基于CAN总线的光伏集散电源控制系统通信网络设计
2020-11-30 09:11:54陈艺峰朱淇凉
控制与信息技术 2020年5期
任 艺,王 南,陈艺峰,朱淇凉
(株洲中车时代电气股份有限公司, 湖南 株洲 412001)
0 引言
集散式光伏并网发电系统主要由光伏阵列、集散电源和并网逆变器组成。集散电源代替了集中式光伏并网发电方案中的直流汇流箱,并且集成了多路最大功率点跟踪(maximum power point tracking, MPPT)控制功能和DC/DC升压功能[1-4];其内部含有多个DC/DC升压变换器模块,每个模块的若干光伏组串共用一个MPPT控制器,且各个MPPT控制器之间为分散控制。集散电源内部的系统控制器与各个MPPT控制器通过通信总线进行连接,构成双层自律协同控制系统,实现系统协同控制[5]。以往集散电源的通信总线采用RS485主从协议,其特点是从站不可主动发送报文帧,除非收到了主站相应的请求帧。系统控制器获取每个MPPT控制器数据时,需要一个个轮询,当通信报文发生误码或DC/DC升压变换器被从系统中切除时,系统控制器会等待一个超时时间后才会继续发送请求帧,应答等待及收发切换时间的存在降低了系统的实时性,并且可能引起MPPT控制器的故障信息和实时数据的超时传递。本文采用多主通信方式的CAN总线替代主从通信方式的RS485总线,并基于CAN动态优先级分配算法,提出了一种记忆平衡设定初始优先级的方法。采用该总线协议可有效降低网络时延,提升网络实时性,并且节点配置灵活,可通用于不同MPPT个数的集散电源。
1 控制系统架构
集散电源采用分散控制、集中管理的方式,形成双层自律协同的控制系统(图1)。多台DC/DC升压变换器内部的MPPT控制器组成了分散控制层,对该升压变换器所接若干光伏组串进行MPPT寻优控制。各MPPT控制器完全独立运行,相互间无任何信息交换。系统控制器为集中控制层,接收每个光伏组串的工作参数并监测各光伏组串的电压和电流,以进行系统级监控和管理[5]。基于技术和成本方面的考虑,目前集散电源内部MPPT控制器的个数NM一般为3~8个;但为了更好地适配光伏组串的辐照情况,提升系统的发电量,集散电源内部MPPT控制器的个数可多达16个[5]。
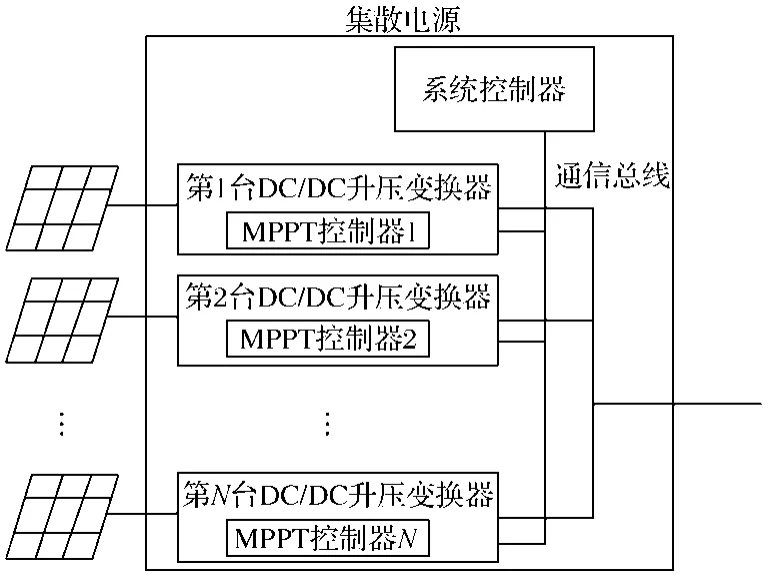
