
柑橘育苗钵装填转运机设计与试验
2020-12-02 16:05徐勤超李善军张衍林卢红安
农业工程学报 2020年18期
徐勤超,李善军,张衍林,孟 亮,卢红安,谢 林
柑橘育苗钵装填转运机设计与试验
徐勤超,李善军※,张衍林,孟 亮,卢红安,谢 林
(华中农业大学工学院,农业农村部长江中下游农业装备重点实验室,武汉 430070)
目前国内柑橘育苗钵装填转运基本靠人工作业,生产效率低下。为了解决这一问题,该研究提出了一种可一次装填105钵的间歇式柑橘育苗钵机械装填转运机,采用EDEM对装填转运机基质分流过程进行分析,确定了基质分流部件分流板偏移量及高度的参数组合,设计了卸料机构的连杆传动方案,计算了各杆长度,分析了车架结构的强度,确定了车架结构的尺寸参数,并设计了整机的控制电路。加工试验样机,在搅拌机设定转速下,重复装填转运试验10次。试验结果表明,样机运行稳定,单次基质装填平均量330.5 kg,单次装填钵数105钵,平均装填时间约60 s,转运装置行走速度可达1.2 m/s,苗钵卸载下落可靠,排列整齐;单个育苗钵的平均最大装填量3.23 kg,最小装填量3.03 kg,平均装填量3.15 kg。样机结构设计合理,装填效率高,能够实现均匀装填、稳定转运的作业要求。研究结果可为后续柑橘苗钵装填转运设备的研制和优化提供参考。
农业机械;设计;试验;柑橘;育苗钵;装填;转运;EDEM
0 引 言
柑橘容器育苗具有缓苗快、成活率高等优点,正逐步成为一种主要的育苗栽培方式[1-3]。目前,中国的柑橘容器育苗机械化作业程度很低,主要依靠人工作业,特别是苗钵装填环节,劳动强度大,生产效率低,已成为产业发展的主要障碍。为了解决这一问题,亟需研制柑橘育苗钵机械化装填转运设备,以提高容器育苗的整体效率。
目前,荷兰、比利时、德国、美国等国家已有成熟的基质装填装备,工作效率高、适用范围较广,部分机型已完成了与定植移栽装备的无缝对接[4-10]。而国内基质装填装备的研发还处于起步阶段,相关设备缺乏[11-17]。荷兰JAVO公司生产的Standard型花盆基质装填机采用拨叉式机构来实现自动落盆,装填效率高且能适应质量较大、质地粗糙的砂以及含水率高的黏湿基质。比利时Demtec公司开发的SMART花盆基质装填机,结构紧凑,动力需求小,但是装填过程中需要人工协助落盆,适用于小规模的生产需求[11]。德国Mayer公司的TM2600花盆基质装填机工作效率最高,最大工作效率高达每小时8 000盆。台湾亦祥公司开发的花盆基质装盆机将花盆放入落料盘上的定位孔里进行装填,可以同时适用于软质和硬质的容器,但该设备需人工来辅助完成落盆,且设备体积较大,结构冗杂。总体而言,因已有机器体积庞大、价格昂贵、动力要求大、维修困难。柑橘育苗钵分软质和硬质2种,不论是软质育苗袋还是硬质育苗钵都不能稳定地竖直装填,需要辅助的定位和撑开装置,目前还没有与柑橘苗钵装填工艺匹配的装填转运机械[18-24]。
基于此,本文提出了一种一次装填105钵的间歇式育苗钵机械装填转运机,确定了关键部件的结构参数,设计了整机的控制电路,并加工了试验样机进行作业性能试验,以验证装填转运结构设计的合理性及装填效率,为后续柑橘苗钵装填转运设备的研制和优化提供参考。
1 装填转运机结构与工作原理
1.1 整机结构
柑橘育苗钵装填转运机由装填装置和转运装置2个独立的部分组成。装填装置包括机架、刮板机构、驱动机构;转运装置包括车架、动力系统、行走机构和转向机构,具体结构如图1。
装填装置和转运装置配合使用,整机参数如表1。
1.2 工作原理
装料前,操作解锁转动装置至解锁状态,将连杆机构的操作杆运动到解锁装置并锁紧。此时,连杆机构的翻板运动到水平装填状态。将育苗钵撑开并放入隔间内,盖上盖板。启动转运装置,控制转运装置行驶到装填装置下方,通过转运装置的导向轮与装填装置的导轨配合,引导转运装置运动到装料位置。装料时,打开控制开关,装填转运机启动,搅拌罐输送基质到装填装置,经基质分流装置分流后,刮土机构将基质均匀装满育苗钵,装料完成,关闭开关。装料后,启动转运装置,控制其运动到卸料位置后停止,打开解锁装置,操作连杆机构的操作杆运动至卸料状态,翻板在连杆机构的作用下运动到竖直位置,隔间内的育苗钵在重力作用下下落。

