星载运动附件扰动抑制方法研究
2020-11-30 07:24:20陆栋宁郭超勇王淑一陈超
中国空间科学技术 2020年5期
陆栋宁,郭超勇,王淑一,2,陈超
1. 北京控制工程研究所,北京 100094 2. 空间智能控制技术重点实验室,北京 100094
当代航天器安装了多种不同类型的运动附件以满足整星功能设计要求。例如,为了确保在轨飞行时的能源供应,大多数卫星都安装了对日定向太阳翼,并由太阳翼驱动机构(solar array drive assembly,SADA)驱动翼板以一定的角速度相对本体连续旋转,以消除轨道和姿态运动对翼板受晒角度的影响,使太阳能输出功率最大化;为满足遥感卫星向地面控制中心下传图像数据的需求,卫星安装数据传输天线及其驱动机构(antenna drive assembly,ADA),使天线能够快速捕获并跟踪地面站,以实现图像数据的大规模快速下载[1]。然而,太阳翼、数传天线等运动附件不可避免地会对整星姿态产生扰动,其影响覆盖零到几百赫兹的频带范围,其中高频抖动使得遥感图像模糊,低频抖动使得遥感图像扭曲[2]。高、低频两类姿态扰动极大制约了高精度遥感任务的实施,是卫星系统实现高稳定度姿态控制最大瓶颈问题之一。
对于附件驱动不平稳引起的星体高频抖动问题,由于这类扰动频率一般较高,已超出卫星姿控系统的能力范围(≫0.01~0.5 Hz),因此主要通过改善部件驱动性能加以抑制。例如,法国SPOT卫星针对翼板驱动引入微步驱动策略[3],日本ALOS卫星采用一种驱动随机化策略降低特定频率上的扰动能量[4](美国SDO卫星也有类似的方法[5]),中国翼板驱动机构通过引入补偿电流抑制步进电机的四阶谐波力矩[6]等。上述方法均是针对步进电机开环控制固有的步进振荡问题提出的解决方案,并已进行在轨测试,部分技术(特别是微步驱动)得到了广泛应用。为了彻底克服开环驱动的不平稳性问题,中国航天技术研究人员近年来开展了基于闭环控制的空间驱动装置研制工作。