壤坚实度下降6.39%,土壤容重下降9.76%,进一步证明本次试验研制样机更加适用于海南热区香蕉地深松作业。
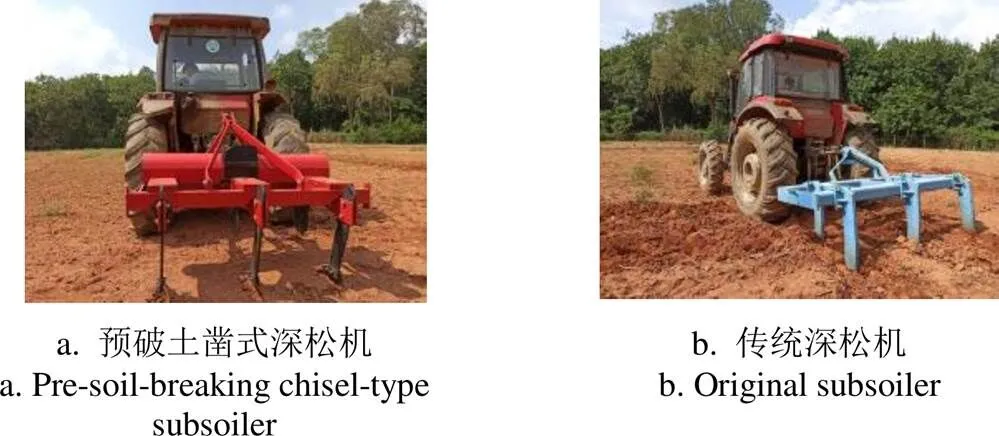
图6 深松试验对比
4 结 论
基于间隔深松方式及斜柄式深松机理研究,对深松铲总成、破土刃等关键部件结构进行了设计,对深松铲尖及铲柄受力进行了分析。
1)应用Box-Behnken试验设计确定3个显著影响因素最优值为机器前进速度1.15 m/s、深松深度350 mm、破土刃入土深度250 mm。最优参数组合下的土壤坚实度为734 Pa,土壤容重为1.42 g/cm3。对比验证试验结果表明:在给定的优化参数下,土壤坚实度为752 Pa,土壤容重为1.48 g/cm3,与理论优化值之间的误差为2.4%、4.2%,表明设计合理。
2)与传统深松机具开展对比试验,结果表明:相较于传统深松机具,预破土凿式深松机作业后,土壤坚实度下降6.39%,土壤容重下降9.76%,进一步证明本次试验研制样机适用于海南热区香蕉地深松作业。
[1]朱瑞祥,张军昌,薛少平,等. 保护性耕作条件下的深松技术试验[J]. 农业工程学报,2009,25(6):145-147. Zhu Ruixiang, Zhang Junchang, Xue Shaoping, et al. Experimentation about subsoiling technique for conservation tillage[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(6): 145-147. (in Chinese with English abstract)
[2]何进,李洪文,高焕文. 中国北方保护性耕作条件下深松效应与经济效益研究[J]. 农业工程学报,2006,22(10):62-67. He Jin, Li Hongwen, Gao Huanwen, et al. Subsoiling effect and economic benefit under conservation tillage mode in Northern China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(10): 62-67. (in Chinese with English abstract)
[3]Zeng Zhiwei, Chen Ying, Zhang Xirui. Modelling the interaction of a deep tillage tool with heterogeneous soil[J]. Computers and Electronics in Agriculture, 2017, 143: 130-138.
[4]孙亚朋,董向前,宋建农,等. 振动深松机多组振动深松铲自平衡性能及仿真分析[J]. 农业工程学报,2018,34(4):92-99. Sun Yapeng, Dong Qianqian, Song Jiannong, et al. Self-balancing performance and simulation analysis of multi-group vibrating sholvels of oscillatory subsoiler[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 92-99. (in Chinese with English abstract)
[5]中国农业机械化信息网. 农业部发布《全国农机深松整地作业实施规划(2016-2020年)》[N]. (2017-11-27) [2020-06-08]. http: //www. moa. gov. cn/nybgb/2016/disanqi/ 201711/t20171127_5920218. htm.
[6]Lava K P, Hanna R, Alabi O J, et al. Bananabunchy top virusin sub-Saharan Africa: Investigations on virus distribution and diversity[J]. Virus Research, 2011, 38(4): 171-182.
