列车控制系统北斗卫星差分定位方案的设计与实现
2020-11-30 09:11:54王业流白昌龙肖立志
控制与信息技术 2020年5期
王业流,白昌龙,肖立志
(1. 湖南中车时代通信信号有限公司,湖南 长沙 410129;2. 中国铁路哈尔滨集团有限公司 电务部,黑龙江 哈尔滨 150006)
0 引言
铁路机车定位一般有机车位置远程监测和高精准列车运行控制定位两种典型应用场景。机车位置远程监测是通过电子地图、信息列表等形式实时查询显示机车位置,使地面系统实时掌握机车位置分布,要求能够将机车定位准确到区间、车站、机务段等范围,水平精度(方均根值)约10 m。高精准列车运行控制定位用于列车运行控制系统,对机车实施自动控制,定位精度为厘米级,要求能准确识别机车所处线路、股道、里程标,满足库内调车、站内定点停车和开车对标、区间位置校正等要求。
目前,运用于铁路列车控制的主流定位技术除传统的卫星单点定位法,还有测速定位和应答器定位方法[1-3]。测速定位是一种连续定位方式,其通过不断地测量列车的实时运行速度并计算列车的运行距离而实现定位;定位精度为每个区间内10 m,但误差会随时间累积。该方法的优点是抗电磁干扰能力强、易于实现且成本低,缺点是精度无法满足机车的精确控制需求且易受列车轮对磨损、空转及滑行等因素影响而导致误差增大。应答器定位是一种间断定位方式,其利用电磁感应技术在特定地点实现地面向机车传输信息。该方法的优点是定位精度高(<0.3 m)、抗干扰性强、可靠性好;缺点是必须结合其他定位技术才能实现连续定位,且造价高、施工困难[4]。卫星单点定位法是一种连续定位方式,其通过接收导航卫星发送的导航电文实现自主定位,定位精度为10 m,且误差不随时间累积。该方法的优点是全天候、全天时、低成本;缺点是会受信号遮挡和电磁干扰等因素影响而导致定位精度下降甚至不可用[5]。
全球已建成的四大卫星系统(北斗,GPS,GLONASS,Galileo)水平定位精度和高程精度一般约为10 m[6],虽可满足机车位置远程监测等使用要求,但要实现机车精准控制,定位精度则明显不足。若要进一步提高精度,就必须消除定位结果中的固有误差,其主要包括卫星星历误差、卫星钟差、SA干扰误差以及与传输途径有关的误差(如电离层、对流层折射误差),这就需要利用卫星差分定位技术来实现。
此外,为避免因列车运行控制系统依赖于国外的卫星系统而给铁路运输安全带来的隐患,我国自主研发的列车运行控制系统应立足于北斗卫星导航系统来实现列车可靠定位,这不仅对铁路运输安全有着至关重要的作用,而且有助于打破国外围绕GPS,GLONASS及Galileo等卫星系统实现列车高精准定位而形成的专利保护壁垒,建立并形成具有中国特色的基于卫星定位的列控系统技术标准体系。为此,本文提出一种基于北斗卫星差分定位技术、适用于列控系统的机车精确定位方案。
1 卫星差分定位技术原理
卫星差分定位技术是一种高精准定位技术,其通过将所获得的伪距修正量或位置修正量提供给用户终端设备,对测量数据进行修正,从而消除卫星系统和电磁波传输路径中的固有误差,实现厘米级偏差精度定位。实时差分技术主要分为实时动态码相位差分(realtime differential,RTD)和实时动态差分法(real - time kinematic,RTK)两种。RTD即伪距差分,其根据伪距误差解算值修正用户接收机伪距观测值的导航定位方法,定位精度一般为分米级。RTK即载波相位差分,其是一种基于载波相位观测值的实时动态定位技术,定位精度可达厘米级,用于列控系统的卫星差分技术为RTK技术。