如文献[7]提出了“PID + 挠性抑制滤波 + 摩擦力矩前馈补偿”的直流电机闭环控制方案,文献[8]基于永磁同步电机提出了一种微步驱动控制策略,文献[9]结合模糊控制与网络校正提出了一种降低闭环系统超调和导电环非线性摩擦的控制方法,文献[10]则针对翼板闭环驱动下的机电耦合系统开展了动力学建模与地面物理验证。在上述研究成果基础上,中国高分七号卫星(GF-7)等遥感卫星实现了闭环高稳定度翼板驱动机构(高稳SADA)的在轨应用[11],获得了良好的效果,基本解决了附件驱动不平稳性问题。
然而,对于附件的低频长周期姿态扰动,仅从部件驱动的角度难以解决问题,一般需要通过与姿控系统的协同控制才能有效抑制。例如,日本ETS-VII试验卫星在机械臂抓捕目标的过程中,通过规划机械臂的运动轨迹,进而根据规划的运动参数获得前馈补偿力矩,从而抑制机械臂对卫星本体产生的姿态扰动[12],文献[13]将其用于天线扰动抑制。日本DRTS卫星则采用一种自适应补偿方法,通过辨识双轴天线的质量特性参数,基于前馈补偿的复合控制技术抑制天线运动的扰动影响[14]。文献[15]针对卫星旋转载荷的周期扰动问题,提出了一种干扰力矩辨识算法,基于气浮台试验验证了扰动抑制算法的有效性。文献[16]建立了含有双轴运动天线的多体系统动力学模型,利用改进的指令预处理(command preprocessor, CPP)规划技术对天线的目标捕获运动进行规划,继而基于角动量的时间差分获得天线近似扰动力矩实现扰动补偿,这一方法也已经在GF-7等型号上实现在轨应用,基本达到了设计目标,对此有专文论述,本文不再重复。
应当指出的是,文献[16]的方法是针对步进型天线驱动机构提出的方案[17],这类驱动装置限制了天线指向运动规划技术的应用,导致其一般只能采用CPP规划方法。对此,GF-7等后续型号将如高稳SADA一样引入闭环控制技术,以实现天线扰动的全频段抑制。