图1 装填转运机结构示意图

表1 柑橘育苗钵装填转运机主要参数
2 装填转运机关键部件设计
2.1 装填装置基质分流部件设计
基质分流部件对搅拌口的出料进行分流,确保基质被刮板刮入育苗钵前是均匀分布的,具体结构如图2。基质沿着搅拌罐内部的导流板流出,具有一定的切向速度,并不会落在基质导流板的中线位置,而是有一定的偏移。由于分流板的存在,适量的基质越过分流板,保证分流板正后方区域的基质流量。因此,在其他结构参数确定的情况下,适当的分流板中间位置距基质导流板中线的偏移量及分流板高度可以保证基质被刮入育苗钵前是均匀分布的。本文采用EDEM建立装填转运机出料分流模型进行仿真分析,以获得分流板偏移量及高度的最佳参数组合。

注:oo’为基质导流板中线;f为分流板中间位置距离基质导流板中线的偏移量,mm;h为分流板高度,mm。
2.1.1 EDEM仿真参数设置
基质从搅拌罐中流出及分流的过程实质是搅拌罐及基质分流部件与颗粒以及颗粒与颗粒之间的接触碰撞过程。为描述碰撞过程,采用Hert-Mindlin无滑移模型。搅拌机及装填转运机材料为钢,基质参考华南地区沙质土壤,各材料的力学特性参数[25]见表2、表3。

表2 材料参数

表3 材料接触系数
基质颗粒为添加了一定量有机质的土壤,其粒径主要分布在0.5~3.5 mm。通过统计分析,粒径在2.5~3.5、1.5~2.5、0.5~1.5 mm三个区间的比例为1∶5∶10。因此,不同粒径的基质颗粒按照1∶5∶10比例建立球形颗粒模型。根据配套使用的JZC-300搅拌机参数(外形尺寸:2 260 mm×1 900 mm×2 750 mm;出料容量:300 L),建立简化搅拌机模型。根据基质导流板尺寸,取分流板2条边长为200 mm,夹角为90°,基质分流机构离散元模型如图3。

图3 基质分流机构的离散元模型
2.1.2 EDEM仿真结果分析
为了分析基质颗粒在经过分流板分流后横向分布的均匀性,将分流板后的导流区域划分为8个均匀的计算域,从左到右依次编号为1~8,对每个计算域中包含的颗粒数量进行统计,如图4所示。

注:1~8表示计算区域编号。
JZC-300搅拌机实际额定转速为14.57 r/min,出料量300 L/min。因此,仿真时设置搅拌机转动角速度1.5 rad/s (14.57 r/min),根据出料量大小,初步设定分流板高度为210 mm,分析不同分流板偏移量时基质颗粒的流动情况,仿真结果如图5a。
由图5a可知,1号和8号计算域内颗粒数量基本为0,这是由于1号和8号计算域为两侧挡板区域,理论上基质颗粒数应为0;处于中间位置的4号和5号计算域的颗粒数量始终低于其他区域,说明分流板的高度过高,阻挡了基质颗粒越过分流板,基质颗粒大多流向左右两侧;当分流板的偏移量为75 mm时,2、3、6、7号计算域内颗粒数量基本一致,因此初步确定分流板的偏移量为75 mm。
取分流板偏移量为75 mm,对不同的分流板高度进行计算,仿真结果如图5b。
由图5b可知,随着分流板高度逐渐降低,左右两侧的2、3、6、7号计算域内的颗粒数量逐渐减少,而中间4、5号计算域内的颗粒数量逐渐增多;当分流板的偏移量为75 mm,高度195 mm时,各计算域内颗粒数量基本一致。因此,确定分流板相对基质导流板中线的偏移量为75 mm、高度为195 mm。