卫星差分定位技术原理如图1所示。在已知点部署地基差分增强站,用于接收导航卫星的载波和导航电文,实时计算差分修正值并提供给附近的用户终端设备进行位置修正。当差分站和用户终端设备间距离在一定范围内且两者观测到的卫星数量满足要求时,在这些卫星向地面发送电磁波的路径上,电离层和对流层的折射系数可被视为一致,即两者具有相同的误差因子,此时差分站首先将该因子作为未知数进行方程式求解,然后再通过通信传输网络告知用户终端设备,从而使终端设备消除该误差。
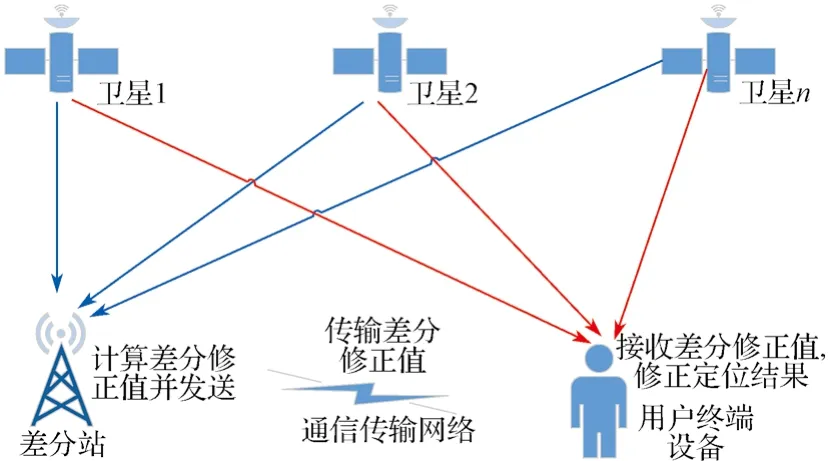
图1 卫星差分定位技术原理Fig. 1 Principle of satellite differential positioning technology
2 列车控制系统北斗卫星差分定位方案设计
列车控制北斗卫星差分定位系统(图2)由差分基准站(简称“差分站”)、数据中心和移动站(用户终端设备)3部分组成[7]。差分基准站用于长期连续跟踪观测卫星信号,求得差分修正值,再通过通信网络实时将修正值传输到数据中心。数据中心用于管理各差分站的运行,接收和处理各差分站的数据,实现数据入库和分流,根据各移动站的用户请求和当前位置进行差分站匹配和数据分发。移动站实时从北斗, GPS, GLONASS,Galileo等卫星系统获得导航电文,解算当前位置,并将位置发送给数据中心,从数据中心获得差分修正值,对位置修正,从而实现高精度定位结果。

图2 列车控制北斗卫星差分定位系统原理框图Fig. 2 Principle block diagram of the Beidou differential positioning system for train control
2.1 系统网络框架
通信网络的选择决定了差分定位系统的网络框架,一般有数传电台及移动通信网络等方式。数传电台的网络结构相对简单,信号传输半径最远可达10 km,受电台通信距离限制,至少每隔20 km需部署1个差分站,在该范围内,凡是能接收到差分站信息的车载终端均能使用并获得RTK高精度定位结果。移动通信网络是广域网,通信传输不受距离制约,按差分站有效作用半径30 km计算,可每隔60 km部署1个差分站,随着技术的进步,差分站作用范围甚至可达100 km,所需差分站数量甚至只有电台方案的1/10;但若采用移动通信网络方式,则需由专门的数据中心实现差分站与车载终端的匹配。同时,数据中心能够实现差分站和车载终端的集中管理,有利于铁路部门的运营维护。该方案的缺点是网络服务质量受到运营商网络信号覆盖的影响,若处于信号盲区或网络延时过大,则RTK定位自动降为单点定位。本文选择移动通信网络方式,图3示出基于移动通信网络的列车控制北斗卫星差分定位系统的网络框架。
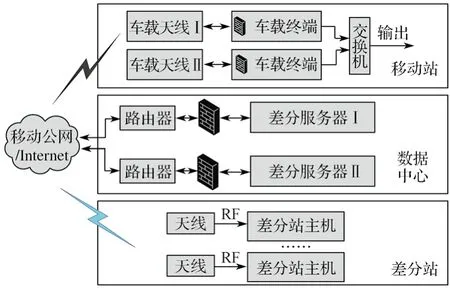
图3 列车控制北斗卫星差分定位系统网络框架Fig. 3 Network framework of the Beidou differential positioning system for train control
2.2 系统设计要点
应用于列车控制系统的北斗卫星差分定位系统必须满足高可靠性和高可用性要求,若系统输出的位置数据错误或不可用,将引发严重行车事故。有别于常规的卫星差分系统,本系统设计要点如下:
(1)差分站有效作用范围和可靠性。差分站分布在铁路沿线的不同区域,其有效作用范围一般在半径30 km内,该范围可经过优化设计扩大到50~80 km。为避免单站因长时间不间断工作而发生故障,或区域内发生电磁干扰或区域停电,差分站在部署时,采用多站冗余交叠覆盖。当某个差分站故障或差分数据异常时,可采用邻近的基准站数据。
