
高级驾驶辅助系统(Level 2)开发研究
2020-12-02 03:11何班本文翊刘帅
汽车文摘 2020年12期
何班本 文翊 刘帅
(东风汽车公司技术中心,武汉430056)
主题词:自动驾驶 高级驾驶辅助(ADAS) 硬件构架 网联构架
缩略语
ADAS Advanced Driving Assistance System ESC Electronic Speed Controller EPS Electric Power Steering EMS Engine Management System VCU Vehicle control unit ACC Adaptive Cruise Control LDW Lane Departure Warning System LKA Lane Keep Assistant System LCA Lane Center Assistant System ICA Intelligent Cruise Assist
0 引言
汽车市场的竞争早已进入白热化状态,目前,汽车的客观性指标(汽车性能、配置、可靠耐久性、动力经济性)已经成为业界的基础标准。汽车消费者不仅仅把目光聚焦在品牌、外观、内饰等因素上,也开始关注车辆的智能辅助驾驶等科技技术。
1 高级驾驶辅助系统(ADAS)
高级驾驶辅助系统(ADAS, Advanced Driving Assistance System)利用传感器(包括雷达、摄像头以及卫星导航等),在汽车行驶过程中,实时感应周围环境、收集数据、感知融合。通过ADAS控制器,对感知数据进行决策分析,最后控制执行机构(ESC、EPS、EMS 或VCU)对车辆进行控制,实现高级辅助驾驶功能。
1.1 自动驾驶分级及高级辅助驾驶
如表1所示,参考SAE自动驾驶等级划分,将自动驾驶划分为6个等级,Level 0仅针对辅助驾驶中的报警阶段;Level 1是辅助驾驶;Level 2是部分自动驾驶;Level 3 是有限自动驾驶;Level 4 和Level 5 则是高度和完全自动驾驶[1]。高级辅助驾驶(ADAS)主要是针对自动驾驶的Level 0、Level 1、Level 2,从Level 2跨越到Level 3是高级驾驶辅助实现质的飞跃,技术最难突破。目前国内智能汽车技术的发展还处于辅助驾驶阶段,距离最高层次的无人驾驶尚需时日。
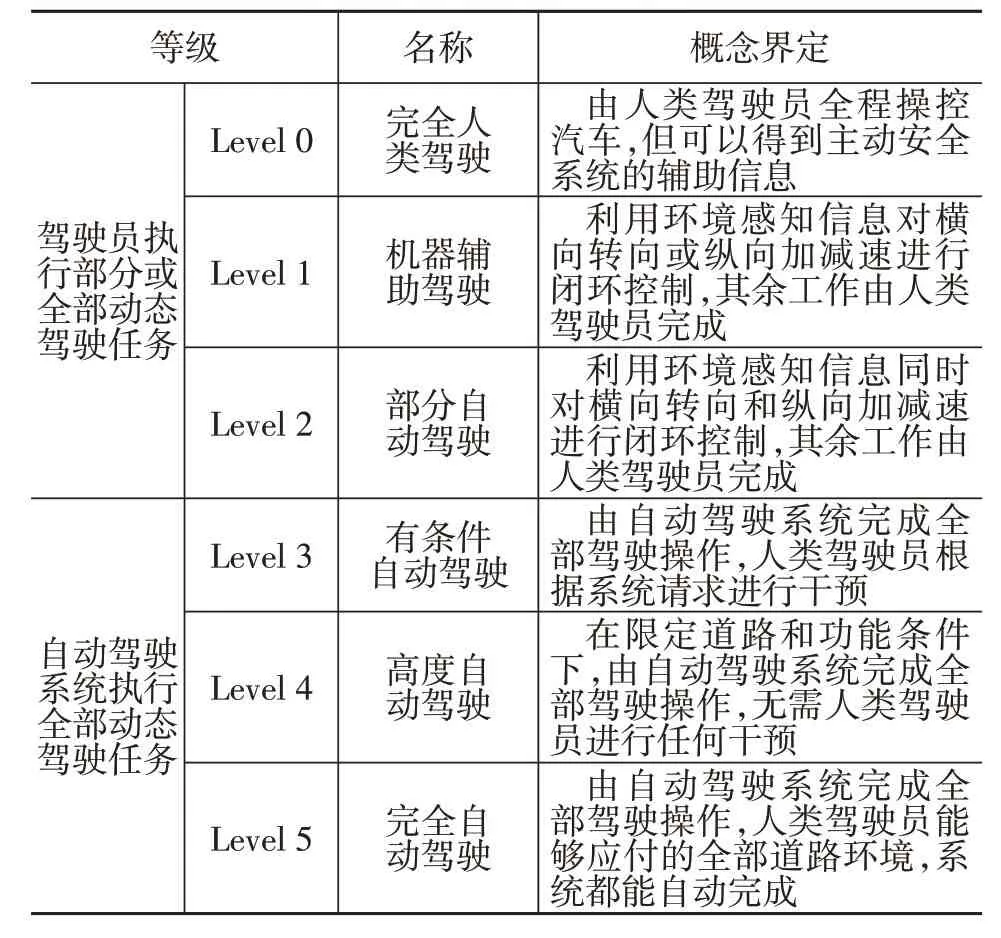
表1 自动驾驶系统分级[1]
1.2 高级驾驶辅助系统(Level 2)
目前国内已实现自动驾驶Level 2 级别高级驾驶辅助系统(ADAS),现介绍Level 2级别的ADAS系统。