因此,文献[16]的方法必须进一步优化,以适应闭环天线驱动技术下的扰动抑制。本文在文献[16]的协同控制框架下,针对运动目标指向控制问题提出了一种具有角速度全局光滑性的新型规划方法,建立了适用于任意星体姿态角速度条件下的多体系统动力学方程,并给出了附件扰动补偿力矩的显式精确表达式。仿真表明,上述方法可有效抑制附件运动带来的姿态扰动影响达90%以上。
1 天线指向运动平滑方法
星载数传天线对地面目标的指向过程实质上是一种针对运动目标的捕获和跟踪控制。如图 1所示,由于卫星与地面站之间始终存在相对运动,当卫星进入地面站的可见弧段时,数传天线立刻启动对地面站的捕获,捕获成功后随即进入跟踪模式。随着卫星与地面站相对距离越来越近,天线对地面站的指向运动速度也越来越快,至卫星过顶时天线运动速度最大,在俯仰方向可达0.8(°)/s。随后逐渐降低,直至飞出地面站可见弧段后,天线运动结束。天线运动与地面站的空间几何关系可参考文献[18]中的推导。根据卫星与地面站的方向矢量,由转序关系(一般为先滚动后俯仰),可进一步给出天线X轴和Y轴转角的表达式[16]。
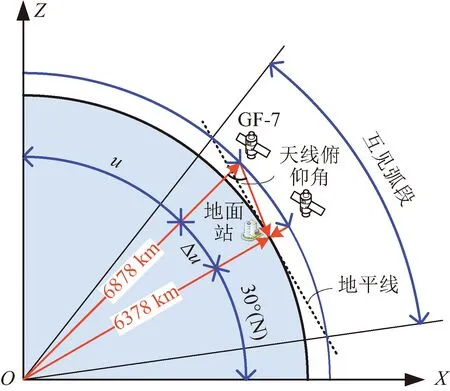
图 1 数传天线俯仰轴运动学模型Fig.1 Pitch-axis kinematics of a data transmission antenna
针对上述运动目标的捕获与跟踪问题,文献[19]提出了一种基于电机最大驱动能力的运动规划方法,即指令预处理(CPP)方法。文献[16]针对CPP方法进行了改进,使其能够根据控制误差的变化对CPP参数进行自适应调整。然而,CPP方法仅对当前控制周期内的指向误差进行规划,并以饱和力矩进行输出,具有显著的Bang-Bang控制特征,因而不能保证所规划的角速度曲线的光滑性,如图 2所示。其中,角加速度曲线在目标捕获过程中含有多个跳跃点,这些非光滑突跳点一方面使天线指向机构出现饱和力矩输出,另一方面则使天线指向角速度存在不光滑点,对整星产生很大的姿态冲击,且惯性执行机构难以实现精确的前馈补偿。