[7]Reddy N, Yang Y. Biofibers from agricultural byproducts for industrial applications[J]. Trends Biotechnol, 2005, 23(1): 22-27.
[8]中国科学报. 香蕉产业:小概念欲创大格局[R]. (2015-06-24) [2020-09-08]. http: //tech. hexun. com/2015-06-24/ 176969253. html.
[9]陈小敏,陈珍莉,陈汇林. 海南岛香蕉种植农业气候区划初探[J]. 气象研究与应用,2013,34(2):51-54. Chen Xiaomin, Chen Zhenli, Chen Huilin. Agricultural climate zoning for banana planting in Hainan[J]. Journal of Meteorological Research and Application, 2013, 34(2): 51-54. (in Chinese with English abstract)
[10]高茂盛,薛少平,廖允成,等. 手扶拖拉机专用深松机果园试验[J]. 农业机械学报,2010,41(10):35-39. Gao Maosheng, Xue Shaoping, Liao Yuncheng, et al. Experiment of Subsoiling Technique in Apple Orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 35-39. (in Chinese with English abstract)
[11]张喜瑞,王自强,李粤,等. 滑切防缠式香蕉秸秆还田机设计与试验[J]. 农业工程学报,2018,34(3):26-34. Zhang Xirui, Wang Ziqiang, Li Yue, et al. Design and experiment of sliding-cutting and anti-twining returning device for banana straw[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(3): 26-34. (in Chinese with English abstract)
[12]邓衍夫,邓传虎,邓传林. 振动式旋耕、深松一体机[P]. 201210286100. 6,2012-11-07.
[13]凯斯纽荷兰公司. 耕整地机械[R]. (2019-06-24) [2020-09-08]. http://www.nongjitong. com/product/4929.htm.
[14]李成鑫. 深松整地联合作业机的优化设计[D]. 杨凌:西北农林科技大学,2015. Li Chengxin. Optimization of Combined Machine for Subsoiling and Land Preparation[D]. Yangling: Northwest A&F University, 2015. (in Chinese with English abstract)
[15]张强,张璐,刘宪军,等. 基于有限元法的仿生钩形深松铲耕作阻力[J]. 吉林大学学报:工学版,2012,42(增刊1):117-121. Zhang Qiang, Zhang Lu, Liu Xianjun, et al. Soil resistance of the bionic hook-shape subsoiler based on the finite element method[J]. Journal of Jilin University: Engineering and Technology Edition, 2012, 42(Supp.1): 117-121. (in Chinese with English abstract)
[16]郑侃,何进,李洪文,等. 反旋深松联合作业耕整机设计与试验[J]. 农业机械学报,2017,48(8):61-71. Zheng Kan, He Jin, Li Hongwen, et al. Design and experiment of combined tillage implement of reverse-rotary and subsoiling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 61-71. (in Chinese with English abstract)
[17]郑侃,陈婉芝. 深松机具研究现状与展望[J]. 江苏农业科学,2016,44(8):16-20.
[18]Jankauskas V, Katinasa E, Varnauskas V, et al. Assessment of the reliability of hardfacings for soil rippers[J]. Journal of Friction and Wear, 2015, 36(1): 89-95.
[19]Jankauskas V, Katinas E, Skirkus R, et al. The method of hardening soil rippers by surfacing and technical-economic assessment[J]. Journal of Friction and Wear, 2014, 35(4): 270-277.
[20]Askari M, Shahgholi G, Abbaspour-Gilandeh Y, et al. The effect of new wings on subsoiler performance[J]. American Society of Agricultural and Biological Engineers, 2016, 32(3): 353-362.