Level 2 级别的ADAS 系统利用环境感知传感器(前毫米波雷达、前摄像头),在汽车行驶过程中,感知周围的道路环境。控制单元对环境原始数据进行融合处理,并替代驾驶员分析决策车辆下一步运动状态,通过给EPS、ESC、EMS/VCU发送相应指令,对车辆横向和纵向进行闭环控制[2]。
(1)Level 2 级别的ADAS 系统实现横向和纵向控制的主要功能
ACC-自适应巡航:能实现全速范围(0~150 km/h)内控制本车跟随前车起步或者停下;
AEB-自动紧急制动:AEB-C 能针对前车紧急制动工况,辅助本车驾驶员制动,以避免或者减缓碰撞,AEB-P能针对本车前方横穿行人工况,辅助本车驾驶员制动,以避免或者减缓碰撞;
FCW-前碰撞预警:在与前车存在追尾碰撞危险时,通过报警提醒驾驶员及时制动;
LDW-车道偏离预警:高速工况下驾驶员无意识偏离车道时对驾驶员进行提醒;
LKA-车道保持辅助:高速状态下,若车辆偏离车道且未开启转向灯,系统自动提供方向盘纠正力矩对车辆进行纠偏;
LCA-车道居中辅助:高速状态下,采用自动转向控制,形成横向控制的持续干预,确保车辆一直在车道中间。
(2)Level 2级别的ADAS系统硬件架构
车辆增加前毫米波雷达和前摄像头便能实现Level 2 级系统功能,相应的系统硬件架构包括:前毫米波雷达、前摄像头、ESC、EPS 和EMS/VCU(ADAS 执行机构),以及快拨键和组合仪表(ADAS 人机交互),如图1所示。
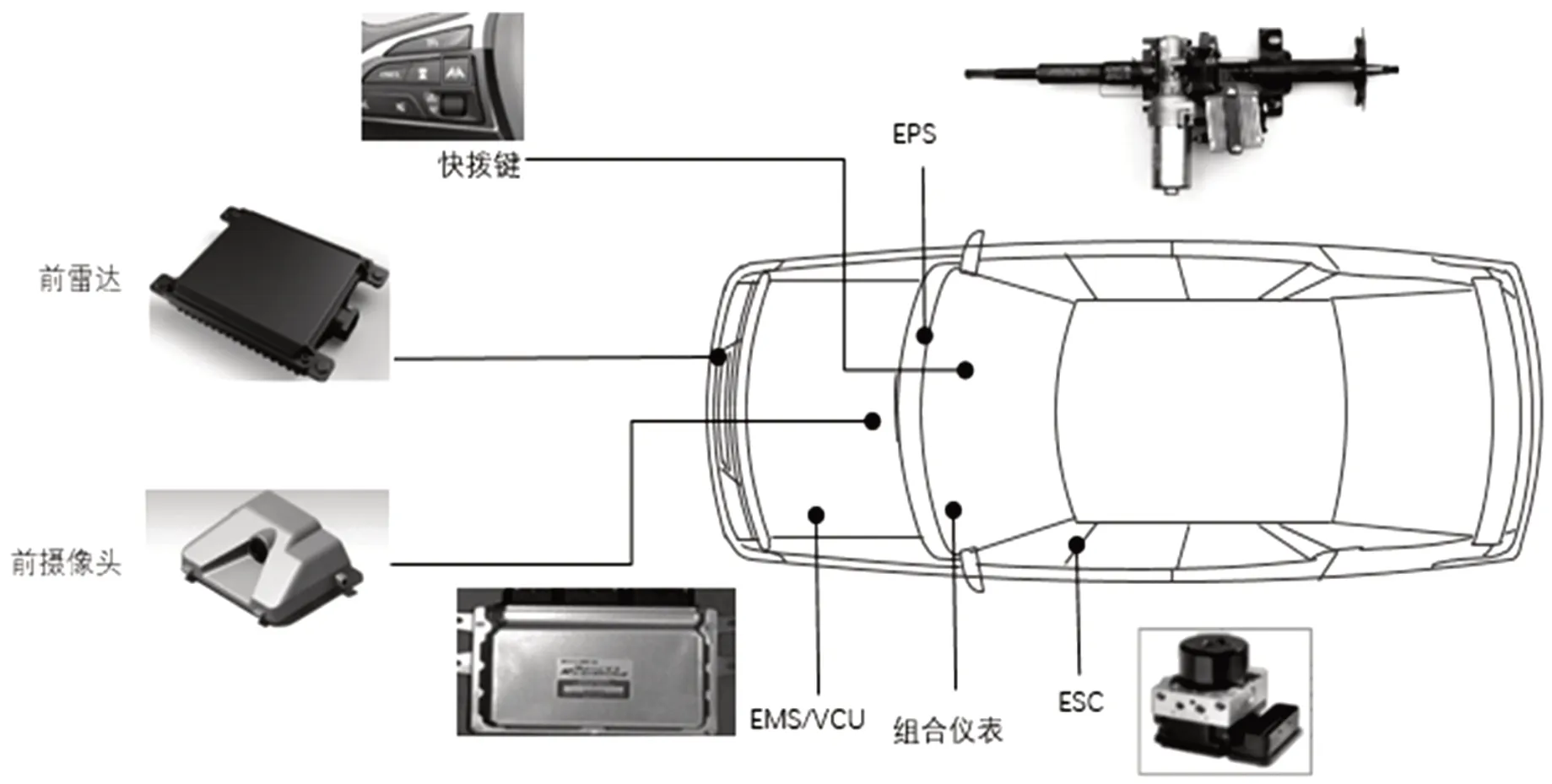
图1 Level 2级别的ADAS系统硬件架构
(3)Level 2级别的ADAS系统网络架构
实现Level 2级系统功能,驾驶员通过方向盘快拨键或MP5开启ADAS 相关功能,通过网关将开启功能信号发送至整车CAN总线,雷达和摄像头对环境进行感知,控制器将决策控制信号发送给执行机构(ESC、EPS、EMS/VCU),同时将ADAS 状态信息通过网关发送给仪表,如图2所示。
2 基于某款电动汽车的ADAS(Level 2)系统开发
高级驾驶辅助系统Level 2开发,分为系统软件开发和系统整车集成开发。本文介绍ADAS系统整车集成开发,主要分为需求定义阶段、方案详细设计阶段、方案验证及完善阶段、产品投放阶段。本文以某款纯电动汽车项目的Level 2级别的ADAS系统开发为例,进行开发说明。
2.1 需求定义阶段
根据配置定义和整车参数性能要求,对ADAS 系统完成竞品分析、功能可行性及需求分析、系统功能定义及方案构想设计,如表2所示,同时完成零部件布置及接口设计、供应商定点、关联系统初步需求发布、确定功能安全目标。