为了使天线指向角速度具有全过程的平滑性,文献[20]基于迭代技术提出了一种具有全局平滑性的指向控制方法,并将其用于末端角速度非零的单轴运动控制,本文将该方法进一步推广应用于双轴天线指向运动规划,其规划曲线及转换时刻如图3所示。
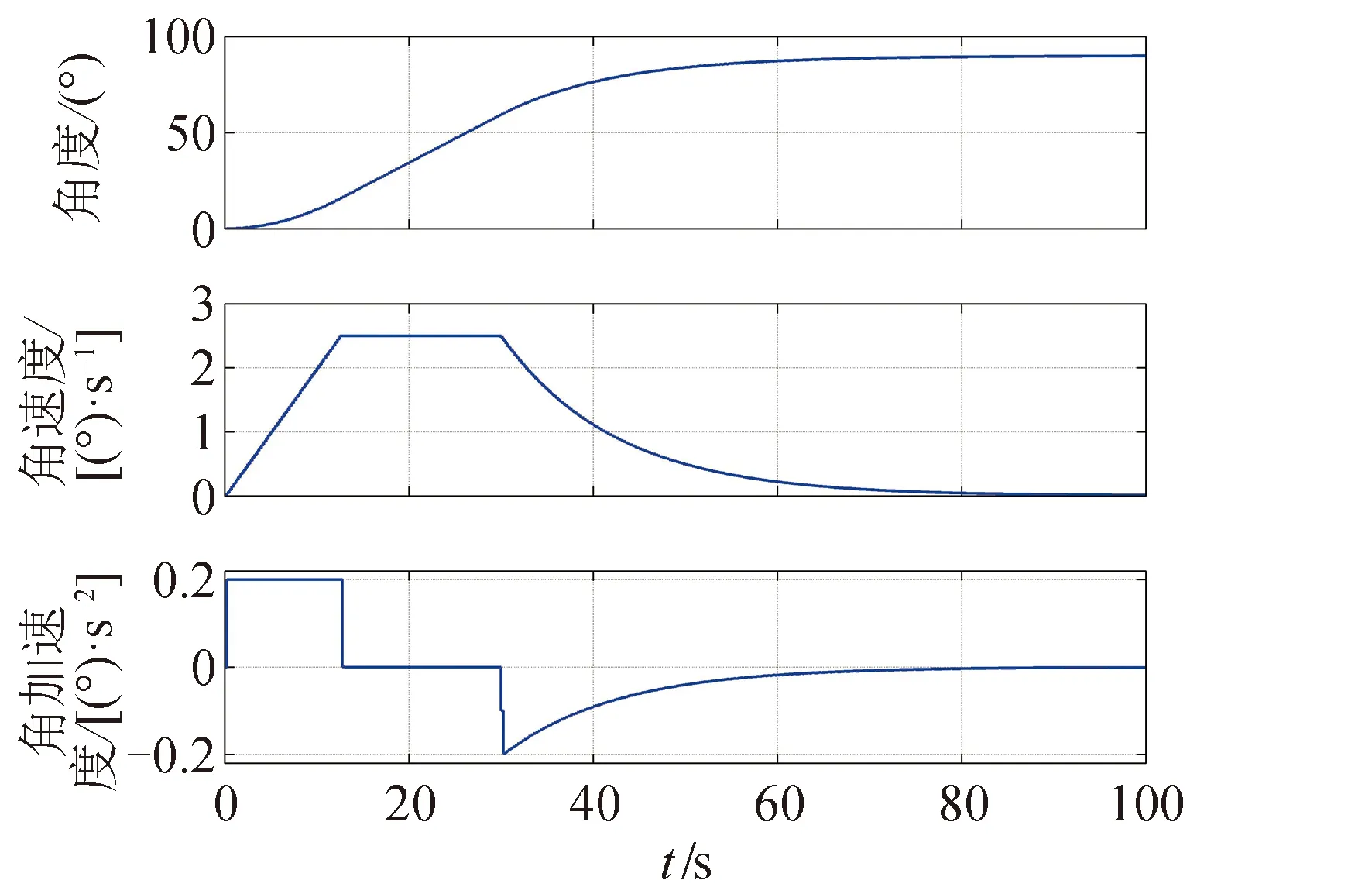
图2 指令预处理规划方法Fig.2 CPP planning method
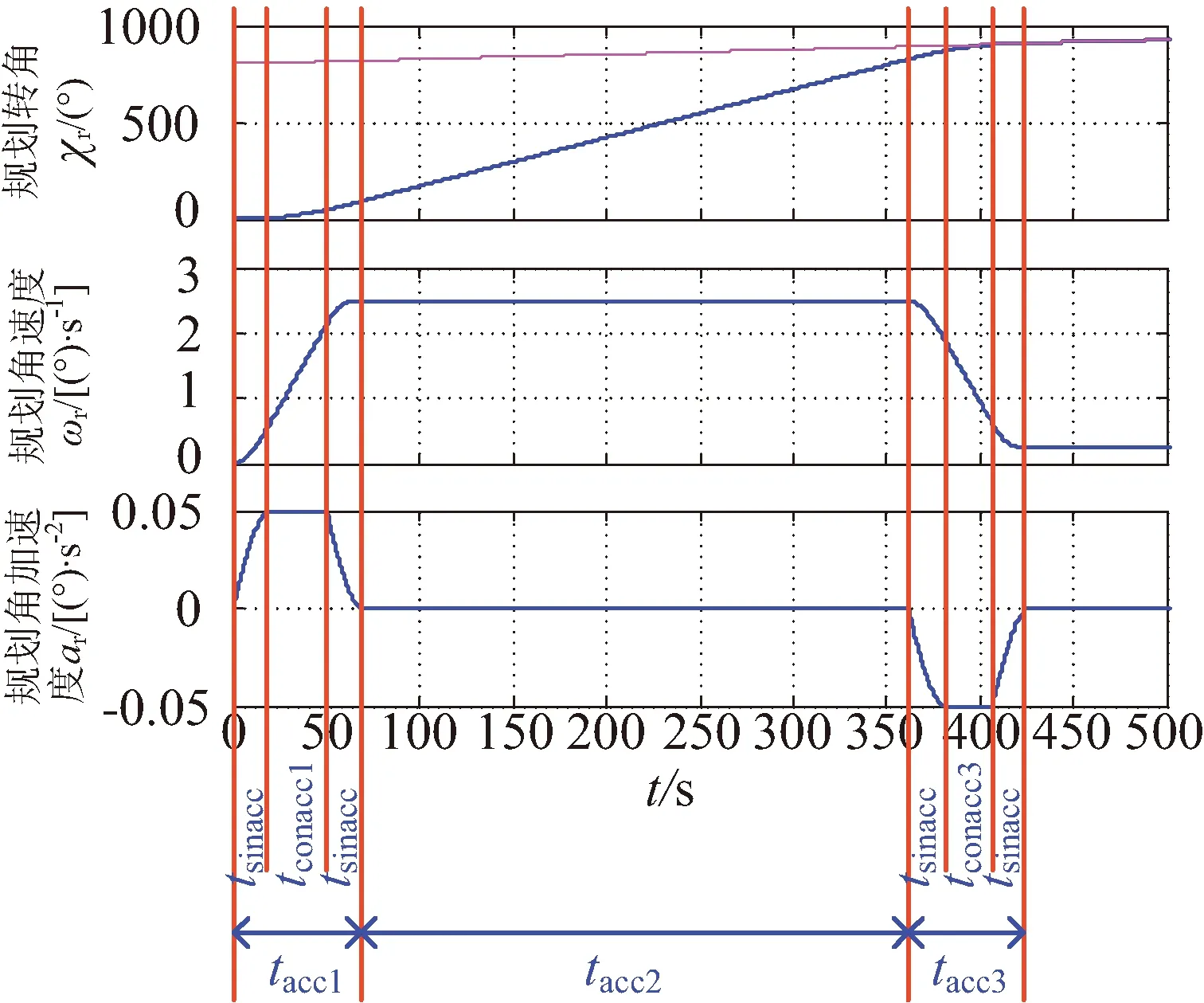
图3 轨迹规划时间点Fig.3 Key moments in the path planning
图3中,tsinacc为角加速度到达最大值的加速度时间,tconacc1和tconacc3为角速度加速阶段和角速度减速阶段的恒定加/减速时间,其表达式为
式中:amax为最大角加速度;ωmax为天线驱动机构的最大转速;ωm为对应时刻根据星地几何解算得到的天线转速;tacc2为滑行时间,是待定变量,由目标指向角与规划指向角的差决定,即:
式中:χr为末端时刻的规划转角;χm为对应时刻根据星地几何解算得到的天线应转角。由于地面站相对于卫星是运动目标,因此tacc2未知,可先取为零值,再根据差值调整tacc2,从形成迭代格式。经过几次迭代后,tacc2即可收敛到足够的精度范围内,其迭代过程如图4所示。
图4 算法流程Fig.4 Flow chart of the proposed planning method
将上述规划方法推广应用于双轴天线指向控制时,某一轴或两轴可能出现|χr| > |χm|的情形,即应转角小于规划转角,导致滑行时间tacc2< 0,迭代计算失败。解决上述问题可采取两种方法。一种方法是调整匀加速时间tconacc1或匀减速时间tconacc3,将规划转角减少到应转角。由于这两个时间调整范围有限,调整得过小会导致匀加速段和匀减速段消失,从而破坏规划后角速度的光滑性。另一种方法是通过适当缩小最大角速度和最大角加速度(根据末端时刻规划转角的表达式,规划转角为最大角速度和最大角加速度的显函数),从而整体减少末端时刻的规划转角,即:
其中:
γ=|χm/χr|
通过上述处理可使得tacc2= 0(即滑行时间为零),从而重新开始迭代计算。一般只需进行一次角速度和角加速度处理,即可完成指向运动的迭代规划。
采用上述方法进行双轴天线指向规划仿真,取tsinacc= 2 s,amax= 0.2(°)/s2,ωmax= 2.5(°)/s,在此参数配置下即使滑行时间为零,末端时刻规划转角也超过36°。仿真第1 800 s发出地面站捕获指令,此时天线两轴应转角不足20°,均小于规划转角,因此必须缩减最大角加速度和最大角速度。完成10次迭代之后,指向规划结果如图5所示。由仿真可知,迭代规划角速度、角加速度更小,因而扰动更小;但规划时间与CPP规划基本相当,因此迭代规划效率更高。
图5 迭代规划与CPP规划对比Fig.5 Comparison between the proposed iterative method and the CPP method
图6 迭代规划与CPP规划两轴角速度对比Fig.6 Comparison between angular velocities of the proposed iterative method and the CPP method
图 7 迭代规划与CPP规划两轴角加速度对比Fig.7 Comparison between angular accelerations of the proposed iterative method and the CPP method
2 含运动天线卫星多体系统动力学
本文采用经典的牛顿-欧拉法推导天线的驱动力矩及对整星姿态的扰动力矩。为节省篇幅,动力学模型示意图及坐标系定义可参见文献[16],此处不再重复。