[21]李柏林,李明,廖宇兰,等. 甘蔗地凿式深松犁角度参数的优化研究[J]. 农机化研究,2017,39(6):170-176. Li Bolin, Li Ming, Liao Yulan, et al. Optimization study on the angle parameter of chisel shaped sub-soiling plough used in sugarcane land[J]. Journal of Agricultural Mechanization Research, 2017,39(6): 170-176. (in Chinese with English abstract)
[22]韦丽娇,董学虎,李明,等. 1SG- 230 型甘蔗地深松旋耕联合作业机的设计[J]. 广东农业科学,2013(13):177-179. Wei Lijiao, Dong Xuehu, Li Ming, et al. Design of 1SG-230 typed sugarcane ripper cum rotary tiller[J]. Guangdong Agricultural Sciences, 2013(13): 177-179. (in Chinese with English abstract)
[23]甘声豹,张喜瑞,李粤,等. 热带香蕉地振动深松机的设计与研究[J]. 农机化研究,2015,37(4):83-86. Gan Shengbao, Zhang Xirui, Li Yue, et al. The design and research of deep loosening vibration machine for the tropical banana field[J]. Journal of Agricultural Mechanization Research, 2015, 37(4): 83-86. (in Chinese with English abstract)
[24]李伟. 分层深松对土壤扰动的影响研究[D]. 杨凌:西北农林科技大学,2017. Li Wei. Influence Research of Subsoiling in Tandem on Soil Disturbance[D]. Yangling: Northwest A&F University, 2017. (in Chinese with English abstract)
[25]高喜杰. 行间深松土壤虚实结构影响因素及其耕种效果研究[D]. 杨凌:西北农林科技大学,2018. Gao Xijie. Influence Factor of Soil Furrow Loose and Ridge Compations Structure and Tliiage Effect of In-line Subsoiler[D]. Yang ling: Northwest A&F University, 2018. (in Chinese with English abstract)
[26]王亚东. 虚实并存(间隔)耕作产生发展及其启示[D]. 北京:中国农业大学,2005. Wang Yadong. Origin, Development of Zone Tillage and Its Enlightenment[D]. Beijing: China Agricultural University, 2005. (in Chinese with English abstract)
[27]中国农业机械化科学研究所. 农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007.
[28]任泉露. 土壤粘附力学[M]. 北京:机械工业出版社,2011.
[29]蒋建东,高洁,赵颖娣,等. 基于ALE有限元仿真的土壤切削振动减阻[J]. 农业工程学报,2012,28(增刊1):33-38. Jiang Jiandong, Gao Jie, Zhao Yingdi, et al. Numerical simulation on resistance reduction of soil vibratory tillage using ALE equation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 33-38. (in Chinese with English abstract)
[30]余泳昌,刘文艺,赵迎芳,等. 立柱式深松铲受力数学模型及试验分析[J]. 农业工程学报,2007,23(6):109-113. Yu Yongchang, Liu Wenyi, Zhao Yingfang, et al. Force mathematical model and examination analysis of the column subsoiler[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(6): 109-113. (in Chinese with English abstract)
[31]曾德超. 机械土壤动力学[M]. 北京:北京科学技术出版社,1995.
[32]许春林,李连豪,赵大勇. 北方大型联合整地机设计与试验[M]. 北京:中国农业大学出版社,2014.
[33]仇倩倩,张喜瑞,梁栋,等. 香蕉免耕地深松铲的设计与有限元分析[J]. 农机化研究,2013,35(5):64-67. Qiu Qianqian, Zhang Xirui, Liang Dong, et al. Loosening shovel's design and finite element analysis used in banana no-till land[J]. Journal of Agricultural Mechanization Research, 2013, 35(5): 64-67. (in Chinese with English abstract)
[34]陈坤. 后掠式弧形深松铲柄的结构优化研究[D]. 长春:吉林农业大学,2012. Chen Kun. Study on Structural Optimization of Extroverted Arc Subsoiler[D]. Changchun: Jilin Agricultural University, 2012. (in Chinese with English abstract)
[35]周华,张文良,杨全军,等. 滑切型自激振动减阻深松装置设计与试验[J]. 农业机械学报,2019,50(5):71-78. Zhou Hua, Zhang Wenliang, Yang Quanjun, et al. Design and experiment of sliding cutting self-excited vibration drag reduction subsoiling device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 71-78. (in Chinese with English abstract)
[36]胡立峰. 中国土壤类型下免耕对土壤容重的影响[J]. 中国农学通报,2020,36(12):73-78. Hu Lifeng. No-tillage affects soil bulk density under major soil types in China[J]. Chinese Agricultural Science Bulletin, 2020, 36(12): 73-78. (in Chinese with English abstract)
Design and experiment of pre-soil-breaking chisel-type subsoilers for banana field in hot areas of Hainan Province, China
Zhang Xirui, Zhang Rui, Ru Shaofeng※, Zhang Xiumei, Li Yue, Liang Dong
(,,570228,)