图1 集散电源双层自律协同控制系统框图Fig. 1 Block diagram of double-layer cooperative control system for D&C PV system
集散电源在运行过程中,若DC/DC升压变换器存在故障停运或组串未接现象,为不影响集散电源的正常运行,可以将其从通信网络中切除;一旦DC/DC升压变换器模块发生严重故障或异常,则立即通知系统控制器。
2 网络协议设计
CAN总线具有如下特点[6-7]:(1)为多主方式工作,网络上任一节点都可以在任意时刻主动地向网络上发送信息;(2)采用CSMA/DC(载波监听多点接入/碰撞检测)协议,当多个节点同时向总线发送信息时,优先级高的继续发送,优先级低的则主动退出发送状态,等待下一次发送机会;(3)采用短帧结构并且每帧信息都有CRC校验,传输时间短,受干扰概率小,并且具有极低的错误率;(4)CAN总线具备错误处理功能,在节点发生严重错误的情况下可自动关闭该节点的输出功能,以使总线上其他节点的通信不受影响。
虽然CAN总线在网络利用率低时具备良好的通信实时性,但当网络节点增多、传输数据量增大时,CAN节点通信帧之间的碰撞可能导致低优先级通信帧的通信延时过长,甚至一直无法成功发送。于是,学者们提出了时分复用及动态优先级分配的方法来提高周期性数据及非周期性数据的实时性[8]。基于此,本文设计了一种集散电源控制系统通信网络拓扑(图2),其CAN协议只包括了开放系统互连基本参考模型(open systems interconnection reference model, OSI/RM)的第一层(物理层)和第二层(数据链路层);在这两层的基础上设计应用层协议,包括帧标识符设计和帧数据段设计。
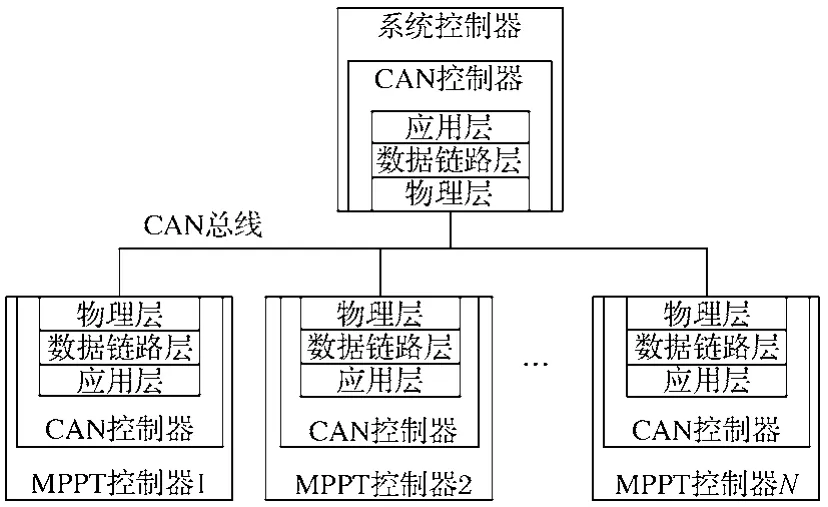
图2 集散电源控制系统通信网络拓扑Fig. 2 Communication network topology of the control system for D&C PV system
2.1 帧标识符设计
通信网络中传递的数据主要为系统控制器的控制指令和MPPT控制器的实时数据及故障信息。基于这些数据的优先级及动态优先级分配方法,设计标准帧标识符定义,如表1所示。
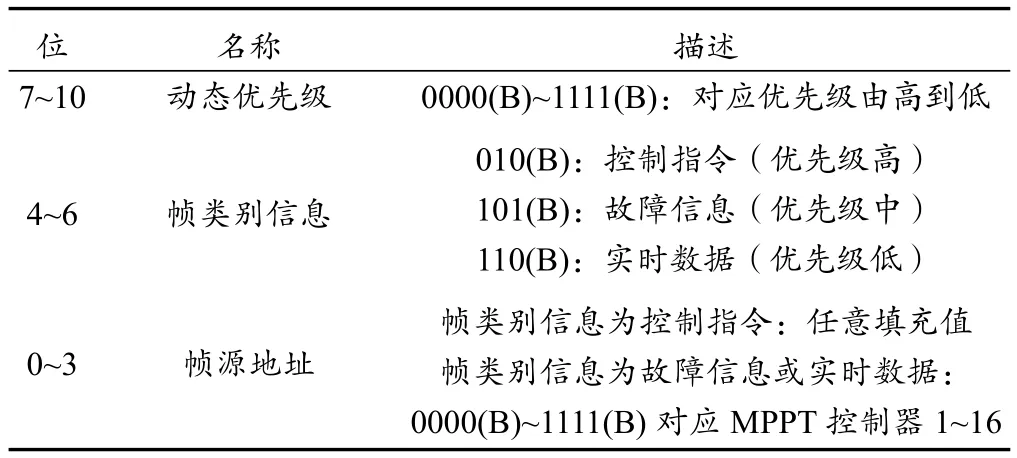
表1 帧标识符定义Tab. 1 Definition of frame identifier
