
柔性压力传感器的研制
2020-11-26 03:46刘胜强谭晓兰吕博刘德祥周文博
机械工程师 2020年10期
刘胜强,谭晓兰,吕博,刘德祥,周文博
(北方工业大学机械与材料工程学院,北京100144)
0 引 言
近年来,许多的专家学者对基于外延层和柔性压力衬底的传感器和MEMS 压力传感器的应用进行了研究。以柔性压力材料为衬底的传感器具有良好的电绝缘性及力学性能, 使得柔性压力基底材料的传感器和MEMS 柔性压力传感器被广泛应用。基于柔性外延层和压力衬底传感器目前作为一种新型的压力传感器已经发展成为各种电子设备的皮肤[1]、可穿戴传感器等电子设备[2-5]、柔性人机交互设备[6]等各种领域的核心元件。现如今,随着信息化时代的不断发展,基于柔性基底的各种压力传感器正逐渐应用在娱乐、汽车、医疗、消费电子和工业等领域[7]。本文主要就以聚对苯二甲酸乙二醇酯(PET)为基底[8]、锆钛酸铅(PZT)纤维为压电材料的压力传感器进行两种不同结构(平行与圆形)的结构设计和工艺流程的完善,进而提高以柔性材料为基底的压力传感器的工作灵敏度和系统的稳定性。
1 柔性压力传感器的结构设计及原理分析
1.1 柔性压力传感器的结构设计
柔性压力传感器的结构和组成部分如图1 所示。根据柔性压力传感器的性能需求,本文使用PZT-5H 作为制作纳米纤维的材料[9]。
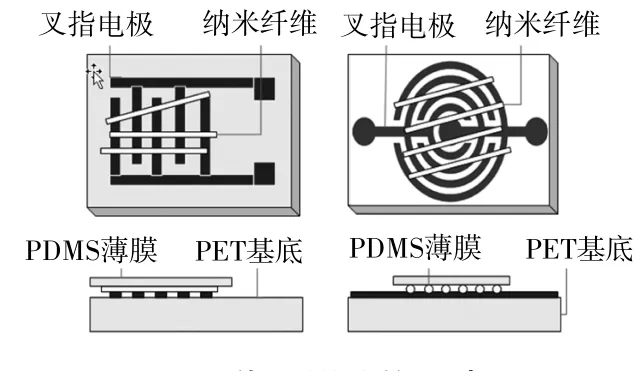
图1 传感器结构示意图
1.2 柔性压力传感器的原理分析
柔性压力传感器的原理是以输出电信号的大小来表示被施加的压力信号的大小,当对柔性压力传感器施加压力而使其发生变形时,一根纳米纤维在施加的压力作用下发生形变,其自身会出现极化现象,正负离子游动在纳米纤维的两端,一端聚集正离子另一端聚集负离子,这样便形成了电势差。本文的柔性压力传感器是将PZT 纳米纤维和叉指电极结合在一起,与叉指电极接触的纳米纤维相当于在叉指之间被阻断成一个电势差,整体的传感器就是无数个电势差并联在一起的;传感器的压电特性由材料而定,当选定材料后,叉指电极两端的电势差的大小便随着施加压力的大小变化而变化,所以施加在传感器上的压力大小能被叉指电极两端测量的电压大小计算出来[10]。柔性压力传感器的原理如图2 所示。