As one of the fruits widely planted in tropical areas, banana occupies an important position in the world fruit trade market. At present, in order to increase banana yield and improve banana quality, banana planting mostly adopts the “one in two years” mode. The operation times of agricultural machinery greatly increased because the short cycle banana planting mode combined with the traditional banana field tillage and rotary tillage mode, which results in the continuous compaction and formation of plough bottom under the soil tillage layer of banana field, then the soil surface roughness reduce. Rainwater is difficult to penetrate into the soil to form surface runoff and take away a large amount of surface soil and organic matter, affecting the growth of banana trees and banana production. Traditional subsoiling machines and tools generally have problems such as high work resistance, high energy consumption and low efficiency. At present, due to the regional characteristics of banana planting, the development and research of special subsoiler for banana field is still relatively weak, which seriously restricts the popularization and application of subsoiling technology in tropical agricultural areas. Firstly, the subsoiling method of the whole machine was determined in this study, and the three-dimensional model of the pre-soil-breaking chisel-type subsoiler was established. Based on the research of interval subsoiling method and inclined handle subsoiling mechanism, the structure of subsoiling shovel assembly, soil breaking disc and other key components were designed, and the force of subsoiling shovel tip and shaft was analyzed to ensure the working stability. At the same time, field experiments were carried out to determine the soil firmness and soil bulk density after subsoiling, and the factors that had significant effect on soil firmness and soil bulk density were determined, that was, working speed, subsoiling depth and penetration depth of soil breaking disc. Moreover, the second-order regression model of response value and significant parameters were obtained by taking soil firmness and soil bulk density as response values, and the optimal parameter combination was obtained by optimizing the significant parameters. The Box-Behnken test design was used to determine the optimal values of three significant factors: the working speed of the machine was 1.15 m/s, the subsoiling depth was 350 mm, and the penetration depth of the disc was 250 mm. The soil firmness was 734 Pa, the soil bulk density was 1.42 g/cm3under the given optimized parameters. Furthermore, the verified test was carried out and the results showed that the error of soil firmness and the soil bulk density between the test value and the theoretical value were 2.4% and 4.2% respectively. Finally, the comparative results between the existing traditional subsoiling machines and pre-soil-breaking chisel-type subsoiler showed that the soil firmness of the developed pre breaking chisel subsoiler reduced by 6.39% and the soil bulk density decreased by 9.76%. which indicated that the pre-soil-breaking chisel-type subsoiler was more suitable for the subsoiling operation of banana field in Hainan hot area. The design of the machine can promote of subsoiling technology in tropical area of Hainan and supply references for application.
agricultural machinery; design; experiment; subsoiler; banana field; chisel-type
张喜瑞,张锐,汝绍锋,等. 海南热区香蕉地预破土凿式深松机设计与试验[J]. 农业工程学报,2020,36(18):49-55.doi:10.11975/j.issn.1002-6819.2020.18.007 http://www.tcsae.org
Zhang Xirui, Zhang Rui, Ru Shaofeng, et al. Design and experiment of pre-soil-breaking chisel-type subsoilers for banana field in hot areas of Hainan Province, China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(18): 49-55. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.18.007 http://www.tcsae.org
2020-07-01
2020-09-08
国家自然科学基金(51865007)、海南省自然科学基金高层次人才项目(2019RC014)
张喜瑞,教授,博士生导师,主要从事热带智能农业机械研究。Email:zhangxirui_999@sina.com
汝绍锋,副教授,主要从事热带智能农业机械研究。Email:ru.shaofeng@163.com
10.11975/j.issn.1002-6819.2020.18.007
S220.1
A
1002-6819(2020)-18-0049-07
猜你喜欢
蜜蜂杂志(2021年10期)2021-12-06
红领巾·探索(2021年2期)2021-08-26
蜜蜂杂志(2021年11期)2021-02-18
今日农业(2020年19期)2020-11-06
学生天地(2020年34期)2020-06-09
军事文摘·科学少年(2020年2期)2020-03-19
商品与质量(2019年37期)2019-11-28
当代陕西(2019年11期)2019-06-24
家教世界·V家长(2019年3期)2019-06-11
小天使·三年级语数英综合(2017年11期)2017-12-05
