基于Arduino的向心力实验仪
2020-11-30 09:16:26岳国联
物理实验 2020年11期
岳国联
(六盘水市第三中学,贵州 六盘水 553001)
向心力的大小与物体质量m、轨道半径r、角速度ω的定量关系为F=mrω2. 在教学中,该关系式通过2种方式得到:理论分析,通过运动分析得到向心加速度,再由牛顿第二定律得到向心力的表达式;实验探究,通过实验进行定量研究,然后总结得到向心力的表达式[1]. 实际教学中由于向心力实验仪功能受限,实验效果不佳[2-5],为此设计制作了向心力实验仪.
1 硬件设计
基于Arduino和传感器设计向心力实验仪. 实验仪的硬件结构设计如图1所示,实物图如图2所示. 向心力实验仪由转动模块和固定模块2部分组成:

图2 向心力实验仪实物图
1)转动模块位于转盘上随转盘一起转动,主要功能是控制小球做圆周运动的轨道半径,采集及发送轨道半径、向心力和角速度数据;
2)固定模块位于实验仪的底座,主要功能是控制小球做圆周运动的轨道平面和角度速度,采集小球的质量数据,接收转动模块传入的数据并且整理,然后动态地显示数据并且上传至上位机.
采用滚珠丝杠式直线模组控制和测量轨道半径,半径测量精度为0.01 mm;采用小球套环可以将滑动摩擦变为滚动摩擦,向心力测量精度为0.01 N;小球质量测量精度为1 g,角速度精度为0.001 rad/s.
转动模块核心部件Arduino B与固定模块核心部件Arduino A之间通过蓝牙传递信息. 其原理图分别如图3和图4所示.

1.拉力压力传感器 2.小球 3.小球罩 4.小球套环 5.直线模组套件 6.光电传感器 7.Arduino B、蓝牙B、直线模组电机驱动、移动电源、A/D转换等 8.法兰盘 9.电机 10.可调倾角底座 11.显示屏 12.电机转速控制器 13.