2.1.1 动态优先级分配方法
CAN优先级的意义在于在有限的通信带宽中确保优先级高(实时性要求高)的通信帧优先发出,延时最短。但标识符中一般也存在与实时性要求无关的部分,如源地址。动态优先级分配法的主要思想为分离CAN标识符的优先级部分和标示部分,在通信帧仲裁失败时可提升其优先级来减小通信延迟。
通信帧初始优先级P0和提升后优先级P的关系为[8]

式中:f(n)——优先级提升的大小;n——仲裁失败的次数。
若采用线性方式提升优先级,则f(n)=kn,k为优先级提升系数。
2.1.2 记忆平衡方法
综上可知,动态优先级分配方法增加了低优先级通信帧在仲裁失败重发时的成功率。但是,该节点在下次发送通信帧时依然会变回初始优先级,这使得网络内不同节点发出的同帧类别信息的通信帧其优先级排序大体上还是按照该节点对应的源地址的大小进行。为此,本文提出一种记忆平衡的方法来动态定义初始优先级:当某节点由于仲裁失败导致优先级升级为Pn时才发送成功,则下一次该节点发送同类型通信帧时,初始优先级直接为Pn;若其依然仲裁失败,则按原优先级提升方法继续提升。
2.1.3 特殊初始优先级定义
所有通信帧中,优先级最高的为触发发送的系统控制器的控制指令和MPPT控制器的故障信息。这些数据触发发送时,初始优先级最高,为0000(B)。
2.2 帧数据段设计
由于每个帧数据段内部最多可传递8个字节,而单个MPPT控制器的实时数据及故障信息超过8个字节,单帧无法完成传输,所以本文采用多数据帧分节传输的方式。设计数据段的构成如表2所示,其中前2个字节(DATA7和DATA6)为数据组序号,后6个字节为数据内容。

表2 帧数据段的构成Tab. 2 Composition of frame data segment
3 应用计算分析
网络时延是衡量网络实时性能的指标。同时,根据排队理论,当网络的利用率增大时,网络引起的时延也会增大,甚至在极端情况下会导致时延变为无穷大[7-8]。因此,本文对集散电源控制系统通信网络采用RS485协议及CAN协议的总线利用率和网络时延这两个性能指标进行分析。
3.1 总线利用率
在不考虑非周期性通信帧及通信错误的情况下,NMMPPT集散电源控制系统的通信网络使用Modbus-RS485协议和CAN协议的总线利用率U的计算分别见式(2)和式(3):
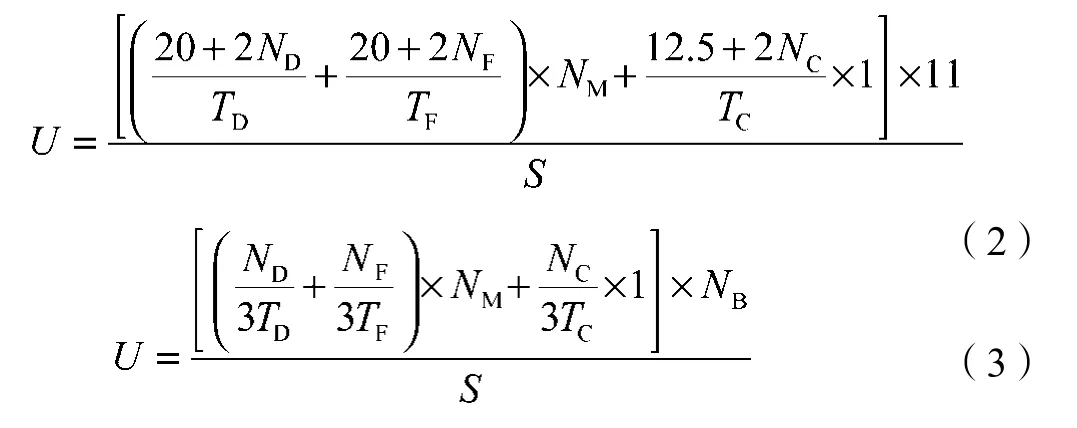
