
如何利用北斗卫星系统和ECDIS实施航道内船位监控
2020-11-27 03:21廖才明方玉林
中国船检 2020年11期
廖才明 方玉林
如何利用电子海图(ECDIS)在航道中实施定位并在定位频率及定位精度二个方面满足航行安全要求,是行业一直以来争论的焦点问题。
理念上航道内定位应根据船舶所处的环境,驾驶人员在获取前一个可靠船位基础上,继续航行至下一个测定船位的航行区间内,航行的船只不能因定位不足而让本船涉入险境。需要考虑的因素有:航道宽度、航道弯曲程度、通航密度、本船吨位大小、船舶运动轨迹与航道外浅水区或碍航物(No Go Area)的横向距离、船舶受横向流压时应配置的流压角、避让它船后驶回原计划航向的船位可控性、外部定位条件是否便利等,目前行业观点认为通常情况下以6~10分钟左右一个可靠船位能满足上述要求。
航海定位手段的优先级和ECDIS卫星定位误差校核频度
根据最新资料,船位校核应满足下列要求:
1、开敞海区或深水航区(Open sea/Deep water)
当船舶行驶在开敞或深水航区时,应每个班次(三班制方式为4小时,二班制的为6小时)校核ECDIS上的船位精度一次。
2、沿岸航行或驶近海岸、锚泊、靠离泊机动操作时,应至少每1小时用其它手段校核ECDIS上的船位一次。
3、验证船位有效性应按下列顺序或它们的组合方法择优获得可靠船位。
• 视觉观测定位(Visual observations),如导航叠标,串视物标。
• 雷达观测船位(Radar observations),较近孤立物标的距离定位。
• 平行标线法(Parallel Index),与航向成直角的平行距离差值。
• 用户终端雷达位置映像(如在驾驶台指挥位置上配有独立显示器的雷达位置——Radar Overlay/)/电子海图上的雷达数据(ENC Underlay——它可能以物标的距离和方位显示,并不一定是经纬度)。
• 查核卫星定位的精度因子《DOP checking,后文详细解说》
• 信噪比或载噪比《Signal or Carrier to Noise Ratio (SNR or CNR)》-——(该技术指标的解释见文末)。
上述要求对开敞海区和近岸航行提出了船位校核频度,但依然未触及航海中难度最大的航道导航提出可分析和可操作的依据。
航道航行利用卫星定位需考虑的因素
随着卫星导航系统的发展和ECDIS技术的成熟,给我们利用卫星定位在航道上进行实时船位监控提供了可应用的渠道,但业界一致的观点是利用卫星定位和传统航海定位手段中,下列三个问题必须明确:
1、ECDIS和传统纸质海图之间的固定位移差值。
2、其它国家提供的卫星定位系统,有可能因为某种原因而意外关闭。
3、卫星定位的精度不能让人满意,特别是港内定位,如果定位精度不能达到米级以下的话,这种定位方式是不能被业界所认可的。
