猕猴桃采摘机械移动平台结构设计及运动学仿真分析
2020-11-23 01:44叶振环李永强朱正龙汪玉兰付娟
科技创新与应用 2020年33期
叶振环 李永强 朱正龙 汪玉兰 付娟

摘 要:鉴于猕猴桃集中采摘季节需要投入大量的人力物力,对高效率的猕猴桃采摘机器人的研究有着重要的意义。针对猕猴桃的种植方式及环境因素,文章采用四轮独立控制进行转向,液压缸直接控制升降对猕猴桃采摘机器人移动平台进行了设计。应用ADAMS软件对设计完成的移动平台进行了运动学仿真,结果表明设计完成的移动平台结构无论在空载还是满载情况下均能够满足平动及转动工作状态下的可靠性和平稳性要求。
关键词:猕猴桃采摘;移动平台;结构设计;运动学仿真
中图分类号:TH133.33 文献标志码:A 文章编号:2095-2945(2020)33-0006-05
Abstract: In view of the large amount of manpower and material resources required for the kiwifruit picking season, it is of great significance to study the efficient kiwifruit picking robot. According to the planting method and environmental factors of kiwifruit, this paper adopts four-wheel independent control for steering, and the hydraulic cylinder directly controls the lifting to design the mobile platform of kiwifruit picking robot. The ADAMS software was used to simulate the kinematics of the designed mobile platform. The results show that the designed mobile platform structure can meet the reliability and stability requirements of the translation and rotation working conditions no matter it is loaded or not.
