永磁同步电机矢量控制MATLAB仿真
2020-11-28 07:39李隆鑫
西部论丛 2020年11期
李隆鑫
摘 要:随着科技的发展,近年来永磁材料制造技术得到飞速发展,永磁同步电机(PMSM)具有体积,质量轻,噪音小,承担过载能力强等优点,在日常生活中使用得越来越普遍,本文将针对PMSM的矢量控制进行研究。当前我国工业自主生产处在飞速发展阶段,电机作为生产工具的核心部件,而矢量控制系统在电机中起着至关重要的作用,矢量控制研究技术含量高,在实际环境中不易操作,本文通过使用MATLAB/Simulink仿真技术搭建控制系统,研究矢量控制原理特性,针对所选空间矢量控制方法进行仿真模拟,对仿真结果进行研究分析。
关键词:永磁同步电机; Matlab; Simulink; 空间矢量控制; 仿真
1永磁同步电机的发展
人类历史上第一台电机就是永磁电机,但由于开采能力低下,磁体制作材料使用的是天然磁铁矿石,导致其初来乍到,问题繁多,性能并没有达到预期效果,迅速被电励磁电机取代[1]。21世纪,随着人类生产与生活水平不断提高,对永磁同步电机的要求也越来越高,为达到这些要求,国内外自动控制技术也相应进行了飞速发展,对永磁材料的制作技术不断提升,生产出越来越高性能的永磁材料,得使永磁同步电机的生产成本随之也大大降低,适用性得到显著提高,逐渐被应用于生活的各个领域[2]。
2永磁同步电机数学模型的建立
永磁同步电动机(英文名称为permanent mag?net synchronous motor,简称PMSM),主要由 定子、转子、脉冲编码器、定子绕组、机壳等部分组成[3]。
由于本文使用电脑仿真分析,一般建立理想化数学模型,从而更加利于分析。做出如下假设:
(1)三相绕组呈Y形对称分布;
(2)忽略磁路饱和,磁路涡流对电机的影响;
(3)不考虑电机转动阻尼影响。
基于理想环境下,分别给出三相静止坐标系与两相旋转坐标系的数学模型。
建立了三相静止坐标系下的永磁同步电机数学模型后,要进行对电机矢量控制,还要先后经过Clarke变换(三相静止 A-B-C 坐标系变换到两相静止α-β坐标系)和Park变换(两相静止α-β坐标系变换到两相旋转d-q坐标系),得到d-q 坐标系下的电机模型。
3电压空间矢量脉宽调制技术的实现
脉宽调制,全称脉冲宽度调制(英文名称:Pulse Width Modulation 简称:PWM),电压空间矢量脉宽调制技术(SVPWM)正是针对生成圆形磁场而提出,此技术数学模型以及矢量转换相对简单,便于仿真过程中实时控制。
SVPWM技术数学模型的建立