电机电源 14.压力传感器(电子天平) 15.Arduino A、蓝牙A、电机驱动、移动电源、A/D转换等图1 硬件结构设计
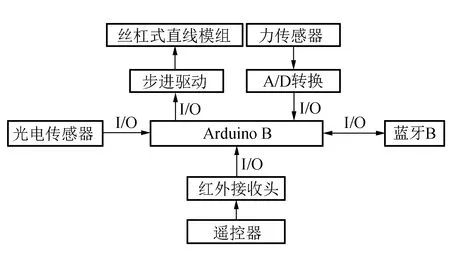
图3 转动模块原理图
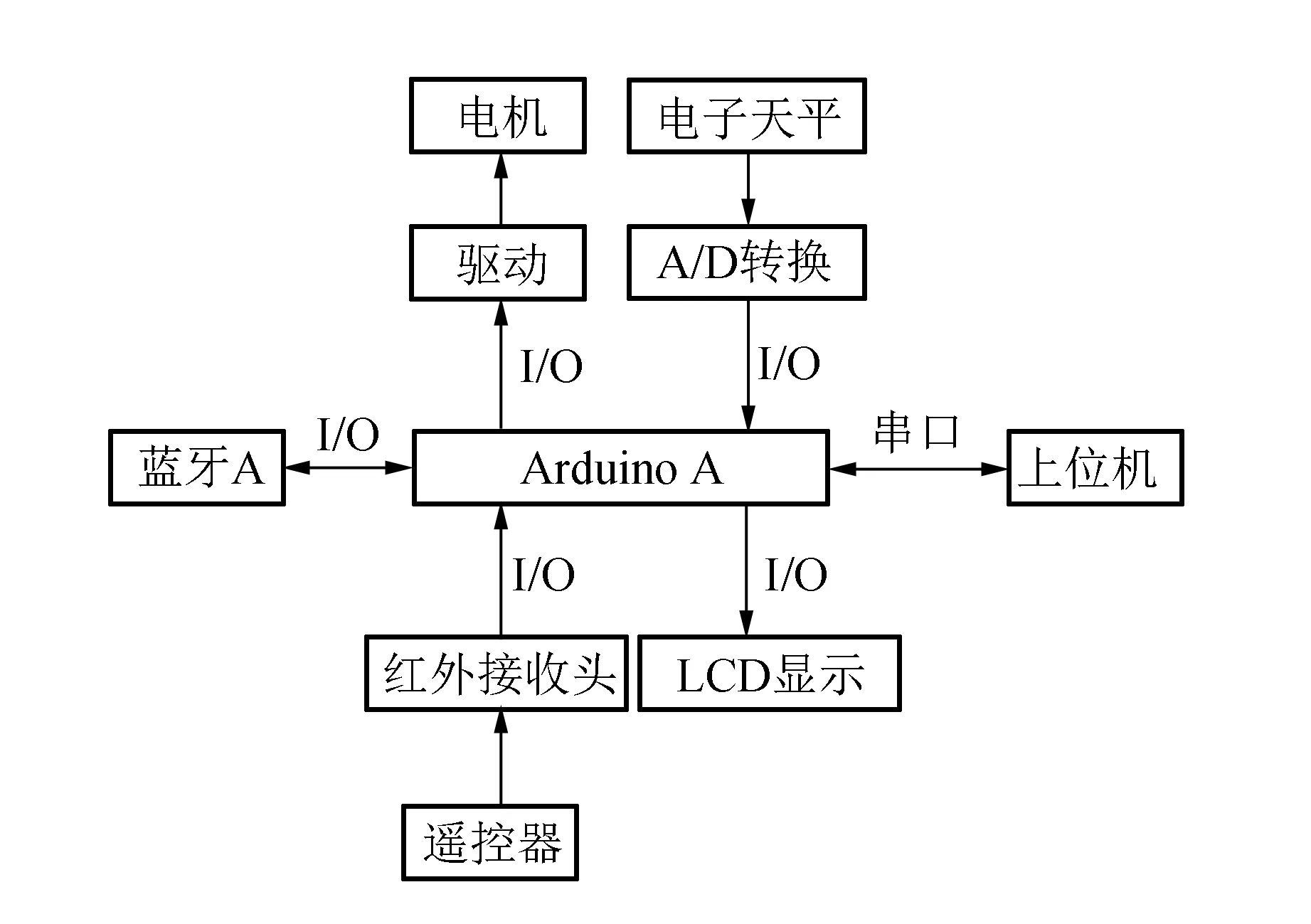
图4 固定模块原理图
2 软件设计
下位机主要是通过Arduino A板和Arduino B板相互配合,控制小球做圆周运动的参量并采集实验数据.
上位机在Excel基础上通过VBA编程设计而成,主要作用是显示和处理数据. 主界面实时动态显示数据,如图5所示.
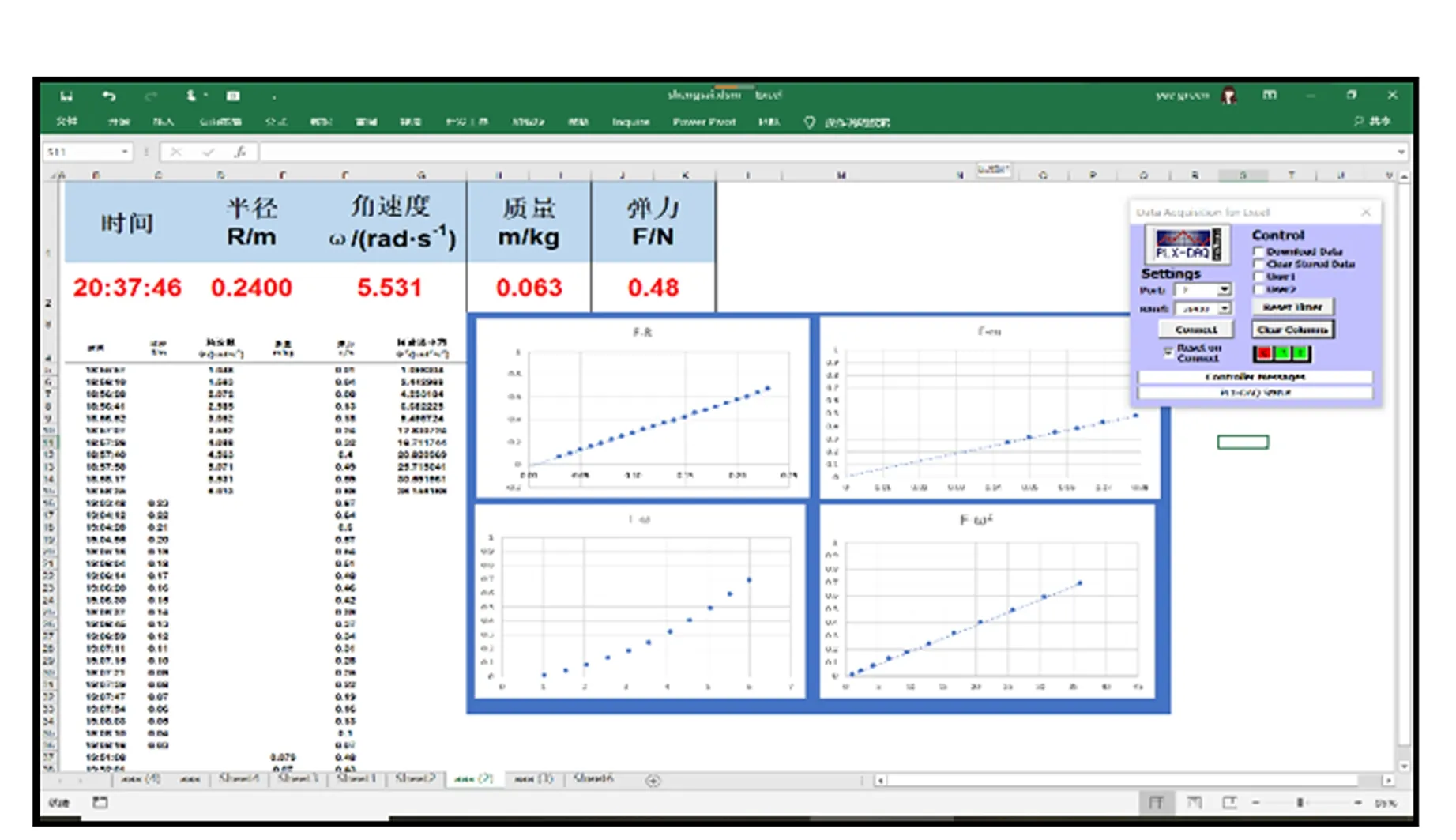
图5 上位机(Excel)数据处理界面
3 性能测试
该实验仪以研究水平面内匀速圆周运动为主,也可以拓展到研究斜面或竖直平面内匀速圆周运动.