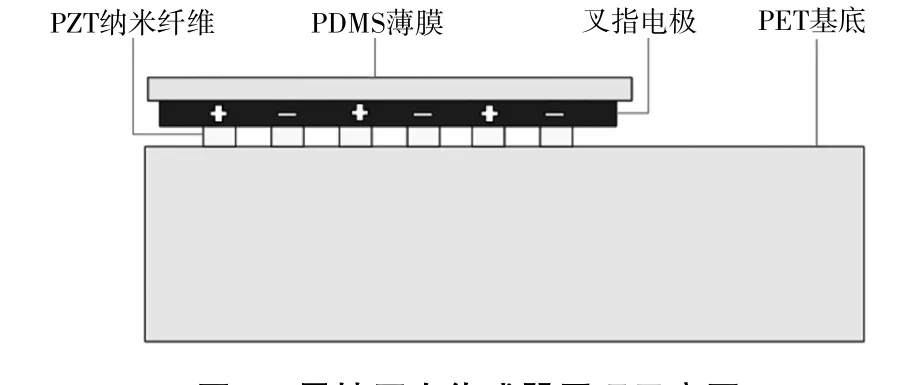
图2 柔性压力传感器原理示意图
2 柔性压力传感器的参数确定
采用退火后的PZT纳米纤维直径进行计算,其直径为φ190 nm,且其压电常数d33=67 pm/V[10-11]。
PET基底厚度为0.175 mm,长宽由叉指电极而定;PDMS薄膜厚度约为0.2 mm;ITO叉指电极分为圆形和平行形2种,两种电极的工作面积大小相差无几,因此不会因工作面积的大小影响测量的结果。ITO叉指电极的具体结构尺寸如图3所示。
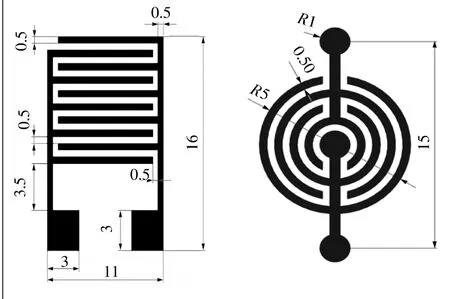
图3 ITO 叉指电极结构图
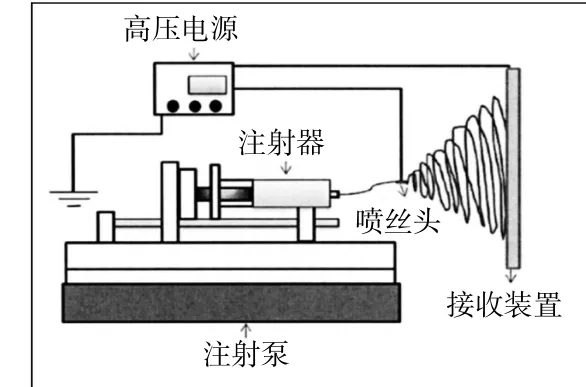
图4 静电纺丝装置示意图
3 柔性压力传感器的制作
3.1 叉指电极的设计和制作
叉指电极选用具有导电率高、刻蚀容易的ITO[12]。首先把选用的厚度为0.175 mm 的PET 薄膜清洗一下去除表面附着的灰尘杂质,使用酒精蒸汽干燥保持表面清洁光亮;其次使用磁控溅射将ITO 附着在薄膜上,在加入ITO 之前对PET 薄膜表面增加一层SiO2,目的是利用SiO2的化学性质增加了ITO 在薄膜上的附着能力,防止反复实验时ITO 脱离PET 薄膜;最后将光刻胶均匀涂在PET 薄膜上,经曝光机进行曝光和显影液对其显影后,清洗去除表面的光刻胶即可制作成叉指电极。
3.2 制作PZT纳米纤维