对于问题1,北斗卫星系统(BDS)采用的是2019年12月发布的北斗坐标系(BDCS),与最新的国际地球参考框架(ITRF)对齐,在全球范围内与航海用的WGS-84系统相差不超过5cm,对航海而言,该差值可完全忽略。
对问题2,国产北斗3号系列在全球的成功应用,这个担忧也已经被解除,显然我们只需要分析和讨论它的定位精度问题就可以了。
对问题3,也是本文的焦点,就是GPS定位方式和精度。
卫星系统的定位原理和精度分析
本文中,GPS一词指的是所有卫星定位系统(一般叫做GNSS即全球导航卫星系统),目前,常用的有美国GPS、中国北斗、欧盟伽利略和俄罗斯的GLONASS,未来还有印度的IRNSS等,由于各系统定位原理相同,文中不分开表述,但在误差分析结论时,着重引用的是北斗3系统数据。
需要特别提请读者留意的是:GPS目前分单点和差分(DGPS)二种定位形式:
1、单点定位,即GPS接收机从导航定位信号中解码,直接根据卫星信息进行定位。
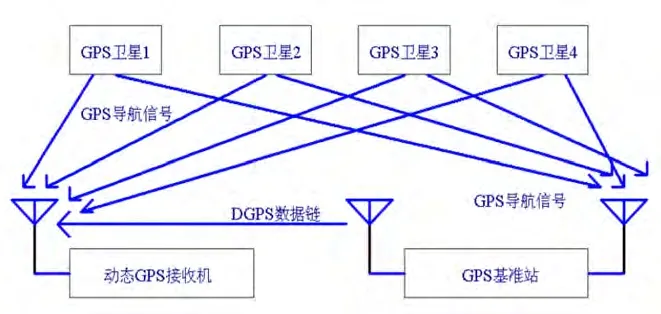
2、差分定位,也叫DGPS,其本质就是一个单点定位的GPS接收机加上一个地点固定的GPS基准站共同进行定位的方式。其中基准站的数据是一种后处理数据,也叫做DGPS数据链,通过接收DGPS数据,接收机对当前的定位坐标进行修正,从而得到更精确的导航坐标,过程可以用上图来表示。
目前差分情况下的精度已经小于1米,有资料称大多数在0.4~0.5米左右,在消除本轮的固定误差后,这样的精度已完全满足港内导航要求。
下面的误差分析是针对单点定位进行的论述。
1、GPS定位方式和定位原理简述
• 2D模式(2 dimension)卫星数据结合天线仰角高度而得出的船位。
• 3D模式(3 dimension)三维定位,需要4颗或更多的卫星。
• 差分模式(DGPS)信标台接收卫星信号后,通过已知准确位置的基站发送给GPS系统的误差校准数据,提高定位精度。
显然,其精度依序为DPGS优于3D更优于2D。
具体到JRC的JLR-7700II,如果收到4颗及以上卫星信号的时候,GPS接收机显示3D模式定位;如果收不到4颗卫星,只有3颗卫星信号时,GPS接收机采用2D模式定位(即只提供平面定位,此时JLR-7700II需要并入预先置入的天线高度参数计算;也就是说2D模式时,如果预置的天线高度误差较大的话,引出的船位误差可能会比较大,但随着卫星发射数量的增加,接收机上出现2D现象已基本消失,中国已经于2020年7月31日正式开通北斗3系,美国也在最近发展到了GPS-3A系,据称北斗3系的民用精度小于5m,GPS-3A系精度为1m)。
最新公开报道的北斗三号卫星系统定位精度均值为2.34米,该准确度应是单点精度,也已满足大多数港口航道导航所需。
2、GPS定位误差
和其它导航系统一样,卫星系统也有固定误差和随机误差,而随机误差中主要影响的是系统的精度因子(精确度因子)。