图5 EDEM仿真结果
2.2 转运装置卸料机构设计
转运装置卸料机构主要实现育苗钵的放置和卸载。该机构的运动由连杆机构实现(图6)。装填状态下,连杆机构的操作杆由解锁装置锁定在机架上,翻板旋转到水平位置;卸料状态下,解锁装置打开,操作杆运动到初始操作位置,翻板旋转到竖直状态。

图6 卸料机构示意图
为确定卸料机构参数,对连杆机构的运动进行分析,连杆机构的运动简图如图7a。原动件1在初始位置时,连架杆4、5处于竖直的卸料状态;原动件1运动到水平锁定位置时,连架杆4、5运动到水平的装填状态,连杆3保持平动。图7b为连杆机构在装填和卸载状态的位置示意图,为原动件,为连杆,为翻板,实线表示装填状态位置,虚线表示各杆件卸载状态位置。

图7 连杆机构图
考虑连杆机构连架杆的初始位置要求及空间布置要求,初步确定长度=17 mm、长度=30 mm、长度=183 mm、长度=15 mm、=90 mm、=350 mm。由图7b的几何关系确定各杆杆长:

连杆机构要运动到卸载状态,杆长必须满足条件:
+>(2)
其中

且=+,=。
经过计算,250.1 mm,'=286 mm>,各杆件尺寸满足图7b所示的几何关系。
2.3 转运装置车架结构设计
在柑橘育苗大棚内,一垄一般按每排7个放置育苗钵,而转运装置由于运动的要求不能设计过长,因此设计一次转运15排,每排7个育苗钵。在内框中设计15×7个育苗钵隔间,为方便卸料,隔间长宽略大于装填完基质的育苗钵的尺寸,因此内框尺寸为1 599 mm×824 mm× 220 mm(长×宽×深),内框置于支撑架上,具体结构如图8。

图8 车架结构图
Fig. 8 Diagram of frame structure
转运装置的支撑架是设备承重部分,上支撑柱主要承受育苗钵隔间的质量,下支撑柱承受整机和基质的质量,因此支撑架上下框架采用不同强度的Q235方钢,以减轻总体质量。
支撑柱承受的压强为

式中0为接触位置所受的压力,N;为接触面积,m2;0为方钢的外边长,m;为方钢的内边长,m。
根据理论计算,上支撑架上框选用30 mm×3 mm的方钢,下框选用50 mm×5 mm的方钢,支撑架上框约为86.3 kg,装填装置整体质量约为234 kg,基质质量约为315 kg,计算可得支撑架应力为1.5 MPa,远小于材料的屈服极限235 MPa,符合使用强度要求。
3 控制电路设计
装填转运机一次装填要求105钵,由于装填过程的间歇特性,单次装填基质量要求基本一致,因此需要控制搅拌机出料时间来控制出料量。设备的主要用户为果农,控制电路必须安装简单、运行稳定、成本低廉。因此,装填转运设备主要采用三相交流接触器(型号CJX2-1810,额定电流20 A)与时间继电器(型号JS14P-M,延时范围0.1~99.9 s)分别控制2台电机实现基质的喂入、搅拌和出料,具体控制流程如图9。
提升电机控制电路通过双接触器控制搅拌电机正反转实现基质料斗的提升与下降;搅拌电机控制电路通过接触器控制搅拌电机的正反转实现搅拌和出料,时间继电器控制电机的反转时间。将搅拌电机控制电路与提升电机控制电路并联接入总开关与电源线。
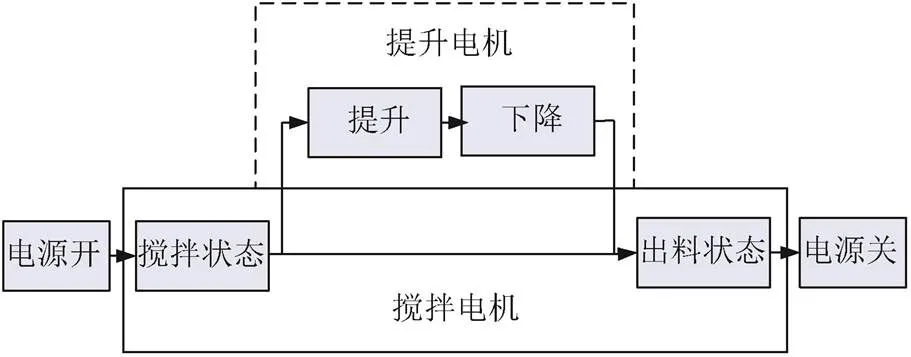
图9 控制流程图
4 样机试验
根据装填转运机关键部件及控制系统设计结果加工试验样机,如图10。通过实际的装填转运试验,考核装填转运过程的可靠性和稳定性,并用电子称(测量精度1 g;量程30 kg)分别称量一次装填完成后各苗钵的质量,测试装填的均匀性。