本文使用组装简便、体积小、容易操作,并且用控制性好的静电纺丝装置来制作纳米纤维,静电纺丝装置主要有5 部分组成:1)高压电源为装置整体提供电压;2)注射器装载PZT 前驱体溶液;3)喷丝头在高压下喷射液体流;4)注射泵推动注射器;5)接收装置接受纳米纤维。静电纺丝简单装置如图4 所示,这3 个部分组成的有低压射流接收装置、高压静电纺丝发生器和射流接收装置[13-14]。
静电纺丝溶液的黏稠度不仅会改变纳米纤维的形状,还会改变纳米纤维的特性,直径分布不均匀的纳米纤维就是因为前置溶液黏稠度高;但黏稠度过小时射流无法形成[15]。本实验中加入少量PVP(聚乙烯吡咯烷酮)调节浓度,静电纺丝前置溶液配置如图5 所示。
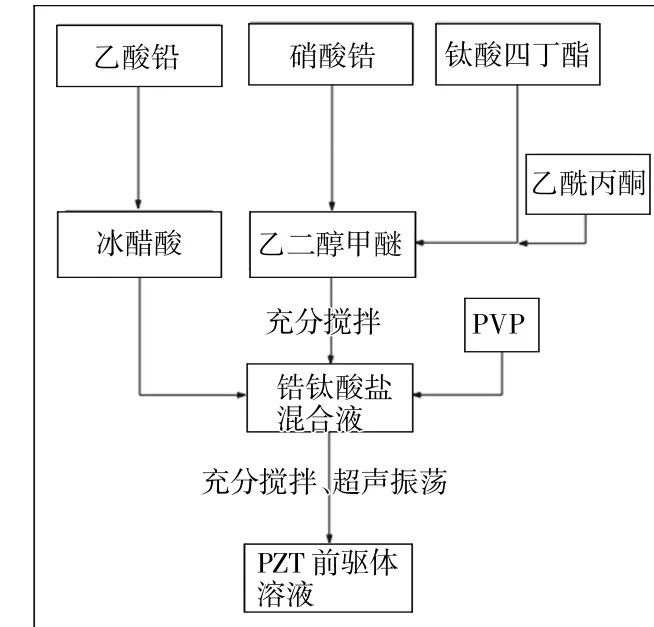
图5 PZT 前驱体溶液配置流程图
静电纺丝装置是在湘潭大学材料科学与工程学院自组装的,如图6 所示。其工作环境温度为21.9℃,湿度为40%,溶液的浓度为0.4 mol/L,其它各项参数如表1 所示。
第一步,先将PZT 纳米纤维放入60 ℃的DZF型真空干燥箱保持10 h ;第二步,调节每分钟增加5℃,当温度达到400 ℃保持0.5 h;第三步,继续调节温度在550 ℃时保持2 h;第四步,将PZT 纳米纤维取出自常温放置慢慢慢冷却[10]。流程图如图7 所示,图8 为PZT 纳米纤维显微镜图。

图6 平行电极静电纺丝装置实物图
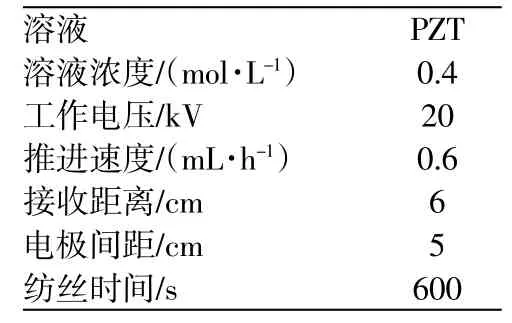
表1 平行电极静电纺PZT纳米纤维的各项参数
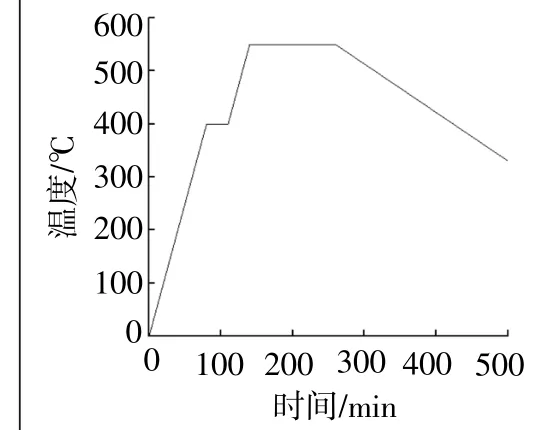
图7 PZT 纳米纤维退火处理过程图
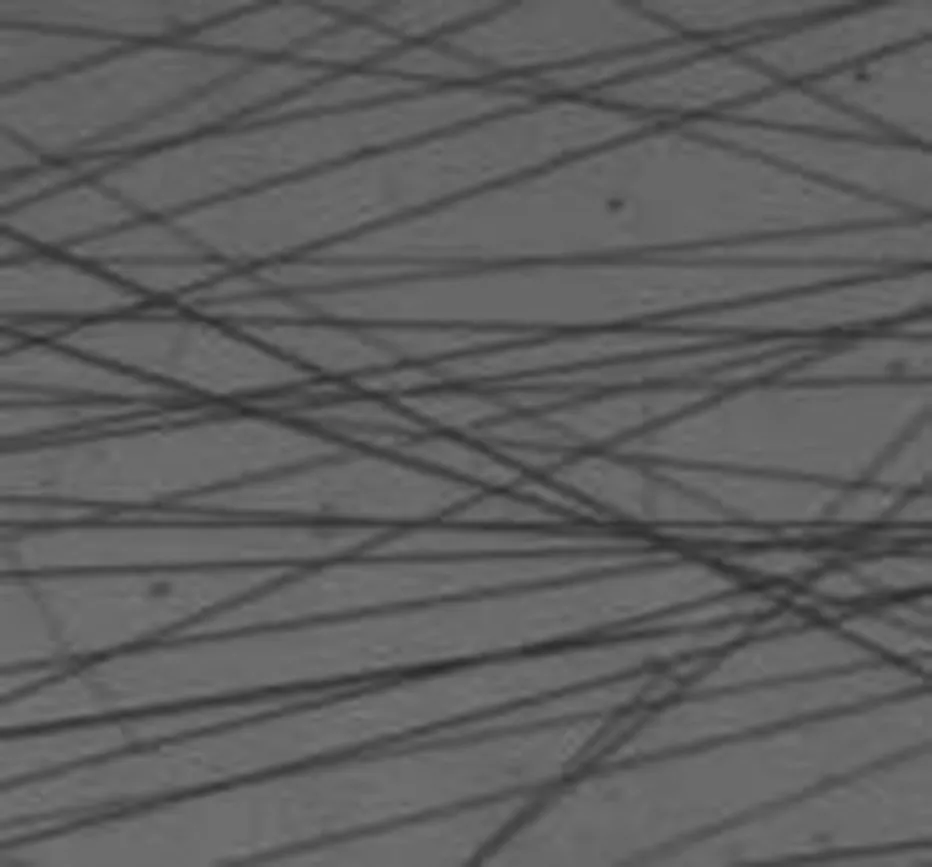
图8 静电纺PZT 纳米纤维显微镜图
3.3 PDMS薄膜的制作
制备PDMS 柔性薄膜的方法有多种,本文采用旋涂法,此方法操作简单,制备出来的柔性薄膜均匀有弹性。图9 是PDMS 柔性薄膜的制作过程。
3.4 制作出传感器样品
按照上述方法,制作出的柔性压力传感器具体实物如图10 所示。