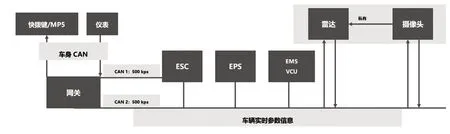
图2 Level 2级别的ADAS系统网络架构

表2 ADAS 功能包及配置
2.2 方案详细设计阶段
签订系统开发合同和技术协议,开展产品详细设计:包括确定系统技术规范、完善功能性能定义、系统用电信息表、布置接口定义、功能安全定义、以及对VCU/ESC/EPS/IC/MP5/BCM/线束/等相关系统需求文档编制和固化,最后制定智能驾驶系统诊断协议和下线检测方案,形成诊断规范,完成产品认可。下面以布置接口定义和对相关系统需求进行详细说明。
2.2.1 布置接口定义
根据雷达性能参数要求、车身造型,设定前雷达合理的布置位置。雷达离地高度(雷达天线轴到地面的垂直距离)推荐50 cm 左右,但当离地高度接近30 cm 可能会有过多的地面反射信号干扰。雷达与保护盖之间的距离大于8 mm(2 倍波长,避免复杂近场对雷达波束的影响)且小于50 mm(避免过大的雷达波相交面)。雷达横向位置坐标在-30 cm~30 cm。

图3 ADAS前雷达和前摄像头布置示意
如图3 所示,前摄像头最好的垂直安装位置是挡风玻璃的中心,但允许偏移挡风玻璃中心线10 cm 以内。支架应该安装在干净的玻璃区域内,保证摄像头视角区域不能被绢印或者被其它物体遮挡。镜头模块与挡风玻璃之间应该保证至少1 mm的间隙。开口应该由投影在挡风玻璃各层的视角决定,支架安装在挡风玻璃的位置公差通常是±1 mm(定位)和±2.5°(旋转),如图3。
2.2.2 相关系统需求
Level 2级别的ADAS系统的典型代表功能是ICA(Intelligent Cruise Assist)单车道智能巡航控制,融合了对车身的纵向(全速自适应巡航控制)和横向(车道居中辅助)的控制,从而在减轻驾驶疲劳的同时保证在拥堵状况下的行车安全。该系统可以根据路况选择跟随前车或将车身保持在车道中央。
(1)相关舒适性要求
系统控制车辆沿中心线行驶,行驶范围距离中心范围误差不超过20 cm,侧向加速度控制在±3 m/s2内;平路巡航速度控制精度±1 km/h, 坡路巡航速度控制精度±3 km/h;在车速高于20 m/s 后,最大减速度不得超过3.5 m/s2;当车速低于5 m/s后,最大减速度不得超过5 m/s2。
(2)相关执行机构(VCU/ESC/EPS)性能要求
对关联控制器要求—VCU:车轮端真实扭矩(整车控制器在CAN上发送的值)和实际(物理)车轮端扭矩的延迟不能超过200 ms,最大偏差±40 N·m;初始请求的扭矩和实际(物理)轮端扭矩延迟不能超过700 ms;请求的扭矩和实际(物理)轮端扭矩延迟不能超过300 ms,如图4所示。