图10 样机试验
试验采用规格为15 cm×25 cm(口径×高)、厚度为0.02的塑料育苗钵。试验基质为华南地区沙质土壤(土壤参数见表2)。出料装置为JZC-300搅拌机(转速14.57 r/min,平均出料量300 L/min,最大单次出料量为平均出料量的1.5倍)
试验由同一人操作,将基质装入搅拌车,育苗钵放入苗钵隔间,操作转运装置运动到装填装置下方对应位置,打开控制开关,开始试验。装填完成后,关闭控制开关,操作转运装置运动到指定地点卸料,试验结束,并称量单个育苗钵装填后的质量。
当搅拌机转速达到设定转速的1/2即基质喂入速度为设定值1/2时进行试验。试验过程中,由于喂入速度较低,基本没有越过基质分流部件流入装填区域的基质,装填区域前端中间部分靠近分流板的苗钵装填速度明显低于两边的苗钵,基质损失量75 kg。
当搅拌机转速达到设定转速的3/2即基质喂入速度为设定值3/2时进行试验。越过基质分流部件流入的基质较多,整车苗钵均能正常装满,且中间苗钵装填速度明显高于两边,基质损失量68 kg。
搅拌机设定转速下,重复装填转运试验10次,平均单次基质装填量平均值330.5 kg,损失量平均值36 kg,损失率9.8%,各钵装填量最大变异系数0.6%,单次装填钵数105钵,不考虑放置空钵等准备时间,单次平均装填时间约60 s,转运装置行走速度可达到1.2 m/s,育苗钵的装料、卸载状态良好,育苗钵排列整齐,10次试验各育苗钵平均质量如表4。