4 数据测试与分析
测试流程:信号发声器发出信号传入放大器,经放大器放大把信号传递给激振器,激振器工作振动柔性压力传感器,柔性压力传感器发出电信号导入示波器,示波器显示出电信号大小,如图11 所示。
测试条件:动态压强大小为20~60 kPa、在动态压强40 kPa、动态压强响应频率100 Hz 下连续工作30 000 次。
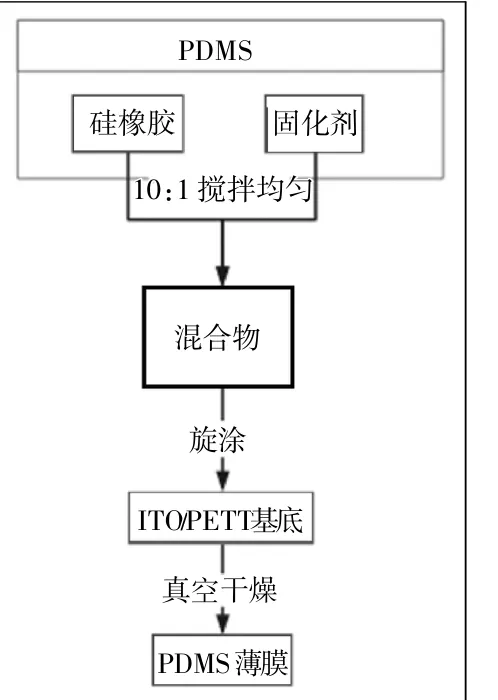
图9 PDMS 制作流程
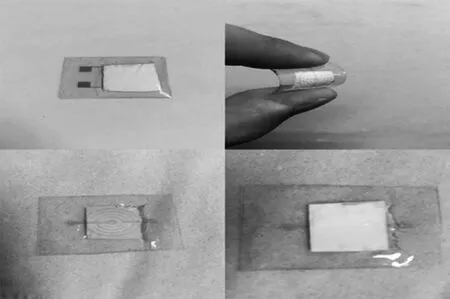
图10 柔性压力传感器样品图片
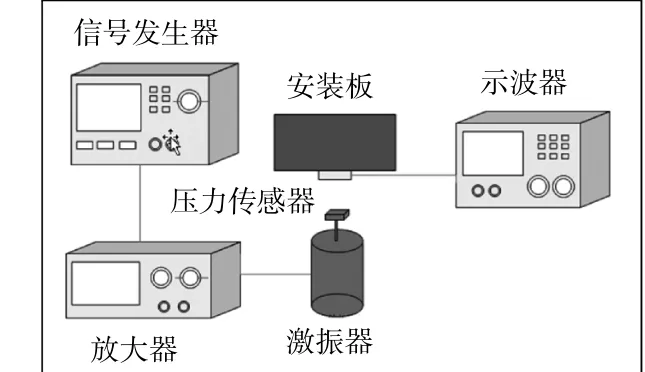
图11 测试系统示意图
1)在动态压强响应频率为100 Hz 的条件下, 以每次采集增加10 kPa 将动态压强大小从20 kPa逐渐增加到60 kPa,然后收集5 组实验数据,观察分析动态压强频率大小变化的响应特性,软件分析整理结果如图12 所示。
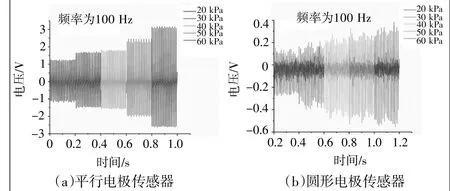
图12 软件分析结果
在100 Hz 条件下平行叉指电极和圆形电极两种柔性压力传感器的开路输出电压都伴随着动态压强的持续增大而不断增大,达到最大时的动态压强是60 kPa。
从图13 中可以看出,两种传感器输出电压与压强大小都近乎呈线性关系。通过软件拟合得到传感器的灵敏度:平行电极S=0.053 V/kPa、圆形电极S=0.005 V/kPa,说明动态压强响应特性相比较时,平行电极要好于圆形电极。
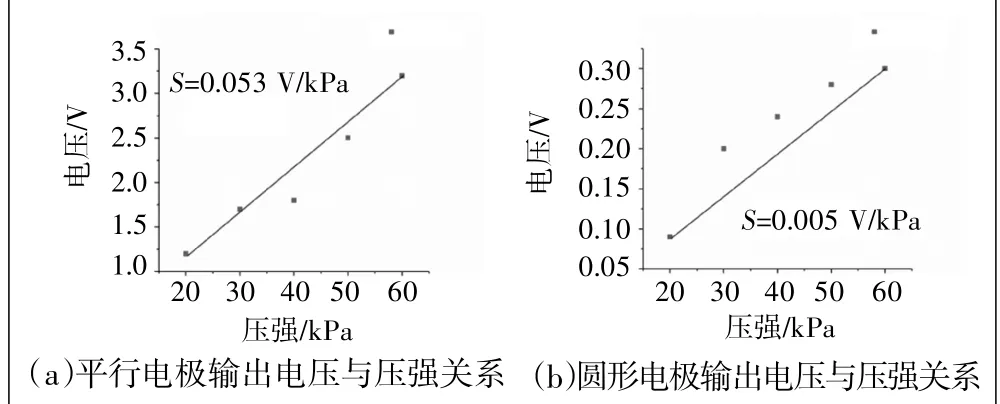
图13 两种传感器输出电压与压强关系
2)使柔性压力传感器在40 kPa 压强和100 Hz 压强频率下连续工作5 min,间隔1 min 收集1 次柔性压力传感器输出电压,将收集到的数据传入软件整理,根据输出电压大小变化得出柔性压力传感器是否稳定可靠。图14 表示柔性压力传感器连续工作5 min 的输出电压曲线。