2.1 天线的驱动力矩
设整星质心为o,天线A1部分的微元mj相对于第一铰链点o1的位置矢量为ro1j,天线A2部分的微元mi相对于第二铰链点o2的位置矢量为ro2i,相对于整星质心的位置矢量则分别为roj、roi;天线A1部分相对整星具有线速度voo1,天线A2部分相对整星具有线速度voo2,整星及天线两部分的角速度分别为ω、ω1、ω2,则天线两部分的驱动力矩T1、T2由下述方程获得。
天线A1和A2部分相对第一铰链点o1的动力学基本方程:
天线A2部分相对第二铰链点o2的动力学方程:
注意到,o1、o2相对于o点存在运动,由此增加了定点o对于动点o1、o2产生的附加力矩。因为
式中:roo1为第一铰链点o1相对整星质心o的位置矢量;ro1o2为第二铰链点o2相对o1的位置矢量。则:
第一铰链点的动力学方程:
T1=(ω×c1)×(ω×roo1)+ω×(J1·ω)+
[ω×(ω×roo1)]+ω×(J1·ω)+
m2(ω×ro1o2)×ω×(roo1+ro1o2)+
(ω×ro1o2)×(ω×c2)+(ω×c2)×ω×
(roo1+ro1o2)+ω×J2·ω+m2ro1o2×
[ω×(roo1+ro1o2)]+ro1o2×ω×
(ω×c2)+c2×ω×[ω×(roo1+
ro1o2)]+ω×J2·ω+voo1×
{ω×m1[(roo1+ro1c1)]}+voo1×
{ω×m2[(roo1+ro1o2+ro2c2)]}+
第二铰链点的动力学方程:
T2=(ω×c2)×[ω×(roo1+ro1o2)]+


ω×(J2·ω)+voo2×m2[ω×(roo1+
式中:m1、m2分别为天线两部分的质量;c1、c2分别为天线两部分的一阶质量矩;J1、J2分别为天线两部分的二阶质量矩(惯性张量)。