3.1 控制质量m及轨道半径r不变,探究向心力F与角速度ω的关系
实验仪采集数据如表1所示,Excel拟合数据如图6所示.

表1 不同角速度的向心力
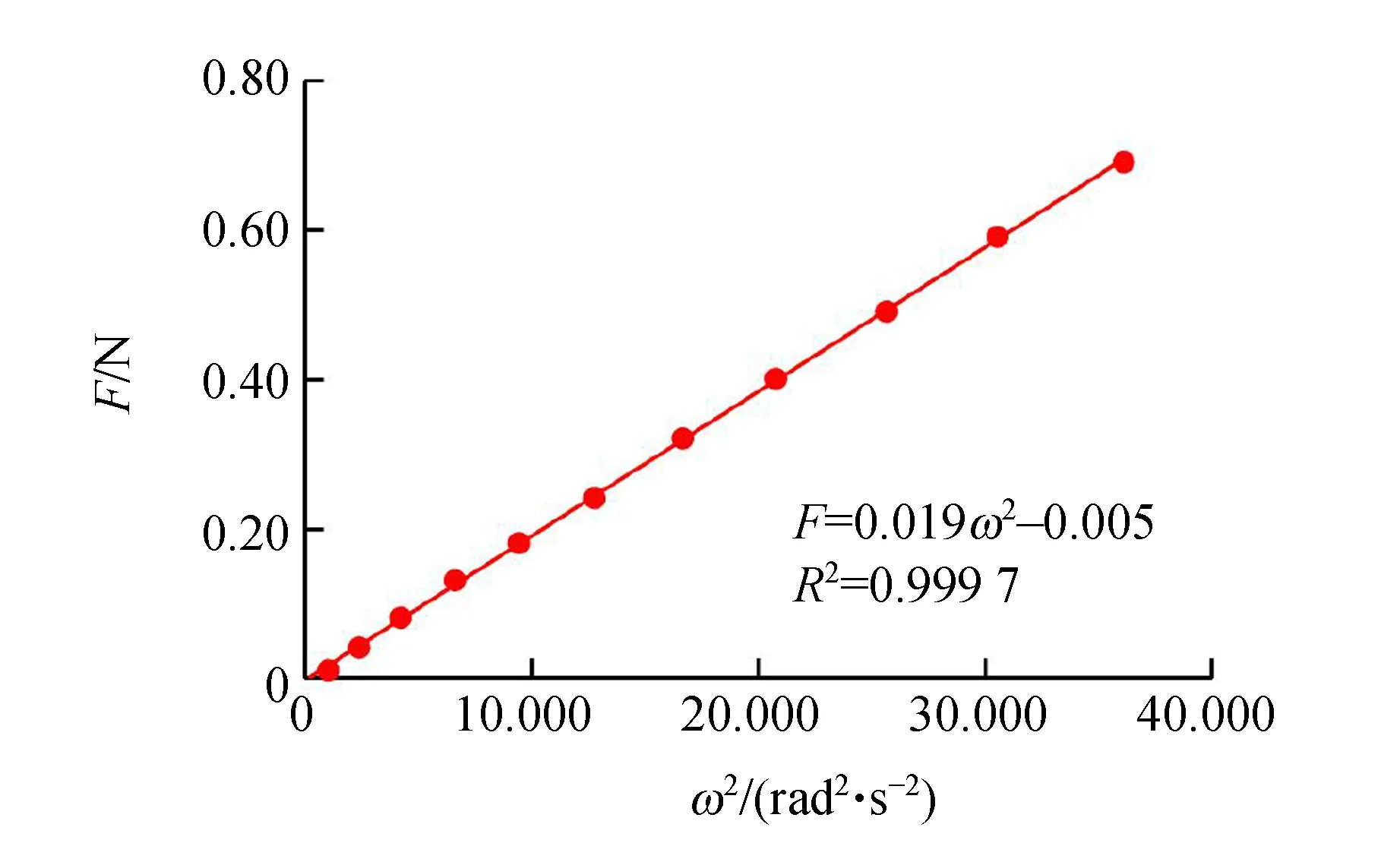
图6 向心力F与角速度的平方ω2的关系拟合
3.2 控制质量m及角速度ω不变,探究向心力F与轨道半径r的关系
实验仪采集数据如表2所示,Excel拟合数据如图7所示.
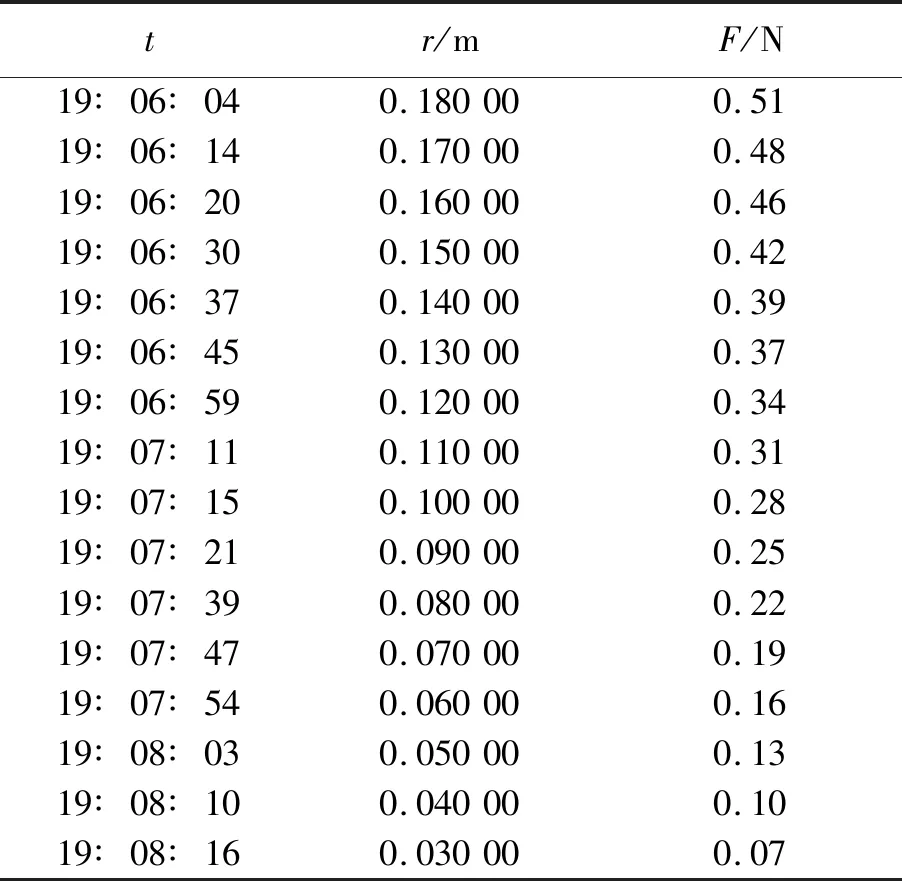
表2 不同轨道半径的向心力
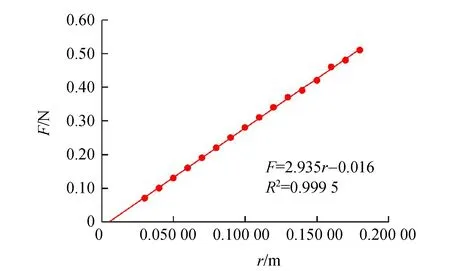
图7 向心力F与轨道半径r的关系拟合
3.3 控制轨道半径r及角速度ω不变,探究向心力F与质量m的关系
实验仪采集数据如表3所示,Excel拟合数据如图8所示.