式中:ND和TD——实时数据的数据个数和发送周期;NF和TF——故障信息的数据个数和发送周期;NC和TC——控制指令的数据个数和发送周期;NB——一帧数据包含的位数(包含帧间隔);若数据段含8个字节,则NB的最大值和最小值分别为135(NBmax)和111(NBmin)[9];S——通信网络速率。
式(2)未包含系统控制器和MPPT控制器的收发切换时间、MPPT控制器的应答延时及系统控制器的请求间隔时间。式(3)中,ND,NF,NC为3的倍数。
假定ND,NF和NC分别为18、18和3,TD,TF和TC分别为250 ms、100 ms和100 ms,RS485(不含延时)、RS485Delay(含收发延时1 ms)、CANMin(NB取NBmin)、CANMax(NB取NBmax)在网络速率为100 kb/s和250 kb/s时总线利用率的计算值分别见表3和表4。分析结果表明:在节点通信数据量大时,RS485总线利用率略低于CAN的,但若考虑控制器的收发延时,则RS485总线利用率会大幅增加。
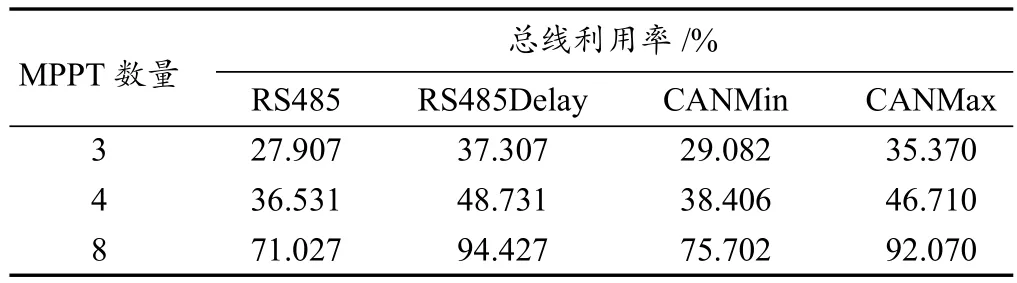
表3 100 kb/s速率时总线利用率估算值Tab. 3 Estimate values of bus utilization at 100 kb/s
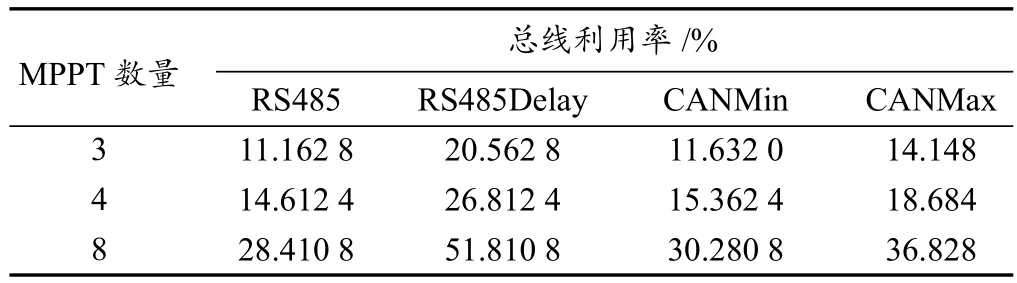
表4 250 kb/s速率时总线利用率估算值Tab. 4 Estimate values of bus utilization at 250 kb/s
3.2 网络时延
网络时延由发送时延、传播时延、处理时延和排队时延4个部分组成[7]。由于通信总线布置在集散电源内部,总线长度较短,并且现代处理器的运算速度较快,故本节估算时忽略传播时延和处理时延,则网络时延[10-11]为

式中:tm——信息m的排队时延;Cm——信息m的发送时延。
若使用Modbus-RS485协议,则当m为控制指令时,tm为上一请求及应答帧占用总线的时长;当m为故障信息时,tm为从故障信息生成到轮询时间之间的时间差,均值可取TF/2;当m为实时数据时,在不考虑通信异常(即:轮询周期完全固定)时,tm可忽略。控制指令和非控制指令信息的发送时延分别为式(5)和式(6):
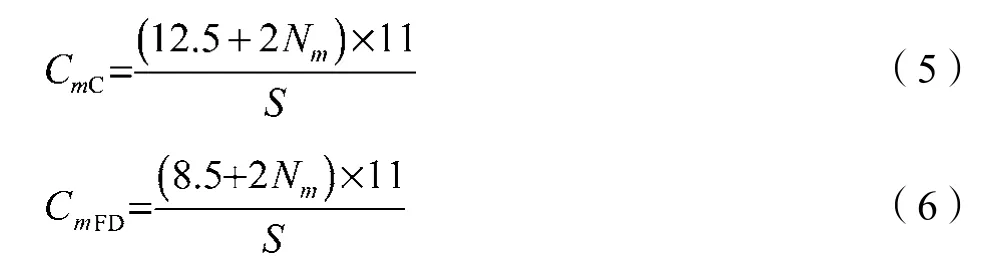