本文选取id=0控制方法。通过对电压矢量的坐标变后换,将电压矢量绘制在α-β复平面上,获得两相静止坐标的分量Uα,Uβ分别取电压矢量u4与u6(且≠0),标注作用时间分别为t4和t6,t为脉冲宽度调制一周期的时间,并在α、β轴分别投射,确定扇区时,假设a,b,c三个变量。根据待合成矢量的两个分量va,vβ,由一下关系式计算a,b,c的值。得到所在扇区位置,对各扇区内的空间适量u所需基本矢量的作用时间求解得出基本时间变量的组合,得在不同扇区N对应的t1,t2 。一般在实际应用中可能出现给定电压值过大,t1+t2>t,这种情况就要对先前计算出来的电压矢量做一些处理。
4驱动控制算法 MATLAB 仿真
以上4种控制方法都有各自的优缺点,id=0控制方式相对容易实现,只需控制iq的大小就可以直接 输出转矩;最大转矩/电流控制,在相同转矩下所需定子电流最小,但算法比较复杂;cosφ=1此方法相对也复杂且效率低;恒磁链控制方式可以使电机的最大输出转矩增加,但不适用于本文研究。
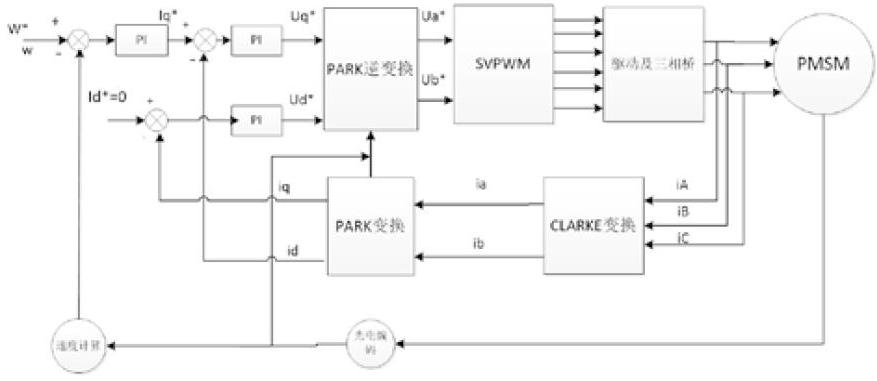
最终本文选取id=0控制方法,因为其电磁转矩与q轴的定子电流为线性关系,可以等效于直流电机,在仿真中只需要控制单一变量iq,没有过多干扰项。而且实用的表面式永磁同步电机可以再最小电流下产生最大转矩输出,减少系统能耗,提高效率。SVPWM总体设计如下图
首先通过PI控制器输出的d,q轴电压进行分别进行Park逆变换得到的ua,ub 再通过SVPWM模块输出给逆变器,使PMSM启动。
5仿真结果数据分析
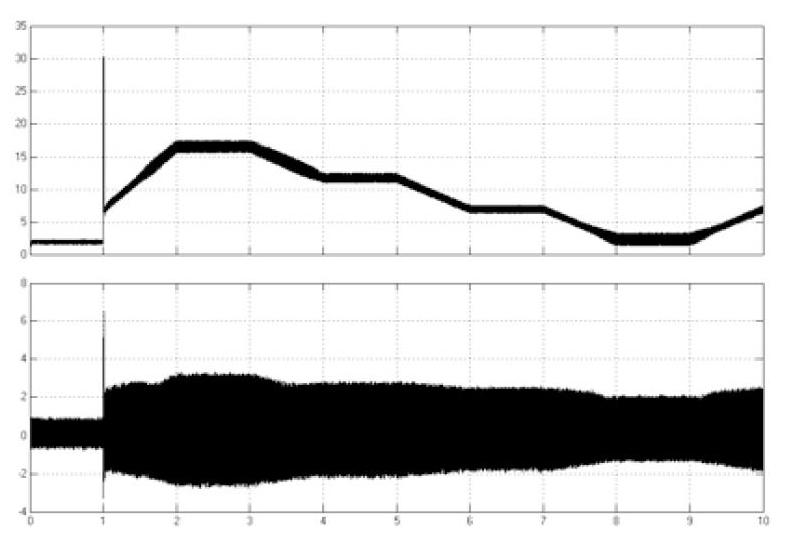
下图为q,d轴定子电流仿真模拟中采用id=0进行的矢量控制方法,因定子电流d的影响直接屏蔽,转矩几乎只取决于q轴定子电流的变换,做到实时响应,且较为稳定。虽然在初始启动阶段电磁转矩和q,d軸电流产生较大波动,随后即刻回归正常值且保持系统稳定,即使在随后的负载多次变换中也没有再次出现大波动,偏差也小。总体来看系统达到预期效果,具有良好的静态和动态特性以及控制效果。
参考文献
[1] 朱俊.稀土永磁电机的应用现状及其发展趋势[J].中国重型装备,2008(4):38-42.
[2] 史激特,葛黎新,宋璐,窦群.永磁同步电机矢量控制系统仿真研究[J].电子设计工程,2018,26(23):108-111+116.
[3] 段玉强.永磁同步电动机在火力发电厂的应用探讨[J].神华科技,2017,15(10):53-56+67.
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
企业导报(2016年6期)2016-04-21