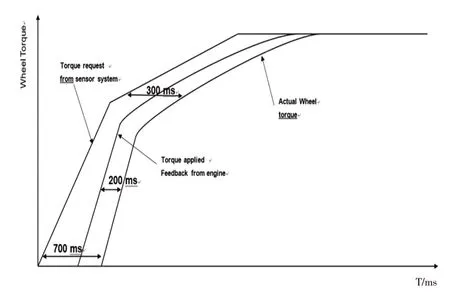
图4 ADAS 对VCU扭矩要求
关联控制器要求—ESC:AEB 制动过程中需要启动车身稳定控制,制动系统优先保证车身稳定;制动系统应正确响应ADAS 发出的prefill 请求;制动系统在响应ADAS 减速请求时应点亮制动灯;ADAS 请求发出到开始刹车的延迟时间应小于60 ms;为了保证刹车性能,在达到稳定的减速值前,超调值不应大于实际请求值的30%;主车执行自动刹车刹停后,刹车系统应该保持有足够的制动力以在1.5 s 内使车辆保持停止,如图5所示。

图5 ADAS对ESC要求
对关联控制器要求—EPS:在ADAS 功能发出目标转角/扭矩后,EPS对此信号能较好的响应。响应延迟小(跟踪误差<100 ms),不允许存在与目标信号相反的偏差(无下冲),最大稳定时间<150 ms,尽可能避免超调(超调量<5%或1°,以较高者为准),稳态误差控制在一定的范围内(<3%或0.5°或0.1+0.1×目标转角值,较大者为准),如图6。

图6 ADAS对EPS要求
2.2.3 相关系统联合调试
在对各相关系统确定需求后,根据项目开发周期和不同阶段样车状态,需开展约3次大范围的联合调试以逐步确定信号的稳定连接、功能的实现、性能的达成,见表3。
2.3 方案验证及完善阶段
2.3.1 方案验证
硬件在环仿真测试系统,以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O 接口与被测ECU 连接,搭载整车后,在整车层面上进行全方位的功能、性能试验,同时验证ADAS 系统的可靠性、稳定性。

表3 ADAS/ESC/EPS/VCU联合调试
试验策划包括试验时间设置、试验公里数设置、试验场景设定、试验设备选择。试验周期的设定依据试验公里数和试验车辆台数确定,一台车按每天约500 km 计算。试验公里数按照经验值设定:ADAS系统第一次搭载整车项目,试验公里数建议不少于600000 km;ADAS 系统进行动力总成变化等适配项目,试验公里数建议不少于50000 km。
依据ADAS系统的功能/性能设定试验场景,逐项对功能/性能达成情况进行点检。自动驾驶Level 2 级别的ADAS系统的典型特征是能同时对车辆纵向及横向进行控制,下面以纵向控制(ACC)进行简要说明。用目标车以恒定速度切入到测试车辆后方为例,进行测试案例介绍。
对于HOST车辆(测试车辆),驾驶员启动ACC,设定巡航速度为100 km/h,设定车间时距3 s,切入距离20 m;对于LV 车辆(目标车辆),设定速度80 km/h,当HOST车辆切入约1 s后目标车辆减速;