(2)差分站与数据中心之间通信协议。差分站主机通过移动网络VPN通道与数据中心的差分服务器通信,以避免网络黑客攻击差分站。双方采用Ntrip(networked transport of RTCM via internet protocol)协议(RTCM3.2)进行通信交互。Ntrip即通过互联网进行RTCM(radio technical commission for maritime services)网络传输的协议。RTCM为国际海运事业无线电技术委员会,是全球导航卫星系统(global navigation satellite system,GNSS)方面的国际标准化组织。
(3)通信安全性。数据中心承担差分数据接收、转发及系统运用维护等工作,其与差分站、移动终端通过移动网络通信;在该网络边界部署防火墙,采用访问控制策略仅允许正常的业务数据通过,阻断非法设备攻击。旁路部署入侵检测系统(intrusion detection system,IDS),用于检测、限制和抵御来自移动公网的网络攻击行为;同时设置安全监管审计平台、堡垒机等设备,记录网络通信行为,对运维人员的操作权限进行控制和操作行为审计,在线掌握系统整体安全威胁和风险,对危及系统网络安全的因素做出预警分析,实现标准GB/T 22239-2019 《信息安全技术 网络安全等级保护基本要求》规定的安全物理环境、安全通信网络、安全区域边界、安全计算环境和安全管理中心等5个分类的技术要求,防止非法设备攻击或渗透系统,造成数据泄露、丢失或被篡改。
(4)数据中心的可靠性和可用性。数据中心不间断运行,有发生系统崩溃、工作宕机及器件损坏等故障的可能性,这会导致中心无法正常工作。为提高数据中心的可靠性和可用性,服务器采用双套冗余架构设计[8]。各差分站同时向I系和II系服务器发送差分数据。两系差分服务器同时向车载终端提供差分数据,车载终端对两路差分数据进行筛选。
(5)车载终端与数据中心之间通信协议。车载设备向数据中心发送差分定位请求,数据中心接收差分修正值并修正定位结果,从而实现高精度定位。车载终端与数据中心之间采用基于TCP/IP的私有定制协议进行通信交互,对RTCM3.2协议格式的内容进行封包加密传输。
(6)车载终端的可靠性和可用性。车载终端同样存在电子元器件或芯片失效、内置软件系统崩溃、长时间连续工作引起的软件不稳定等问题,因此终端采用I系和II系双套冗余,两系均与差分服务器建立通信。每系内置的无线通信模块接入不同运营商的网络,以规避信号盲区或弱信号区域的影响。
3 实施方案
3.1 需求分析及规划
列车控制北斗卫星差分定位系统在实施前,应根据系统需求确定差分站数量及规模。例如,某卫星差分定位系统用于辅助车载GNSS终端实现精确定位,在卫星信号质量良好的区域,RTK定位精度达到10 cm(方均根值),要求系统配属的差分站能覆盖4个车站,并且每个差分站覆盖半径可达30 km。基于该需求,可将差分基准站部署在上述4个车站附近,并在车站1、车站2附近各增加1个冗余站点,车站3和车站4距离为45 km,通过优化车载终端实现差分站有效作用范围达到50 km以上,因此车站3和车站4两处的差分站可互为冗余,实现信号重叠覆盖,无须额外增加冗余站点。具体部署方案如图4所示,其中黑色为主差分站,红色为冗余差分站。
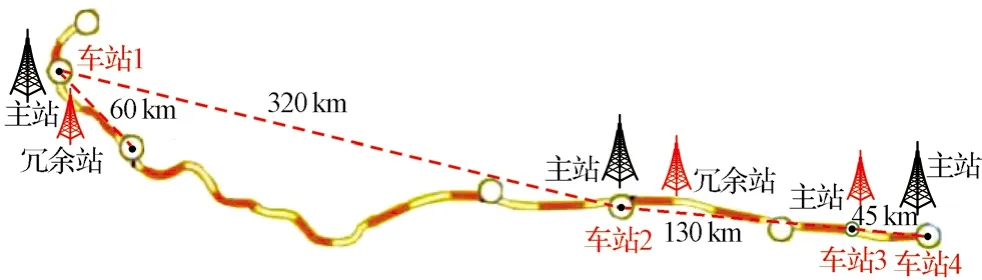
图4 差分站部署规划Fig. 4 Deployment planning of differential stations
数据中心采用移动网络与差分站和车载终端通信,因此其部署位置不受限制,主要考虑维护管理的便利性问题。
3.2 差分站选址
差分站天线部署于楼顶的开阔地带,选址时遵循以下原则[9]:站址高度角10°以上没有任何遮挡物;与容易产生多径效应的地面物体(树木、水体、海滩和易积水地带、金属物体)的距离大于200 m;与电磁干扰区(如微波站、无线电发射塔、高压线穿越地带等)的距离大于200 m。