采用Matlab语言编写上述方程,卫星初始姿态角速度为[0, 63, 0]T(°)/s,首先由刚体卫星姿态动力学模型解算出三轴姿态角速度和角加速度变化情况,然后根据本节推导的多刚体动力学模型计算天线铰链点的力矩(不考虑天线运动),最后和Adams的仿真结果进行对比,以检验本模型的正确性。仿真时长100 s,仿真结果(见图8~图10)表明,本小节建立的天线铰链点力矩模型与Adams模型输出结果基本一致,互相印证了计算模型的正确性。
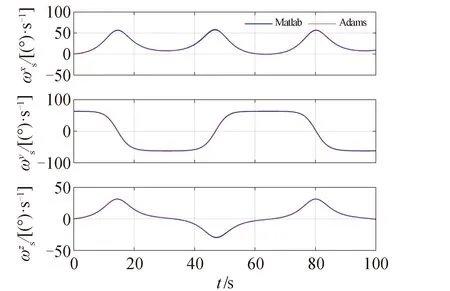
图8 卫星三轴姿态角速度Fig.8 Three-axis angular velocities of the satellite
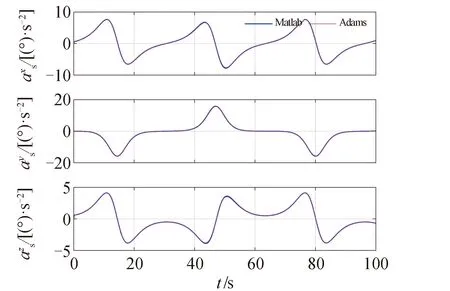
图9 卫星三轴姿态角加速度Fig.9 Three-axis angular accelerations of the satellite
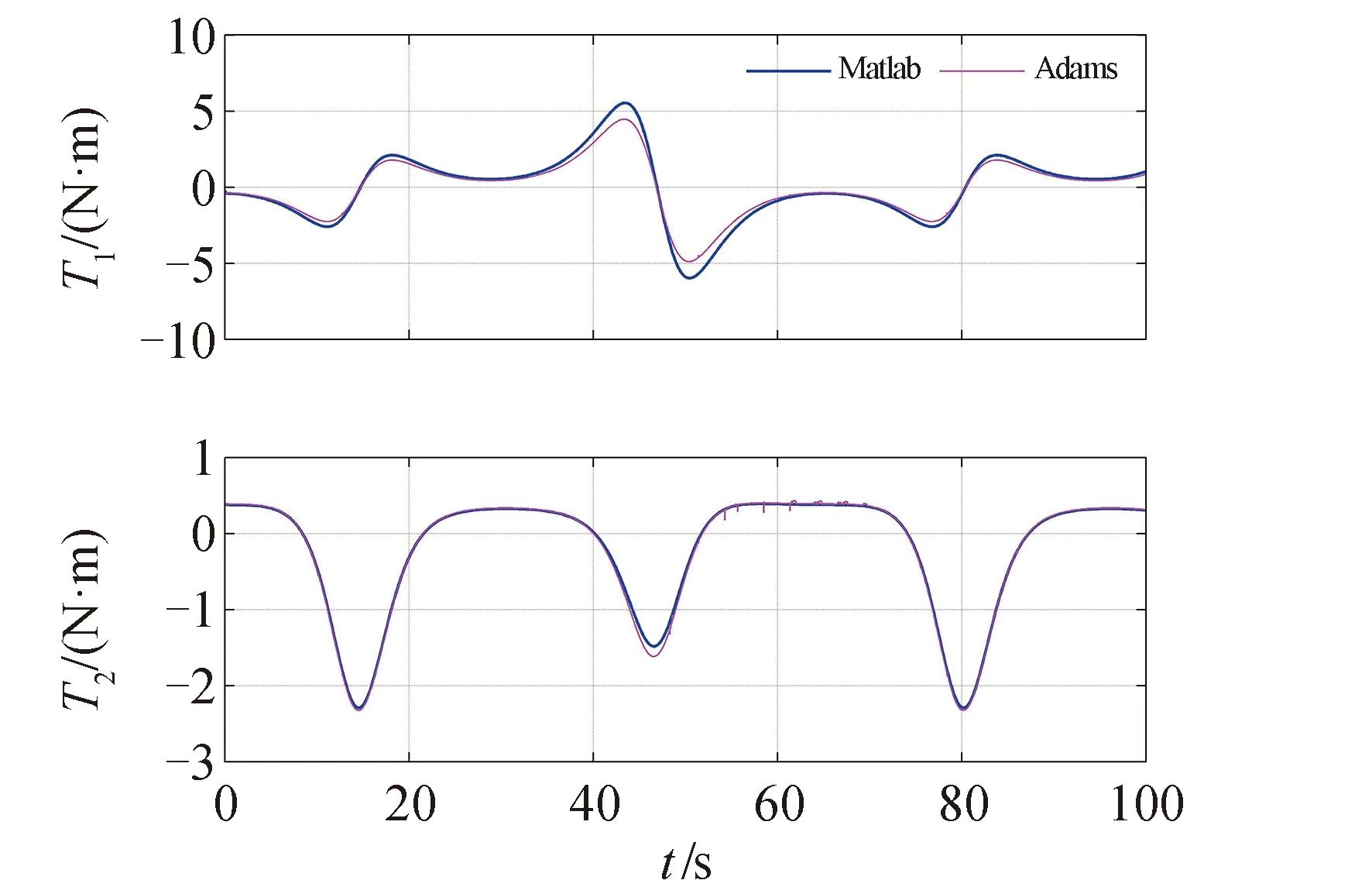
图10 天线铰链点力矩Fig.10 Torques applied on hinges of the antenna
2.2 整星系统动力学
假设附件质量相比中心体质量很小,附件的运动对系统质心位置影响可忽略,且整星姿态角速度远小于天线转动速度,则系统相对质心o的动力学方程为:
式中:B为卫星本体;T为整星姿控力矩。求解上述方程可得:



由T的表达式可知,天线运动角加速度对整星姿态角速度的影响,通过引入相应的前馈补偿力矩将可以抑制天线运动对整星姿态稳定度的影响。
3 数值仿真
针对本文所提出的协同控制方法,本节基于GF-7双轴运动天线的捕获过程开展动力学仿真,验证基于迭代计算和前馈补偿相结合的天线扰动抑制方法的性能。卫星工作模式为三轴稳定对地飞行,仿真第3 000 s引入天线控制。为了突出力矩补偿效果,这里不考虑其他环境干扰力矩。天线结构与安装参数采用GF-7参数,考虑两个控制周期的时延(0.25 s),扰动抑制仿真效果如图11、图12所示。