(1)在GPS中描述精度误差的大小用定位精度因子(DOPDilution of Precision)来表示,即“精度强弱度”,或者就理解为“误差系数”。它和“准确度”意思不相同,表述方法是:观测成果的好坏与被测量的卫星和接收仪间的几何形状有关且影响甚大,计算该误差量就称为精度的强弱度。天空中卫星分布不均,这个数字就会增加,如果卫星分布均匀,这个数字就会更小,反映出的定位精度也就越高,卫星接收机的定位精度值和该值相乘,可换算出最终测量误差(在数学上它就是个误差系数),主要使用的参数有下列几个:
• HDOP——水平精度因子(2D平面座标精度因子—最常用)。
• VDOP——垂直座标精度因子(离海平面的高程,如飞机在空中飞行时,飞机需要知道离海平面的高度)。
• PDOP——3D位置点位精度因子。
• TDOP——时间精度因子。
• GDOP——几何精度因子(三维坐标与时间精度因子)。
DOP越小定位精度越高,民用导航中仅使用水平精度因子(HDOP)和垂直精度因子(VDOP)已经满足要求,对于航海而言,船舶始终在海平面行驶,垂直高度已经用地理坐标系修订,所以只需考虑水平精度因子(HDOP)这一项,下表给出了它的表征值。
(2)卫星接收机本身的定位准确度(Position Accuracy,也叫定位精度)
用来表述GPS接收机的水平定位精度,使用的是均方根值(RMSRoot Mean Square), 假 如RMS值为1.2m,是指“使用测试数据统计得到,测量位置与真实位置之间水平误差的标准差为1.2m,意味约65%测量值与真实的误差在1.2m以内”,目前大多数产品说明书上标明的单点误差在1.0米~1.2米之间。
(3)单点定位的误差计算
整合系统误差和接收机误差二个因子后,根据2.1和2.2,误差计算举例说明如下:
假如接收机的定位精度为1.2米,某时刻HDOP值为20,那么此时的定位误差为1.2×20=24米;如果该时段的HDOP值为5,此时误差为1.2×5=6米,所以表格中列明,如果要用于航道内导航,HDOP值必须小于5。
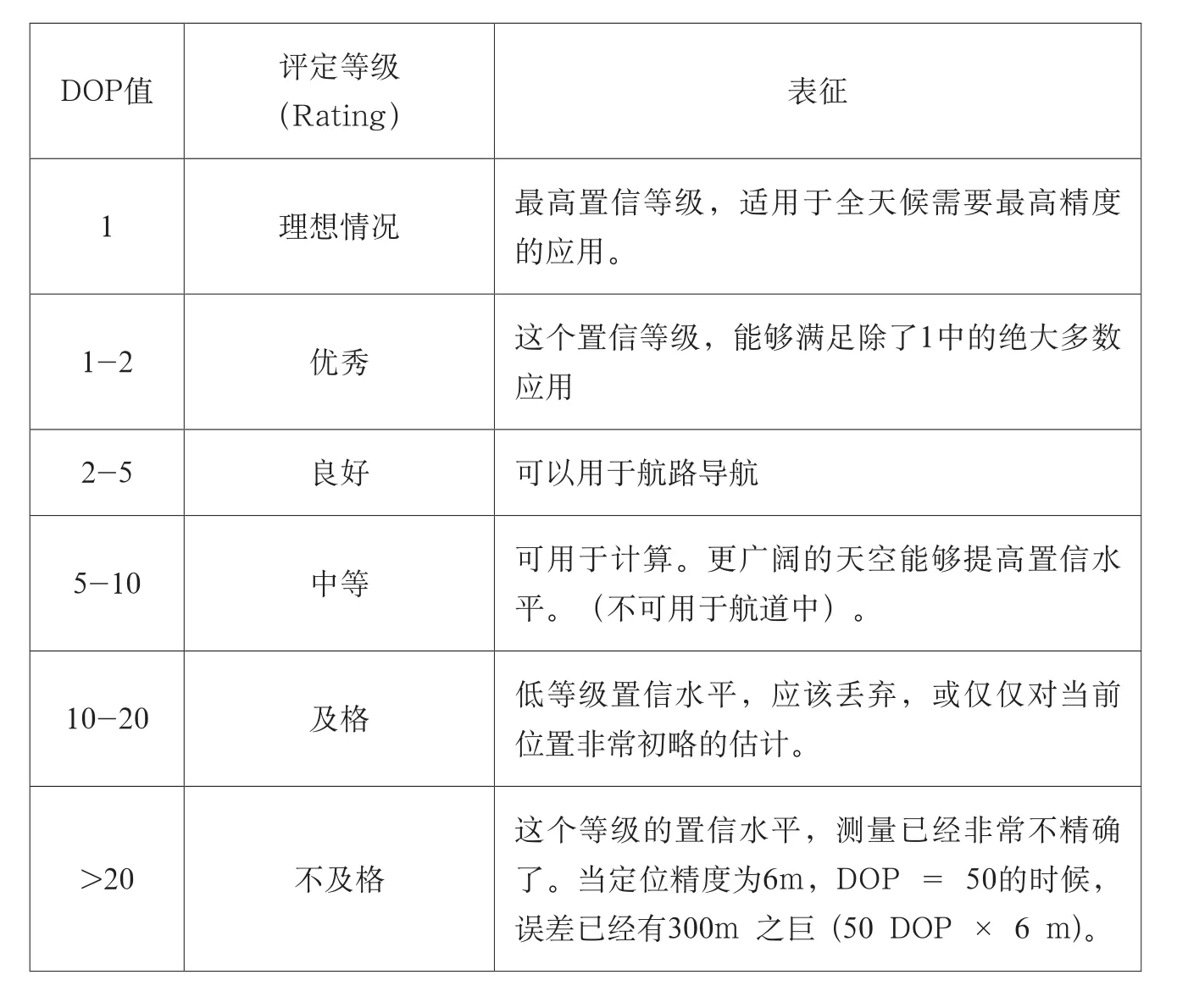
D O P值 评定等级(R a t i n g) 表征1理想情况 最高置信等级,适用于全天候需要最高精度的应用。1-2 优秀 这个置信等级,能够满足除了1中的绝大多数应用2-5 良好 可以用于航路导航5-1 0 中等 可用于计算。更广阔的天空能够提高置信水平。(不可用于航道中)。1 0-2 0 及格 低等级置信水平,应该丢弃,或仅仅对当前位置非常初略的估计。>2 0 不及格这个等级的置信水平,测量已经非常不精确了。当定位精度为6 m,D O P = 5 0的时候,误差已经有3 0 0 m 之巨 (5 0 D O P × 6 m)。
有些文章介绍为6或者7以下,鉴于现在尚处于摸索阶段,建议控制在5以下,某些仪器的HDOP选项有4/10/20三个,如果是航道导航,应置于最高档的4,但别忘记了在开航后恢复原始状态。较高的门限便于选择高精度定位,但同时也有可能因为卫星分布不均衡时,接收机得不到船位。