Keywords: kiwifruit picking; mobile platform; structural design; kinematics simulation
目前應用于农业采摘类的智能机械与工业类、制造业等其它类型的智能机械的移动平台有很大区别,农业采摘机器人的工作环境有很多不确定因素,是复杂多变的地皮表面,分布着很多杂草和沙石,这使农业机器人在控制和设计方面的难度更大。国内外学者在此领域做出了很多研究,也取得了较为丰富的成果[1-5]。
1 移动平台总体结构设计
用于农业的机器人在农田、山地等这类较为复杂的环境中工作时须具备以下几个特点:在工作过程中行驶动力足够大能在一定的坡度地面工作;机器人的结构要紧凑,这样才能在复杂的地面上完成精确的采摘工作;转弯要灵活,方便调整机器位置;工作稳定性要好,这样才能达到更好的采摘效果。
猕猴桃果树是藤蔓型的,果树不能直立生长,因此猕猴桃果树是依靠缠绕在周边的其它植被和通过人工搭建的棚架上生长的。人工搭建的棚架相邻两个钢制支撑杆之间的间隔约为6m左右,顺着种植的行列每隔50-60mm左右设有一条钢丝,棚架在竖直方向上架杆之间的距离在3m左右,棚架之间的间距在4m左右,棚架高度大概为1.8m,果实分布在棚架上的平均分布高度在1.5-1.7m左右[6]。
结合猕猴桃种植的基本参数,设计移动平台左右轮距为1200mm,前后两轴距为2000mm。每个车轮都应用轮毂电机来为平台提供动力,每一个轮毂电机都能够独立的进行控制,并由四个独立控制的转向机构通过转向电机提供动力来改变车轮方向,再通过控制轮毂电机的转速大小来控制移动平台在小面积内的转弯和原地旋转。为了使移动平台能在复杂多变的地面上正常的进行工作,该移动平台运用四个液压缸来直接对平台的水平进行调节,从而能实现在一定坡度范围内对猕猴桃进行采摘,并且直接运用液压调节平衡,可在原始移动平台的基础上进一步减小平台尺寸并增大平台利用率。设计完成的三维模型如图1所示。
2 移动平台运动学仿真分析
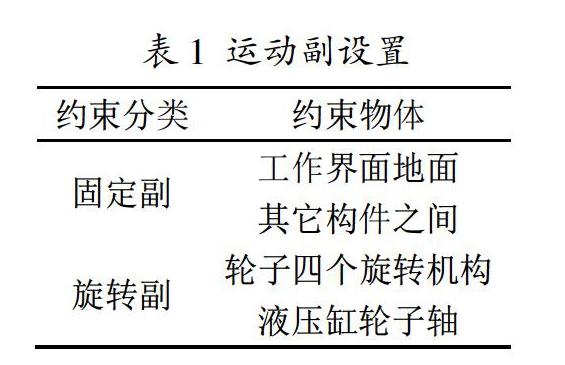
为了验证移动平台在实际工作环境下满载时和空载时的运动性能,采用ADAMS虚拟样机软件对移动平台进行运动学仿真分析。为便于仿真计算,将操控台、蓄电瓶以及一些标准件转换成载荷施加给移动平台。首先,将solidworks建模完成的三维模型以X-T的格式保存后导入ADAMS中;其次,将移动平台简化后的三维模型与 ADAMS中的地面模块进行连接,把地面模块当做移动平台的工作平面;然后,将模型的单位与ADAMS统一,并在零部件相应的位置上添加运动副和转动副以及添加平台需要承受的载荷;最后,将其他没有约束的零部件进行固定,使添加了固定副的零部件与平台构成一个整体。各种约束的设置如表1所示。载荷设置主要针对空载和满载两种情况,其中空载时只有移动平台自重674.5kg,满载时还需在平台上加载125.5kg。