表3 不同质量的向心力
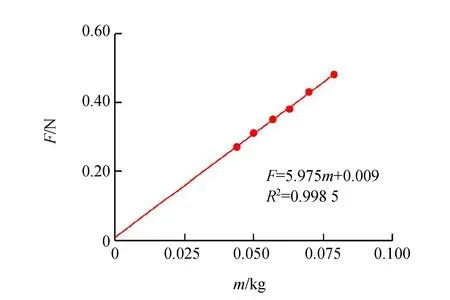
图8 向心力F与质量m的关系拟合
3.4 研究竖直平面内杆球问题
该实验仪可以研究竖直平面及任意斜面的匀速圆周运动. 研究轻杆连接小球在竖直平面做匀速圆周运动中,小球在最高点受支持力F与其速度v的关系. 需要将底座调节90°,如图9所示. 实验仪采集数据如表4所示,Excel拟合数据如图10所示.

图9 研究竖直平面圆周运动时底座调到90°位置
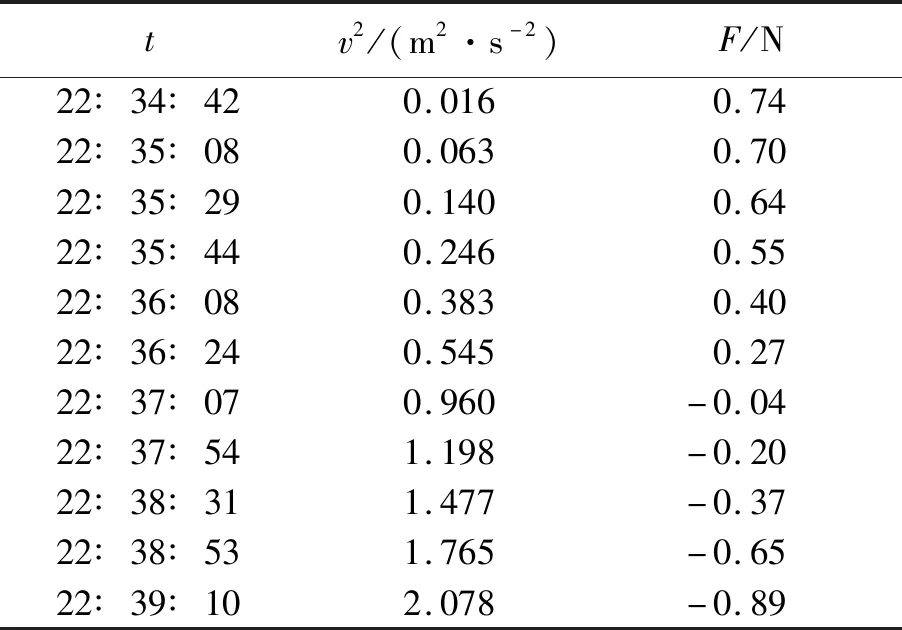
表4 最高点不同速度平方v2与支持力F
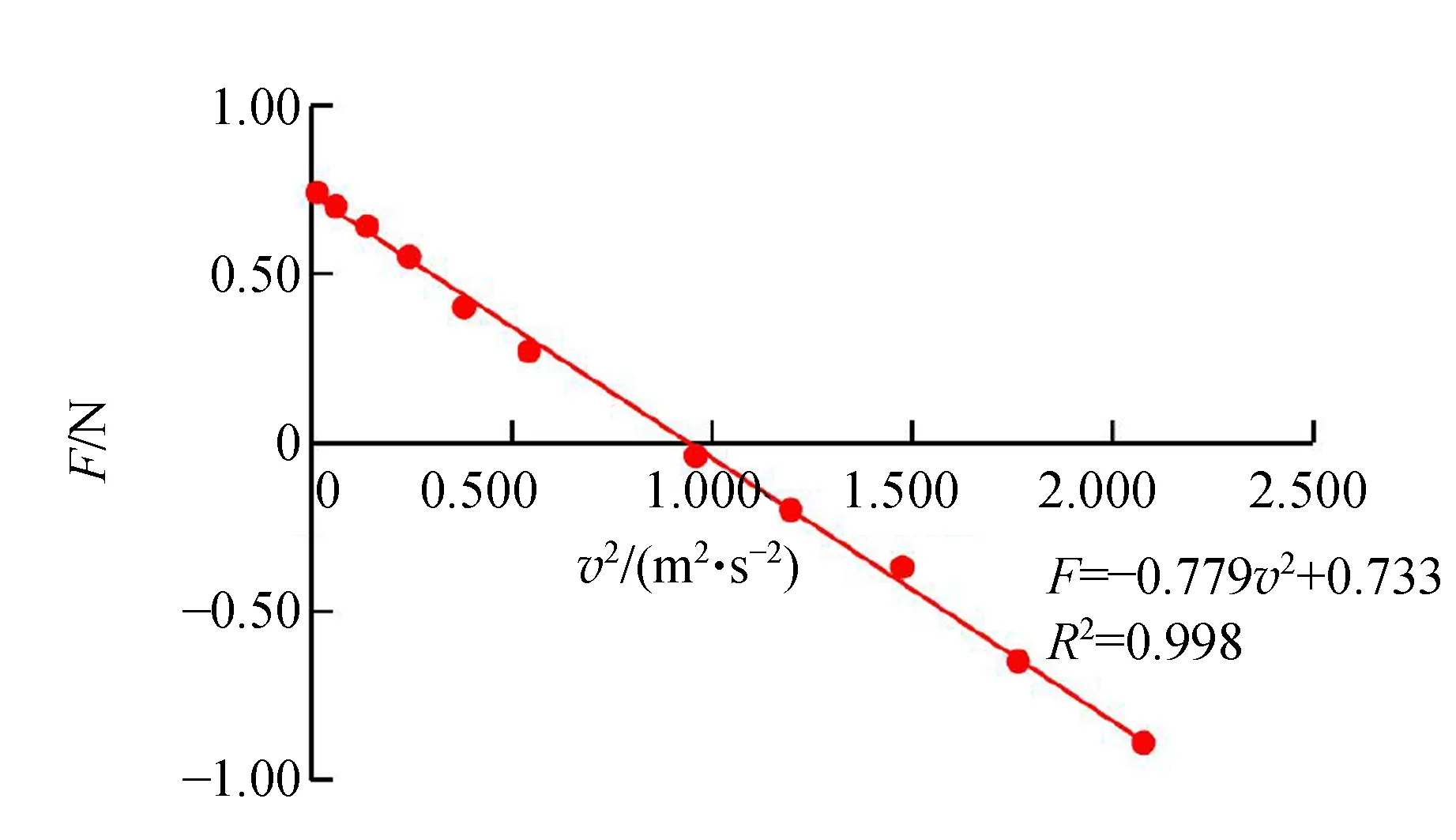
图10 最高点受支持力F与速度平方v2关系拟合
4 结束语
实验测试结果与理论吻合非常好,该仪器可以用于实验教学. 光电门身兼角速度(周期)测量和定位功能,可以指定任何点进行测量,例如定点测量凹凸桥中的最高点或最低点. 配合可调倾角底座, 可以研究任意平面内的匀速圆周运动上任意一点向心力问题. 实验过程兼顾直观和快捷,例如如探究向心力与轨道半径r之间关系时,需保持角速度ω和小球质量m不变,一般实验仪器为每测1组数据,需停下改变r后再启动. 而本仪器可以保持转动情形下直接用遥控器改变轨道半径和测量数据,更加直观而且快捷.
猜你喜欢
华人时刊(2023年15期)2023-09-27 09:05:24
房地产导刊(2021年12期)2021-12-31 05:15:40
科技创新导报(2017年30期)2018-02-03 09:20:47
科技资讯(2018年21期)2018-01-26 10:25:30
中学生数理化·高一版(2017年3期)2017-07-08 18:46:05
物理实验(2017年2期)2017-03-21 07:19:31
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
新高考·高一物理(2014年1期)2014-09-18 18:58:55
新高考·高一物理(2014年1期)2014-09-18 02:51:55