式中:Nm——信息m中包含的数据个数。
若使用CAN协议,则tm的数学期望见式(7)[10-11]:

式中:h(m)——优先级高于信息m的报文集合;Tj——优先级高于信息m的报文平均传输周期,Cj——平均传输时间;τbit——总线上传输一个位所需要的时间。
假定通信网络的协议内容(数据个数及时间周期)与3.1节所述的一致,且CAN动态优先级分配方法中的初始优先级P0和提升后优先级P的关系为P=P0-n。在不考虑非周期性通信帧及通信错误的情况下,4 MPPT集散电源控制系统通信网络在通信速率为100 kb/s时,估算触发发送的控制指令和故障信息及周期发送的实时数据的网络时延,具体见表5~表7。
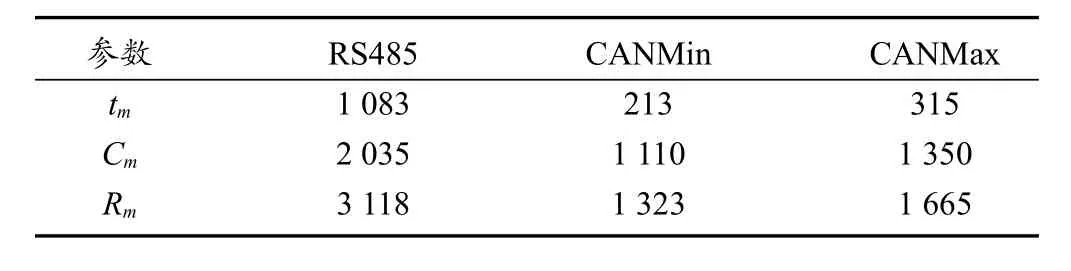
表5 4 MPPT集散电源(通信速率100 kb/s)控制指令报文的网络时延估算值Tab. 5 Network delay estimate values of control instruction message for 4 MPPT D&C PV system(Communication rate is 100 kb/s) (单位:μs)
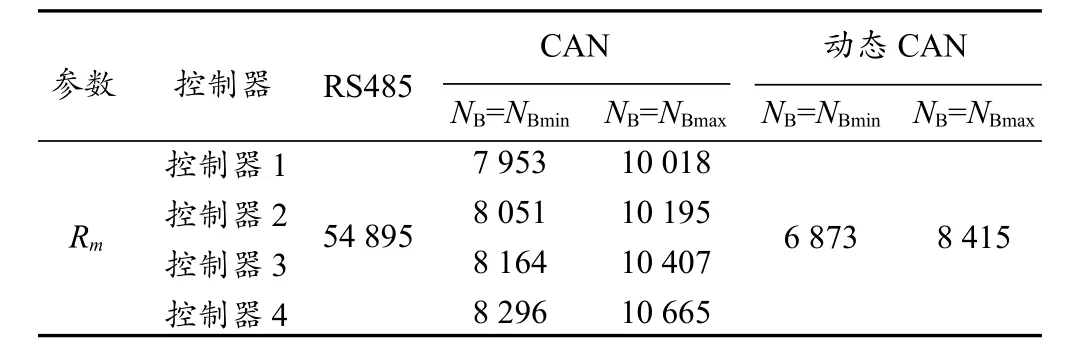
表6 4 MPPT集散电源(通信速率100 kb/s)故障信息报文的网络时延估算值Tab. 6 Network delay estimate values of fault information message for 4 MPPT D&C PV system(Communication rate is 100 kb/s) (单位:μs)
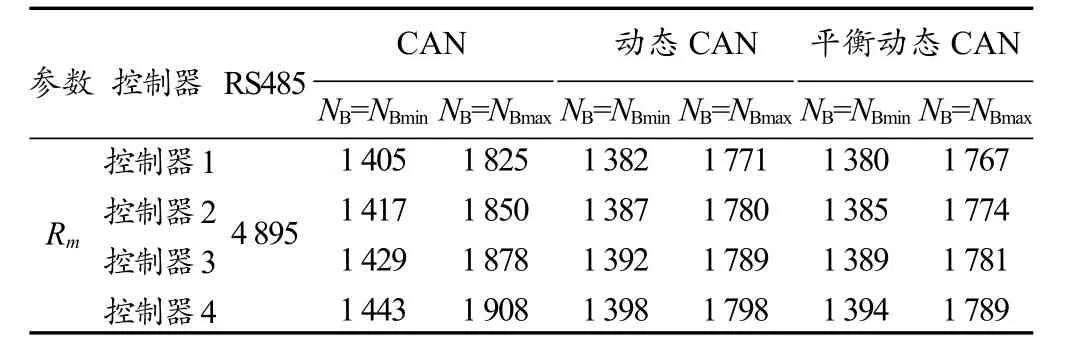
表7 4 MPPT集散电源(通信速率100 kb/s)实时数据报文的网络时延估算值Tab. 7 Network delay estimate values of real-time data message for 4 MPPT D&C PV system(Communication rate is 100 kb/s) (单位:μs)