实际操作注意事项
1、正确设置GPS主数据中的水平偏移量和天线偏移量(类似于消除固定误差和磁罗经的自差)。
驾驶人员应了解本船卫星接收机天线位置,需要注意的是即使天线处于艏艉中线上,也有可能存在天线偏移量,它需要人为设置并对本船数据进行正确验证,有可能还需要技术图表来表示。
这个步骤必须在开航前完成,因为它可能涉及在管理员模式下操作ECDIS。
对该段文字的理解有两个方面:
(1)天线不在艏艉中线上,那么它一定存在水平偏移量,大型船只可能达10多米,这个误差已经远远超过卫星系统的误差,必须纠正。
(2)即使天线在中线上,但接收机受到周边其它电子设备的电磁场等因素干扰后,它也会出现一定的位置偏移,随方位或者舷角的不同而有所改变,那么理解上它类似于磁罗经的自差,测定时应以精准船位为基点,测出不同方位(舷角)上的误差值,然后绘制成图表。
最后测定的偏移量小于一定的数量级时,可根据本轮吨位大小做取舍,如2万吨级以上船只测定的偏移小于1米应可忽略,但应有相关记录证明。
2、现有设备中大多数北斗接收机兼容GPS系统,但有部分GPS却不兼容北斗,但新生产的产品应是双系统兼容的为主,驾驶人员应了解本船接收机在进入中国海域时是自动选择还是人工选择北斗系统,可在接收机上做选择,如果是自动模式的,可从显示屏上给出的信息做出判断。
以JRC为例,JRC ECDIS GPS信号接入:
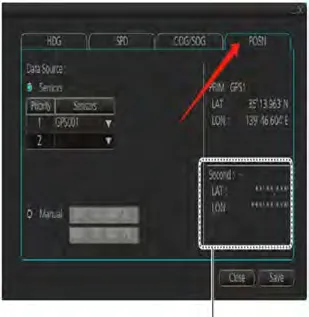
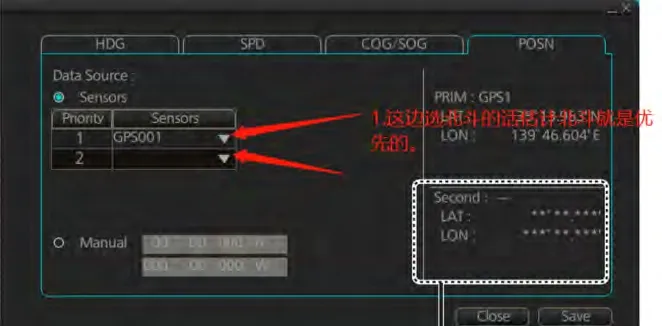
(1)JAN-901B/701B:直接由GPS1和GPS2输出(不通过选择开关和放大器)接入两路信号,在MAIN-SETTING-SENSOR选择使用。在这种情况下,卫星船位可通过手动选择,如选择GPS还是北斗;
(2)JAN-9201/7201:
①接入三路GPS信号(其中一路为北斗卫星);
②CCU(ECDIS主机)接入通过选择开关和放大器输出的GPS信号;
③SLC(串口信号接收单元)接入直接由GPS1和GPS2输出的(不通过选择开关和放大器)两路信号;
④GPS信号自动选择,SLC优先。
实操举例
JRC的JLR-7700II模式选择
1、自动模式
(1)当GPS接收机接收到4颗卫星信号时将以自动3D模式定位(如收到4颗以上卫星信号,接收机将选择位置分布比较好的4颗卫星,HDOP将相应的变小,定位精度提高),屏幕显示AUTO。
(2)当GPS接收机只接收到3颗卫星信号时将以自动2D模式定位(天线高度为3D模式下的最后一个天线高度),屏幕显示AUTO。
2、天线模式(2D only mode):在人工输入比较准确的天线高度后,将以2D模式定位,屏幕显示2D。
3、DGPS(差分模式)