粗略选定位置后,采用差分设备连续观测24 h,主要指标应满足要求:可用卫星数量不少于25颗;多路径效应值MP1≤0.5,MP2≤0.65,MP3≤0.5;数据完好性不低于95%;周跳比不小于400。
3.3 设备安装和调试
差分站天线(图5)宜安装在建筑物楼顶且至少高出底座1.70 m,以避免人体遮挡。采用方形混凝土底座及直径25~30 cm的PVC管灌注混凝土,用于支撑天线,以确保天线不发生细微的晃动而影响定位精度。差分站接收机、差分服务器及相关网络设备部署在机房内,机房环境满足标准GB 50174-2017《数据中心设计规范》要求。
差分站安装完成后,首先需对差分站扼流圈天线安装位置的经纬度坐标进行精准测量,然后再对设备进行初始化配置和调试,主要包括以下信息:基站坐标、以太网IP、差分站ID、传输数据内容及传输网络等。

图5 差分站天线实物图Fig. 5 Actual antenna of differential station
4 关键技术难点及优化策略
卫星差分定位技术在铁路环境的应用,除采取差分站交叠冗余覆盖、数据中心冗余、网络信息安全设计及车载终端冗余设计等方法提高可靠性和可用性设计外,在提高其环境适应性方面还有其相应的特点和关键技术难点需解决:(1)在保障定位精度的同时,如何扩大差分站作用范围,以减少差分站部署数量,降低投资成本;(2)铁路沿线存在移动通信网络的信号盲区,网络延时较大,甚至短时中断,如何降低网络通信的影响;(3)在隧道、山区、桥梁等铁路环境中,卫星信号接收质量受到影响,如何提高车载设备对卫星信号的重捕获能力并快速进入RTK状态。
4.1 扩大差分站的有效作用范围
差分站RTK定位的有效作用半径一般为30 km,在此范围内,定位精度误差与距离呈线性关系,即误差=±(10+10-6×D)mm(D为差分站与终端的距离,单位为km)。随着参考站和移动站间距离的增加,一旦超出有效作用范围,定位误差与基线长度间将逐渐失去线性关系,即便经过差分处理,用户数据仍然存在很大的观测误差,导致定位精度逐渐降低,严重时甚至无法解算出载波相位的整周模糊度。
为了确保更远距离仍能获得高精度定位结果,无论是差分站还是移动站都需捕获到更多的卫星信号,保障两者观测到的共同卫星的数量足以获得差分解算。提高卫星捕获能力的措施和策略主要有:(1) 采用以北斗系统为主, GPS, GLONASS和Galileo为补充,支持11频(B1/B2/B3, L1/L2/L5, G1/G2和E1/E5a/E5b)的GNSS接收器;(2)采用支持低仰角信号接收的天线,以尽可能提高信号捕捉能力。
图6示出某终端优化前的试验数据,其横坐标为采集点编号;左侧纵坐标为定位状态代号(5为浮点解,4为RTK固定解,3为未定义值,2为伪距差分RTD,1为单点解),右侧纵坐标为终端距差分站的直线距离。试验结果表明,终端在30 km内可维持在高精度的RTK固定解,且随着距离增加,逐步保持在差分浮点解状态。
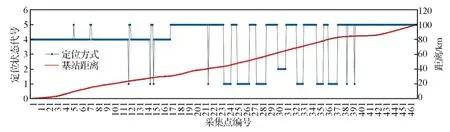
图6 优化前的RTK作用范围Fig. 6 RTK action range of the terminal before optimization
图7所示为优化后数据。在100 km范围内,终端基本保持在RTK固定解。与优化前相比,车载终端增加Galileo卫星 E1频点信号的接收,GNSS天线增益由4 dBic提升到6 dBic,特别是低仰角信号,20°仰角方向接收增益可达-4.5 dBic。

图7 优化后的RTK作用范围Fig. 7 Optimized RTK action range