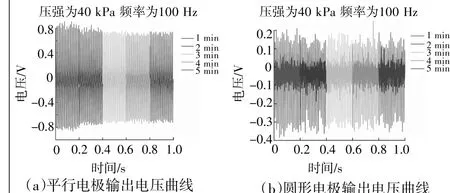
图14 柔性压力传感器连续工作5 min 输出电压曲线
图14 中压力传感器在压强大小为40 kPa,压强频率为100 Hz 条件下工作时,平行电极的传感器的开路输出电压有一定程度的减小,两者进行对比,圆形电极的传感器开路输出电压变化大很多,所以圆形电极的传感器可靠性更高。
6 结 语
本文通过研究设计并实验制作了两种不同结构的新型柔性动态压力传感器,通过柔性压力测试系统分别对两种传感器进行了动态压强大小频率响应特性、传感器稳定性的测试。结果表明:两种传感器的输出电压都随着动态压强频率的增大先增加后减小,在100 Hz 响应特性最好,与结构的不同近乎无关;随着动态压强的增大两种传感器的输出电压都成线性增加,其中平行电极的灵敏度S=0.053 V/kPa,远大于圆形电极的灵敏度S=0.005 V/kPa,所以对于采用相同压电材料的动态压力传感器,不同的电极结构会使其具有不同的稳定性和灵敏度; 这两种类型的传感器的设计和制备可以很好地为新型柔性动态压力测试系统传感器的设计制备和应用提供一定的依据和参考, 对其发展和应用具有重要的指导意义。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
九江学院学报(自然科学版)(2022年2期)2022-07-02
小哥白尼(趣味科学)(2022年2期)2022-05-25
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
孩子(2020年11期)2020-11-17
趣味(数学)(2019年6期)2019-10-17
科学大众·小诺贝尔(2016年11期)2017-01-10
燕山大学学报(2015年4期)2015-12-25
蚕桑通报(2015年1期)2015-12-23