当GPS接收机接收到差分信号时(radio-beacon),相应的卫星编号处颜色会加深,此时将以DGPS模式定位(自动使用AUTO模式),屏幕显示D。

误差分析和运用结论
前述已分析北斗3系的误差是满足港内导航要求的,JRC的JLR-7700II的准确度描述如下:
13m 2DRMS (HDOP≦4 SA off)
(2倍均方误差为13米,Selective Availability关闭,即采用10米高精度模式,HDOP≦4)。
5m 2DRMS(Beacon selected)
(2倍均方误差为5米,采用基站纠差模式)。
7m 2DRMS(SBAS selected)
(2倍均方误差为7米,采用基站宽泛纠差模式,SBAS解释见文末)。
数据表明单点定位时,即使HDOP≦4,它的2倍均方误差为13m,该精度用于港内导航稍显不足,如果HDOP值≦2,即误差为2-5米时,可以使用。
差分情况下,其2倍误差最大为7米,可以用于港内导航。
需注意到,该种机型的误差测定早于2011年,正如本文开头所说,随着GPS-3A系的发展,该误差应被更优化了。
上述的分析是基于业界公认的雷达测距定位完全适用于航道导航而作的量化比较,雷达固定距标的测距误差为所用量程的0.25%,以3nm为常规测量近距离物标时,其误差为3×1852×0.25/100≈13.9米,那么结论就有了,雷达定位精度能被业界认可,显然定位精度优于雷达定位的卫星系统也一样能被业界所接受。当然实际使用时雷达在3NM的测距误差通常应<5米。

需要注意的关键点:
1、DGPS已接收差分信号时,DOP不能被人为改变;
2、2D only mode可人为输入较准确的天线高度以降低VDOP值来提高定位精度;
3、AUTO模式下将自动选择位置分布比较好的卫星以降低HDOP来提高定位精度;
4、HDOP值仅仅是单点定位时的误差评价指标,反映的是自然条件下卫星系统定位出现的误差因子,因此当有基站做差分纠正时,HDOP已经没有意义,所以不能选择。
结论和建议
1、ECDIS提供的实时显示船位信息和可以人工设置的定位间隔,与纸质海图上用定位方式获取船位有很大区别,船长和驾驶员可随时查看本船船位在航道中的位置,运用接收机提供的偏航或边界(XTD/BOUNDARY)报警等功能,如果导航精度满足要求,它为航道航行提供了极大的便利和安全性。
为了确保定位的可靠,驾驶员应根据择优获得可靠船位方法定期校核船位,以防止GPS/北斗卫星信号或人为设置错误等,但使用了ECDIS的实时监控功能时,显然不应再有多少分钟定位一次的要求,但需确定此时的船位是可靠的。
2、目前仍然有信息称卫星系统在某些区域会受到外界干扰而出现非常大的误差现象,这一点应引起航海者的充分警惕,特别是当船只经过大功率雷达站或电离层异常(如雷暴)时,有时候可能出现GPS信号丢失现象,应确保船位的可靠。