表4 10次试验各育苗钵平均质量
注:表中第一行数字1~7表示育苗钵所在列。
Note: The number 1-7 in the first row of table indicates the column where the seedling pot is located.
由表4可知,第1行各育苗钵基质质量占流入第1行总基质质量的百分比分别为14.25%、14.29%、14.29%、14.25%、14.34%、14.29%和14.25%,图5所示的仿真曲线中(分流板偏移量为75 mm、高度为195 mm),区域2至区域7流入基质质量占基质总量的百分比分别为16.99%、16.56%、16.56%、16.13%、16.87%、16.91%,而仿真区域的宽度为苗钵宽度的7/6倍,按照苗钵宽度等效,流入质量占比在13.83%~14.56%之间,与试验值基本一致,验证了基质分流部件结构设计的合理性。
随着行数的增加,基质装填量少量降低,这是由于采用刮板的装填方式,靠近装填开始位置的育苗钵基质受上方刮过的基质压力作用,基质更为紧实,装填量略大,且各钵装填量大于理论装填量。10次试验中,单个育苗钵平均装填量最大值为3.23 kg,偏离平均值(3.15 kg)80 g,占2.5%,偏离理论装填量(3 kg)230 g,占7.6%,最小值为3.03 kg,偏离平均值3.8%,偏离理论装填量1%。装填量偏离均值范围为-3.8%~2.5%之间,满足苗钵装填均匀性要求。
搅拌机设定转速下,装填过程中机器运转平稳,不考虑放置空钵等准备时间,单次装填时间约60 s,装填钵数105钵,而人工装填速度每人每小时60~80个,装填效率大大提高。
5 结 论
1)研制了一种柑橘育苗钵装填转运机械,能够实现苗钵基质均匀装填、稳定转运的要求,装填效率高。
2)样机试验表明,样机结构设计合理,平均单次基质装填量330.5 kg,苗钵装填数105钵,不考虑放置空钵等准备时间,搅拌机设定转速下,装填时间约60 s,转运装置行走速度1.2 m/s,装填均匀性满足生产要求。
研究结果可为后续柑橘苗钵装填转运设备的研制和优化提供参考。
[1]郭文武,叶俊丽,邓秀新. 新中国果树科学研究70年—柑橘[J]. 果树学报,2019,36(10):1264-1272. Guo Wenwu, Ye Junli, Deng Xiuxin. Fruit scientific research in new China in the past 70 years:Citrus[J]. Journal of Fruit Science, 2019,36(10):1264-1272. (in Chinese with English abstract)
[2]单杨. 中国柑橘工业的现状、发展趋势与对策[J]. 中国食品学报,2008,8(1):1-8. Shan Yang. Present situation, development trend and countermeasures of citrus industry in China[J]. Journal of Chinese Institute of Food Science and Technology, 2008, 8(1): 1-8. (in Chinese with English abstract)
[3]陈洪明,李太盛,卢祎. 柑橘无病毒苗木繁育关键技术[J]. 南方农业,2007,1(3):33-35. Chen Hongming, Li Taisheng, Lu Yi. Key techniques of virus-free citrus seedling breeding[J]. Southern Agriculture, 2007, 1(3): 33-35. (in Chinese with English abstract)
[4]Coker R, Posadas B, Langlois S, et al. Current automation practices among greenhouse and mixed nursery/ greenhouse operations in selected Gulf South States[J]. Mississippi Agricultural & Forestry Experiment Station, 2014, 77(12): 8.
[5]Dian Y, Soranat R. Design of semi-automatic plant media bagging machine for container plant nursery[J]. Journal of Advanced Agricultural Technologies, 2018, 5(1): 36-40.
[6]Singh R R, Meena L K, Singh P. High tech nursery management in horticultural crops: a way for enhancing income[J]. International Journal of Current Microbiology and Applied Sciences, 2017, 6(6): 3162-3172.
[7]刘霓红,蒋先平,程俊峰,等. 国外有机设施园艺现状及对中国设施农业可持续发展的启示[J]. 农业工程学报,2018,34(15):1-7. Liu Nihong, Jiang Xianping, Cheng Junfeng, et al. Current situation of foreign organic greenhouse horticulture and its inspiration for sustainable development of Chinese protected agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018,34(15):1-7. (in Chinese with English abstract)
[8]辜松,杨艳丽,张跃峰,等. 荷兰温室盆花自动化生产装备系统的发展现状[J]. 农业工程学报,2012,28(19):1-8. Gu Song, Yang Yanli, Zhang Yuefeng, et al. Development status of automated equipment systems for greenhouse potted flowers production in Netherlands[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(19): 1-8. (in Chinese with English abstract)
[9]Ellis C M. Potting machines and methods: United States patent, 6594949B2[P]. 2003-07-22.
[10]Siedlaczek U. Machine for potting flower pots: United States patent, 7637052B2[P]. 2009-12-29.
[11]杨雅婷,陈永生,胡桧,等. 国内外花盆基质装填机研发现状[J]. 中国农机化学报,2013,34(1):47-50. Yang Yating, Chen Yongsheng, Hu Hui, et al. Experience of development of pot filling machine at home and abroad[J]. Journal of Chinese Agricultural Mechanization, 2013, 34(1): 47-50. (in Chinese with English abstract)
[12]张林,崔秀芳,张美斌,等. 基于育苗袋育苗法的制备机结构设计及关键部件仿真分析[J]. 福建农林大学学报:自然科学版,2019,48(4):539-545. Zhang Lin, Cui Xiufang, Zhang Meibin, et al. Structure design and key component simulation analysis of preparation machine based on nursery bag raising method[J]. Journal of Fujian Agriculture and Forestry University: Natural Science Edition, 2019, 48(4): 539-545. (in Chinese with English abstract)