图8所示为终端距基站100 km范围内在RTK固定解状态下的定位偏差,其右侧纵坐标为终端与差分站的直线距离。试验数据显示,定位偏差平均值约5.1 cm,最大偏差27.1 cm,发生在距离基站79 km处。可见,优化后的终端设备的定位偏差随着与基站距离变化有较大的波动,但仍满足机车精准控制的需要。
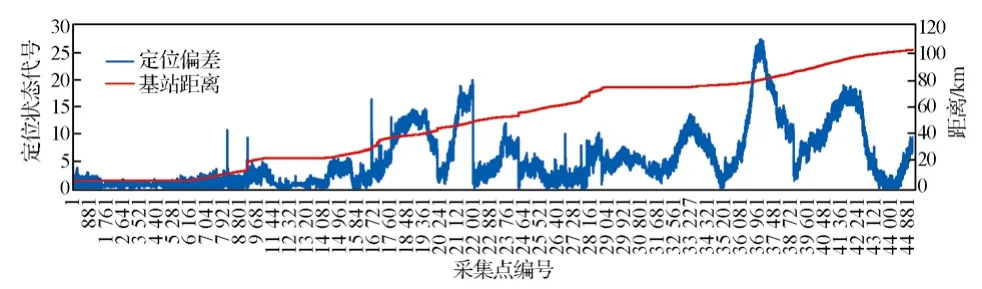
图8 100 km范围内的定位偏差Fig. 8 Positioning deviation within 100 km
4.2 降低网络延时对差分稳定性的影响
差分修正值是提高差分定位精度的必要信息,且具有一定的时效性。当网络中断后,若车载终端继续使用最后一条差分修正值数据,随着车载设备远离差分站,引入的定位误差将持续增大;并且即使网络恢复连接,再次定位也较为困难,因此车载终端一般设置有差分延时阈值。若延时超过阈值,则车载终端退出差分固定解,进入差分浮点解状态,而浮点解精度一般在厘米级与米级范围内波动,定位数据不可用于列控系统对机车的精准控制。
降低网络通信延时(或中断)对机车精确定位的影响,需要在定位精度和数据可用性之间取得平衡。差分定位技术最初主要应用于测绘行业,对测量精度要求较高,差分延时阈值一般设置为30 s。该技术在列控系统中使用并在机车上进行了大量试验,积累的试验数据证明,可将该值放宽至60 s。图9示出某终端优化前后的效果,其中差分延迟1代表通信正常的终端,差分延迟2为通信中断的终端。可以看出,终端在优化前,差分延时阈值为30 s;优化后为60 s。实际测试过程中,人为断开该终端与差分服务器之间的数据通信,在60 s范围内,终端继续采用断线前接收到的差分数据进行RTK解算。采用通信正常的终端作为参考对象。通信中断前,两者平均定位偏差约为3.21 cm,最大偏差约为4.68 cm;通信中断后60 s内,两者平均偏差3.35 cm,最大偏差为4.88 cm;前后偏差0.2 cm。测试结果表明,优化后的终端能够容忍60 s的通信中断仍保持精确定位,差分阈值的合理设定对于该系统适应于铁路沿线移动公网信号质量差的环境使用具有重要的指导意义。
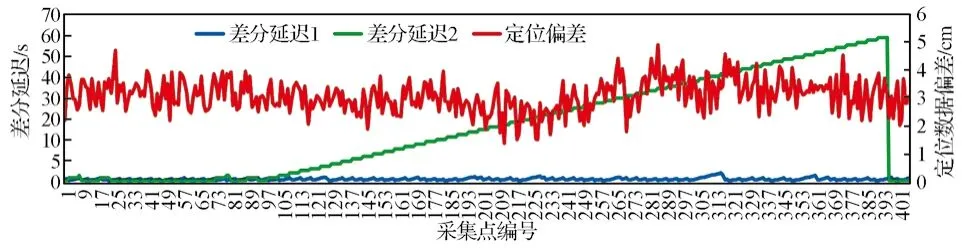
图9 差分延时与定位偏差Fig. 9 Differential delay and positioning deviation
4.3 提高卫星失锁后重捕获及快速进入RTK
铁路沿线地形环境复杂,接收机与卫星失锁后,对外输出无效定位信息;待重捕获卫星信号、完成RTK初始化后,才能再次输出RTK精确定位信息。如列控系统用于调车自动作业防护过程,机务段、车站等区域均有遮挡环境,在驶出遮挡环境至行驶至信号机等关键地标期间,若不能获得RTK固定解,则可能造成控制精度不足,严重时会引发安全事故。
若要缩短RTK初始化时间,需提高RTK接收机的灵敏度和搜星能力。在高精度卫星导航领域,随着国内外智能驾驶技术的发展,定位终端的技术发展路线由测量型向导航型发展。前者对信号严格筛选,灵敏度低,追求高精度;后者适当放宽对接收信号质量的要求,灵敏度高,追求高可用性,适当保障定位精度。因此铁路差分定位系统宜选用高灵敏度的模组,以改善重捕获速度;并辅以合理的定位算法,对捕获的卫星信号进行筛选,提高收敛速度。
图10示出不同灵敏度模组的定位状态对比,其横坐标为采集点编号,左侧纵坐标为模组1(高灵敏度)在铁路机车高速运行过程中的定位状态,右侧坐标为模组2(低灵敏度)的定位状态。在地点1,经过一个长隧道后,模组1比模组2提前43 s进入RTK固定解;在地点2,卫星信号处于半遮挡状态,模组2无法维持RTK固定解,进入单点定位状态,时间长达89 s;在地点3,卫星信号质量差,模组1经历35 s的波动进入稳定RTK固定解,而模组2经过116 s的波动后进入RTK固定解。可以看出,在弱信号环境下,高灵敏度模组稳定性更高;在信号受遮挡的环境中,高灵敏度模组具有更高的响应速度,可更快恢复RTK固定解。