要求自适应巡航系统减速平稳,无制动系统过度制动现象;要求自适应巡航系统减速过程中,无明显的噪音及振动产生;要求车辆达到稳态定速巡航后,实际车速与巡航设定车速间的误差小于3 km/h.;要求车辆减速度低于减速度上限;要求车辆减速度变化低于减速度变化上限;要求系统能够在自车开始侵入前车车道前识别前车为非自车车道车辆,在自车侵入前车车道半个车身后识别前车为自车车道车辆,如表4。

表4 ACC测试场景
2.3.2 方案完善
方案完善阶段,对ADAS 专项试验过程中发现的质量问题,进行原因分析、对策制定、方案修改装车、改善效果确认。下面以在Level 2 级别的ADAS 系统开发过程中的一起质量问题进行说明。
问题描述:ACC 激活,设定车速74 km/h,超越模式下,实际车速80 km/h,自车前方有目标车,车距较远,驾驶员松开油门踏板后,自车开始减速到26 km/h,直到目标车消失,自车才开始加速。
原因分析:ACC 应用PID 控制策略将加速请求转化成扭矩请求。电动车可以提供比燃油车大很多的负扭矩以支持ACC 减速,在驾驶员接管控制时,ACC计算减速度请求,并一直进行负扭矩请求,这个过程中积分项一直累加负扭矩,直到最大负扭矩,当松开油门后ACC请求正扭矩,实际请求扭矩会从该负扭矩开始请求,导致减速感受差。
对策制定:更新ACC 控制模块,在软件中增加I Gain的重置。当驾驶员松开油门踏板后,系统由ACC Override 模式切换到ACC 系统控制模式,将ACC 在Override模式下的I Gain累积的负偏差量请求重置,可立即从极低的负扭矩请求重置回到正扭矩请求。
改善效果确认:将更新优化后的软件刷写到试验车辆,进行验证。试验车测试效果良好,如图7所示。
3 结语
ADAS 系统由驾驶员来决定驾驶权的分配,环境感知传感器(前雷达和前摄像头)对车道线和车辆的识别率达到92%~95%,但还是存在漏报危险,因此驾驶员必须承担完整的环境感知和车辆操纵任务。使用单车道智能巡航控制功能时,驾驶员仍需要持续监控整个系统,且双手不能脱离方向盘。在需要驾驶员接管的情况下(如转向、超车、并道、系统故障、意外操作等),驾驶员需要承担驾驶工作。

图7 ACC测试数据分析
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
汽车实用技术(2022年2期)2022-02-21
卫星应用(2021年11期)2022-01-19
智能建筑与工程机械(2021年6期)2021-09-10
汽车电器(2021年6期)2021-07-05
科技创新导报(2021年33期)2021-04-17