[13]杨雅婷,陈永生,胡桧,等. 花盆基质装填机的设计与试验[J]. 中国农机化学报,2014,35(1):170-175. Yang Yating, Chen Yongsheng, Hu Hui, et al. Design and experiments of pot filling machine[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(1): 170-175. (in Chinese with English abstract)
[14]顾俊杰,刘斌. 盆栽花卉自动上盆设备[J]. 中国花卉园艺,2008,8(20):50. Gu Junjie, Liu Bin. Auto pot putting device for pot flower[J]. China Flowers and Horticulture, 2008, 8(20): 50. (in Chinese with English abstract)
[15]韩绿化,毛罕平,赵慧敏,等. 蔬菜穴盘育苗底部气吹式钵体松脱装置设计[J]. 农业工程学报,2019,35(4):37-45. Han Lühua, Mao Hanping, Zhao Huimin, et al. Design of root lump loosening mechanism using air jets to eject vegetable plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019,35(4):37-45. (in Chinese with English abstract)
[16]吴兆迁,史延辉. 2RJB―080型育苗基质搅拌机的设计计算[J]. 林业机械与木工设备,2012,40(9):32-34. Wu Zhaoqian, Shi Yanhui. Design calculation of 2RJB -080 nursery medium mixer[J]. Forestry Machinery & Woodworking Equipment, 2012, 40(9): 32-34. (in Chinese with English abstract)
[17]谢俊花,程改青,张飞. 营养钵装料机设计[J]. 安徽农业科学,2008(12):5235-5236. Xie Junhua, Cheng Gaiqing, Zhang Fei. Research on the design of earth bowl machine[J]. Anhui Agricultural Science, 2008(12): 5235-5236. (in Chinese with English abstract)
[18]张欣悦,李连豪,汪春,等. 2BS-420 型水稻植质钵育秧盘精量播种机[J]. 农业机械学报,2013,44(6):56-61. Zhang Xinyue, Li Lianhao, Wang Chun, et al. Type 2BS-420 precision seeder for rice seedling-growing tray made of paddy-straw[J]. Journal of Agricultural Machinery, 2013, 44(6): 56-61. (in Chinese with English abstract)
[19]柴永生,张书豹,侯庆东,等. 新型育苗钵育苗播种机的设计和结构分析[J]. 农机化研究,2014,36(2):113-116. Chai Yongsheng, Zhang Shubao, Hou Qingdong, et al. Design and analysis on a new seedling-pot seeder[J]. Journal of Agricultural Mechanization Research, 2014, 36(2): 113-116. (in Chinese with English abstract)
[20]渠聚鑫,郭克君,汤晶宇,等. 林业育苗穴盘基质装填机结构设计[J]. 农机化研究,2013,35(5):88-91. Qu Juxin, Guo Kejun, Tang Jingyu, et al. Structural design of substrate filling machine for forestry nursery plug[J]. Journal of Agricultural Mechanization Research, 2013, 35(5): 88-91. (in Chinese with English abstract)
[21]魏俞涌,陆军,盛奎川,等. 设施园艺基质填料机设计与性能研究[J]. 浙江大学学报: 农业与生命科学版,2013,39(3):318-324. Wei Yuyong, Lu Jun, Sheng Kuichuan, et al. Design and performance investigation for substrate filler in protected horticulture[J]. Journal of Zhejiang University: Agriculture and Life Sciences, 2013, 39(3): 318-324. (in Chinese with English abstract)
[22]高原源,王秀,冯青春,等. 穴盘育苗基质覆土装置的设计与试验[J]. 农机化研究,2018,40(5):98-104. Gao Yuanyuan, Wang Xiu, Feng Qingchun, et al. Design and experiment of soil-covering device of plug seedling[J]. Journal of Agricultural Mechanization Research, 2018, 40(5): 98-104. (in Chinese with English abstract)
[23]张洋,范开钧,初麒,等. 育苗纸钵自动装盘装置的试验研究[J]. 农机化研究,2020,46(4):180-183. Zhang Yang, Fan Kaijun, Chu Qi, et al. Experiment study on seedling paper-pot automatic feeding device for plug tray[J]. Journal of Agricultural Mechanization Research, 2020, 46(4): 180-183. (in Chinese with English abstract)
[24]白帆,吴昊,肖冰,等. 国内外林木育苗生产技术装备概述[J]. 林业机械与木工设备,2018,46(1):4-12. Bai Fan, Wu Hao, Xiao Bing, et al. Overview of tree seedling production technology and equipment at home and abroad[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(1): 4-12. (in Chinese with English abstract)
[25]中国农业机械化科学研究院. 农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007:563.
Design and test of seedling pot filling and transporting machine for citrus
Xu Qinchao, Li Shanjun※, Zhang Yanlin, Meng Liang, Lu Hong’an, Xie Lin
(,,,,430070,)