3、该文章目前仅仅是对能否利用ECDIS的卫星船位在航道内导航做技术分析,不能认为这样的分析就是可操作的依据,各位读者可在总结分析的基础上逐步完善并制定出操作规程,有了可验证的方法后,可运用于实际操作。
● 小贴士
1、信噪比和载噪比
卫星信号在传输过程中,噪声和干扰是影响通信质量的主要因素。来自内部产生的连续随机杂波对有用信号的影响,我们称为噪声。外界信号侵入和有源器件产生的谐波及杂波的影响我们称为干扰。
信噪比(SNR或者S/N):表示卫星信号的平均功率与噪声功率的相对强度。
载噪比(C/N):表示载波与噪声的相对强度。
它们的单位都是分贝(dB),二者区别在于,载噪比中的已调制信号功率包括了传输信号的功率和调制载波的功率,而信噪比中仅包括传输信号的功率,卫星定位系统中该二者数值非常接近,有效数值范围为01~99dB。
在IMO的MSC通函中,衡量该指标的单位并不是分贝,而是dBm(分贝毫瓦),二者换算关系较复杂,日常使用时接收机上显示的数值在30-40左右是理想,20-50也正常,因和本文关联不大,在此省略。
2、SBAS
Abbreviation of Satellite Based Augmentation System. It is a blanket term for wide scale GPS support systems using fixed position satellites which send GPS error correction data over a wide range.
中国船级社召开华中地区委员会2020年年会
2020年10月20日,中国船级社(CCS)华中地区委员会2020年年会在武汉顺利召开,来自华中地区的政府主管部门,以及造船、航运、船舶配套制造单位的60多名委员代表出席了会议。CCS副总裁范强参加了会议。会议围绕“贯彻落实交通强国战略,助力长江经济带高质量发展”主题进行了深入探讨。与会代表们就绿色环保、智能船舶、新能源应用等方面议题结合各自单位实际情况作了经验交流,并对CCS未来的发展提出了宝贵的意见和建议。范强副总裁介绍了CCS在疫情防控期间发挥的作用和2020年工作中取得的成绩,以及围绕交通强国建设、长江航运高质量发展和全面推进国际一流中国船级社建设目标任务的工作成果。他表示,在未来的发展中,CCS将秉承过往,全力服务长江地区航运、造船和产品配套等相关行业,与业界同仁在多平台全方位通力合作,发挥CCS在技术、管理、区位、资源等方面的整合优势,共同谋划提升长江航运、造船和相关制造业的整体实力,合力谱写交通强国建设和长江经济带高质量发展新篇章。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
导航定位学报(2022年1期)2022-02-17
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
珠江水运(2019年2期)2019-02-18