表5~表7分析结果表明:(1)以CAN协议中优先级最低、网络时延最长的控制器4为例,使用CAN协议替代RS485协议后,其故障信息、控制指令和实时数据的网络时延分别缩短了约82.7%、52.1%和65.8%(NB取均值)。CAN独特的短帧结构使得在单次需要传输的数据量较少时,传输时延和排队时延有效缩短;多主工作方式的CAN协议使得MPPT控制器的故障信息可以主动发送,从而有效缩短了故障信息的排队时延。(2)以CAN协议中优先级最低、仲裁失败概率最高的控制器4为例,使用动态优先级分配方法后,其故障信息和实时数据的网络时延分别缩短了约17.2%和3.1%,而且MPPT控制器之间的实时数据网络时延缩短了约57.9%(NB取NBmin)。动态优先级分配方法和特殊初始优先级的定义,减少了触发发送的故障信息及周期发送的实时数据的排队时延,并且缩短了MPPT控制器之间发出数据的网络时延,有效避免了编号最大MPPT控制器发出的数据帧总是仲裁失败的情况。(3)记忆平衡方法进一步优化了动态优先级分配算法的结果。采用记忆平衡方法后,MPPT控制器之间的实时数据网络时延缩短了约12.5%(NB取NBmin)。
4 结语
本文采用多主通信方式的CAN总线替代原有主从通信方式的RS485总线,大幅缩短了通信总线的网络时延;在采用了动态优先级分配方法和记忆平衡方法后,最大限度地缩短了网络内实时性要求最高的通信帧的网络时延,并缩短了MPPT控制器之间发出数据的网络延时差。替代后,总线的实时性有很大提高,并且节点配置灵活,可通用于不同MPPT个数的集散电源。但在本文的分析过程中,未考虑通信错误的情况且忽略了处理器的处理时延,后续将继续对这部分进行分析试验,并依据通信帧的详细优先级需求,优化动态优先级的提升方式及初始优先级的定义方法。
猜你喜欢
装备维修技术(2021年37期)2021-11-03 20:39:09
现代电子技术(2019年15期)2019-08-12 06:15:44
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年6期)2018-11-25 09:50:10
测控技术(2018年8期)2018-11-25 07:42:08
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
科技视界(2016年13期)2016-06-13 23:11:43
电测与仪表(2016年17期)2016-04-11 12:38:28
电子设计工程(2015年8期)2015-02-27 12:05:26