Container seedling raising of citrus has the advantages of fast survival and high survival rate after transplanting, and is becoming the main way of citrus cultivation. At present, the level of mechanization of vitrus container seedling cultivation in China is very low, mainly relying on manual operation, especially seedling pot filling, with high labor intensity and low production efficiency, which has become the main obstacle of industrial development. In order to sole this problem, a mechanical solution of filling and transporting 105 pots at one time was proposed. The machine consists of two independent parts: filling device and transporting device. The filling device included frame, scraping mechanism and driving mechanism; the transporting device included frame, power system, driving mechanism and steering mechanism. Before filling, he unlocking device was set to unlocking state. Then, the operating rod of the linkage mechanism was moved to the unlocking device and locked. At the same time, the flaps of the linkage mechanism moved to the horizontal filling state. Secondly, opened the seedling pots, putted the pot into the compartment in turn and covered with covering plate. Thirdly, started the transporting device, and moved the transporting device to the filling position with the guidance of the guiding wheel on the transporting device and guiding rail on the filling device. Then, turned on the control switch, the filling and transporting machine started, the substrate was scraped into the seeding pots after separating by the splitter plate. After filling, started the transporting device and moved it to unloading position. Unlocked the unlocking device, and moveed the operating rod of the linkage mechanism to the unloading state. The flaps moved to the vertical position under the action of the linkage mechanism, and the seedling pots in the compartments falled under the action of gravity. The optimal offset and height of splitter plate were determined based on the analysis of the substrate flow process by EDEM software, the scheme of the unloading part was designed, the length of each rod was calculated, the strength of the frame was analyzed, and the parameters of the frame were determined. Based on this, the control circuit was designed and the test prototype was made. The experimental results showed that the prototype machine ran stable in 10 tests, the mean substrate filling amount was 330.5 kg, the filling number of seedling pots was 105, the filling time was about 60 s under the setting speed of mixer,, the speed of the transport device was 1.2 m/s, and the seedling pots were unloaded and aligned well. The maximum average filling amount of single seedling port in 10 tests was 3.23 kg, which was 2.5% higher than average filling amount, and the minimum average filling amount of single seedling port in 10 tests was 3.03 kg, which was 3.8% lower than average filling amount. The designed machine can provide reference for the development and optimization of the citrus seedling pot filling and transporting machine.
agricultural machinery; design; experiments; citrus; seedling pot; filling; transporting; EDEM
徐勤超,李善军,张衍林,等. 柑橘育苗钵装填转运机设计与试验[J]. 农业工程学报,2020,36(18):66-72.doi:10.11975/j.issn.1002-6819.2020.18.009 http://www.tcsae.org
Xu Qinchao, Li Shanjun, Zhang Yanlin, et al. Design and test of seedling pot filling and transporting machine for citrus[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(18): 66-72. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.18.009 http://www.tcsae.org
2020-04-09
2020-07-28
重庆市技术创新与应用发展专项重点项目(cstc2019jscx-gksbX0095);现代农业(柑橘)产业技术体系建设专项资金项目(CARS-26);国家重点研发计划(2017YFD0202001);柑橘全程机械化科研基地建设项目(农计发[2017]19号)
徐勤超,博士,讲师,主要从事水果生产机械化技术与装备研究。Email:hlxqc@mail.hzau.edu.cn
李善军,博士,副教授,博士生导师,主要从事水果生产机械化技术与装备研究。Email:shanjunlee@mail.hzau.edu.cn
10.11975/j.issn.1002-6819.2020.18.009
TP241.3;S225.93
A
1002-6819(2020)-18-0066-07
猜你喜欢
预防青少年犯罪研究(2022年1期)2022-08-15
地理空间信息(2022年3期)2022-04-01
食用菌(2021年6期)2021-12-30
民间故事选刊(2021年9期)2021-11-12
读者(2020年15期)2020-07-31
电子技术与软件工程(2019年21期)2020-01-16
计算机辅助工程(2018年4期)2018-10-09
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
价值工程(2018年13期)2018-05-03
伴侣(2018年2期)2018-02-28