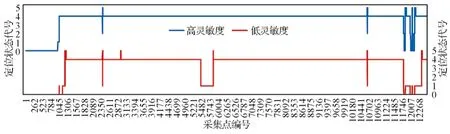
图10 不同灵敏度定位模组的定位状态对比Fig. 10 Comparison of positioning status of modules with different sensitivity
5 应用
本文提出的列车控制系统北斗卫星差分定位方案已在LKJ-15列车控制系统中得到深入应用。由北斗卫星差分定位系统向LKJ-15列车控制系统实时输出2组冗余的精密定位数据,每组数据中包含了多星座混合定位数据、北斗单系统数据及GPS单系统数据。LKJ-15列车控制系统对多组冗余数据进行表决和仲裁,从而避免单终端或单卫星星座偶发的错误数据,确保数据的高可靠性。借助本系统提供的精密可信数据,满足LKJ-15列车控制系统对智能行车控制的需求。
2018年3月,采用北斗卫星差分定位技术和车载地图数据库的LKJ-15列车控制系统在南昌铁路局武夷山站进行运用试验,实现了站内精准定位(厘米级精度)和调车自动防护,不仅可对站界、车挡、接触网终点等关键位置进行防护,还可进行调车信号机安全防护和区间作业安全防护。
2018年8月,采用北斗卫星差分定位技术和车载地图数据库的LKJ-15C列车控制系统在朔黄铁路装车应用,实现了重载列车站内自动开车对标功能,其定位精度约5 cm,控制精度约50 cm,由于人工对标被取代,因此司乘人员的操纵难度被大幅降低。
2019年10月,采用该北斗卫星差分定位方案的LKJ-15列车控制系统被应用于国家能源集团神朔铁路智能驾驶系统,为列车自动唤醒、自动运行、自动停车、自动调车及自动休眠等列车控制全过程提供了精确的列车位置,使万吨重载列车实现了运营全过程的自动驾驶及机车作业的自动化,提升了运输效率并保障了列车运输安全[10]。
6 结语
本文设计了一种适用于铁路环境的北斗卫星差分定位系统,其服务于列车运行控制系统。文中详细阐述了系统设计方案及设计要点,描述了系统具体实施方案;针对系统关键技术难点进行阐述,并给出了相应的优化策略,通过相应的试验进行了对比验证。
对列车控制系统北斗卫星差分定位技术的研究,不仅需充分发挥其精度高、成本低、应用便捷等优点,同时也必须充分考虑到其受信号遮挡、电磁干扰及网络通信质量等方面的影响。下一步将从以下几个方面开展深入研究:(1) 将惯性导航系统和超宽带等定位技术作为北斗差分定位技术的补充,解决弱信号环境或信号完全遮挡环境下的可靠精确定位问题;(2)研究天线抗干扰技术,加大射频载波信号和干扰信号之间的隔离度,提高射频抗干扰性;(3)将北斗差分定位技术与 5G 技术相结合,进一步提高网络通信链路的通信质量,降低数据传输延时。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
铁道通信信号(2020年8期)2020-02-06 09:13:18
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
中国公共安全(2017年11期)2017-02-06 05:28:09
电源技术(2015年2期)2015-08-22 11:28:14
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
四川生理科学杂志(2014年2期)2014-02-28 14:09:20