仿真表明,基于迭代计算的路径规划方法可获得光滑的指向路径,但仍然会对卫星姿态造成一定的扰动;进一步引入力矩补偿后,整星姿态稳定度优于2×10-5(°)/s,与未补偿时(>2×10-4(°)/s)相比,天线扰动影响下降90%。
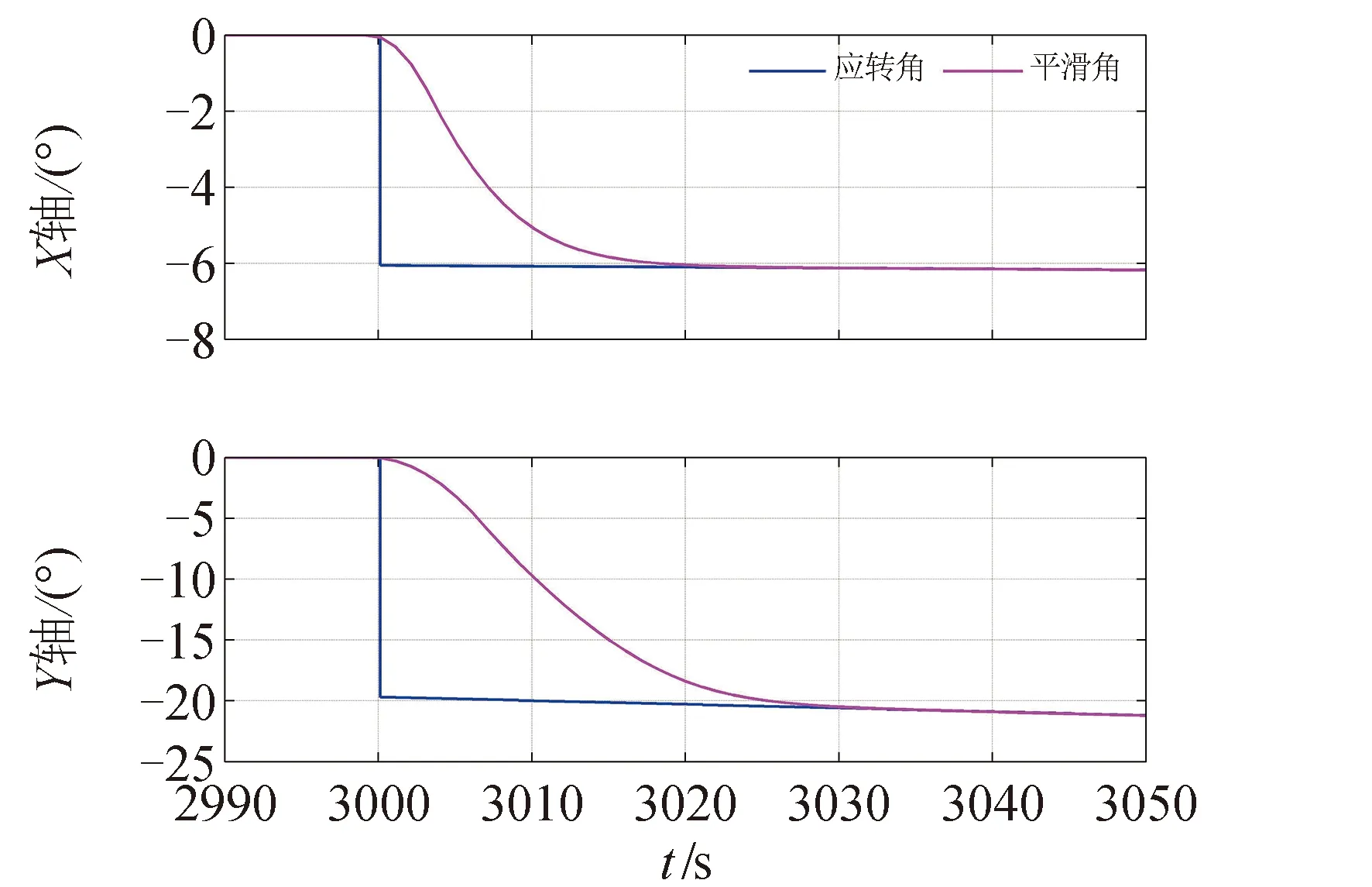
图11 天线转角Fig.11 Rotation angles of the antenna
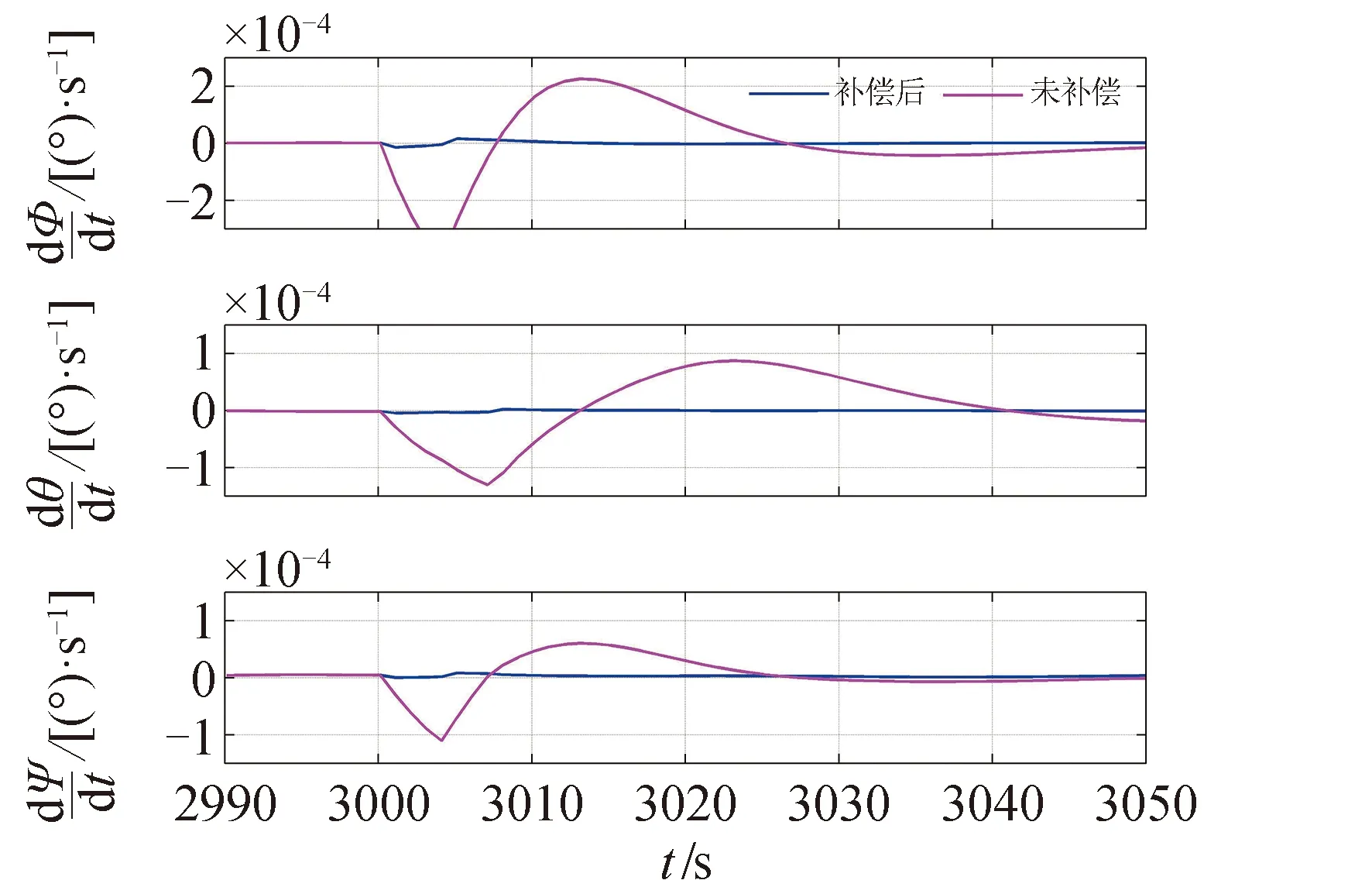
图12 卫星姿态角速度对比Fig.12 Satellite angular velocities with and without compensation
4 结束语
为了进一步提升GF-7姿态扰动抑制能力,本文针对星载天线扰动问题提出了后续改进方案,创新点包括:
1)基于迭代规划的思想提出了一种具有全局光滑性,且快速收敛的动目标路径规划方法;
2)给出了天线铰链点力矩的精确表达,适用于整星高速运动时的情况;
3)给出了天线扰动力矩的解析表达式,避免了采用角动量差分可能带来的补偿力矩不连续性。
后续将进一步开展柔性天线扰动问题研究,将本文所提出的思想和方法进一步推广应用于具有结构柔性或关节柔性的运动天线姿态扰动抑制。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
太空探索(2016年3期)2016-07-12 09:58:35
太空探索(2016年1期)2016-07-12 09:56:05
火控雷达技术(2016年1期)2016-02-06 02:18:01
电源技术(2015年11期)2015-08-22 08:50:38
中国铁道科学(2015年4期)2015-06-21 06:46:06
航天器工程(2014年2期)2014-03-11 16:35:24