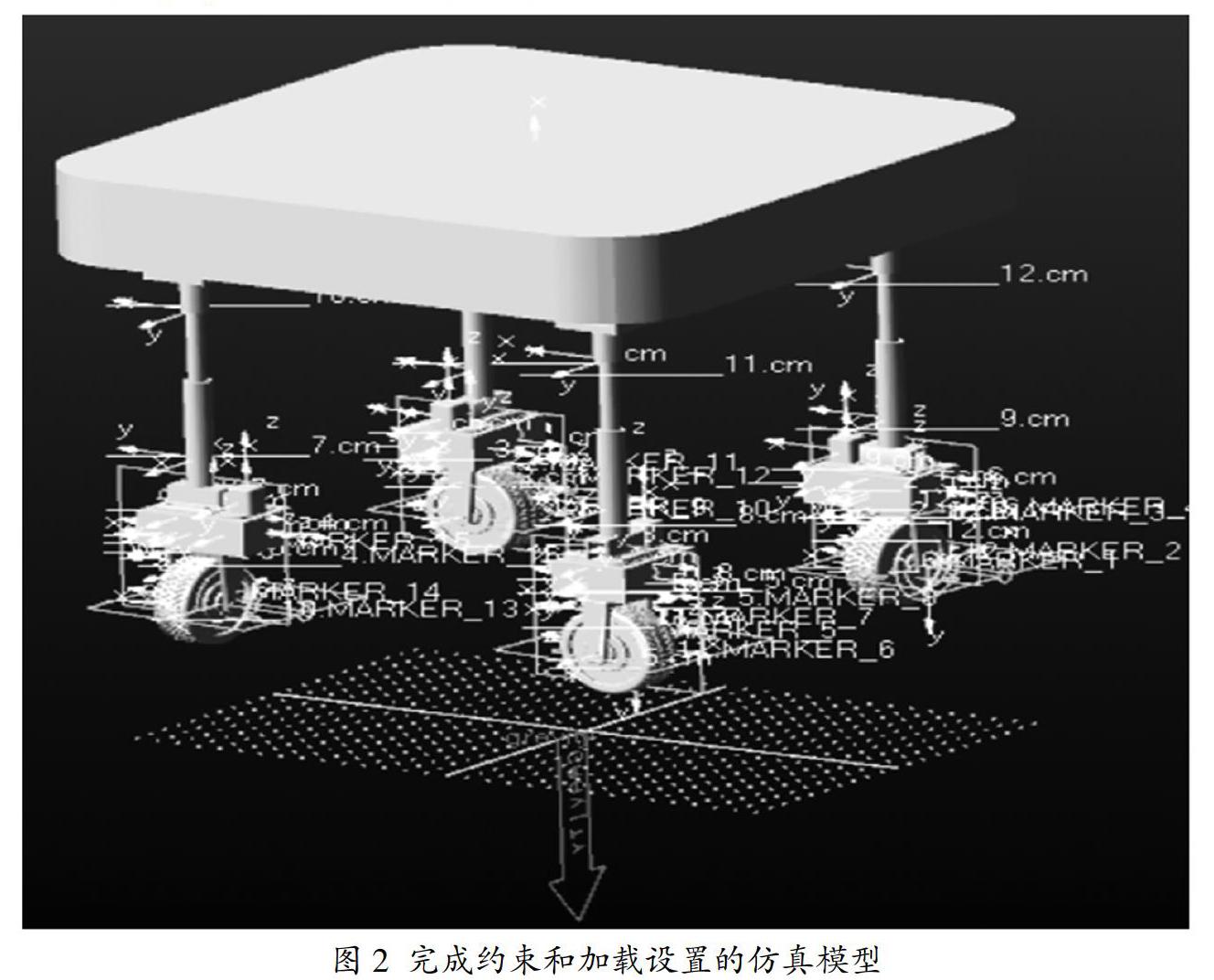
完成所有设置后的移动平台仿真模型如图2所示,通过对轮毂电机加载不同的驱动值即可进行仿真分析。
2.1 沿X、Y方向平动的运动学仿真
通过调整转向电机,可使轮子沿X或Y方向运动,故二者的运动规律是一致的,仅需分析其中一种情况即可。以沿X向平动为代表,当?棕1=?棕3=?棕2=?棕4时,移动平台在Y轴方向上是处于静止的,移动平台沿X轴方向横向移动。当角速度大小为?棕1=?棕3=?棕2=?棕4=?仔/3rad/s时,移动平台向X轴的正方向移动;当角速度大小为?棕1=?棕3=?棕2=?棕4=-?仔/3rad/s时,向X轴的负方向移动,由此得到X方向直行的理论速度VX约为150mm/s,经过10s后理论位移约为1500mm。
图3中所示为仿真计算得到的移动平台在空载和满载条件下工作时平台中心在X方向的位移曲线,从图中可以看出移动平台的位移情况呈线性,且在经过10s后的运行位移均约为1500mm。因此可知移动平台空载和满载对横移时的位移无影响。
图4为移动平台在空载和满载条件下工作时平台中心在X方向上的速度曲线,从图中可看出移动平台的速度稳定在155mm/s左右波动,但在满载情况下移动平台的瞬时启动速度大于空载,这是因为移动平台承受载荷变大,移动平台与地面之间的最大静摩擦力也随之变大,在启动过程中需要的牵引力就会变大。
图5为移动平台在空载和满载条件下工作时移动平台中点在竖直方向的振动情况,从图中可看出移动平台在空载和满载条件下振动幅值基本一致,但是在满载条件下的振动中心相对较低,其原因是由于平台载重的增加。
2.2 沿Z轴旋转的运动仿真
要使移动平台沿Z轴方向在原地自旋,调整转向机构方向,使1、3轮相对,2、4轮相对,令?棕1=?棕2=-?棕3=-?棕4=?仔/3rad/s,图6为移动平台在空载和满载条件下工作时平台原地旋转一周时平台质心的轨迹曲线图。从图中可以看出,移动平台无论是在空载条件下还是满载条件下原地旋转一周,质心在X轴和Y轴方向上的位移曲线都没有明显的差别,且在X向和Y向上的最大幅值均分别为3.87mm和4.33mm,说明平台承载对于旋转运动产生的位移没有影响,且该移动平台能够实现在小面积内原地旋转的工作方式。
图7为移动平台在空载和满载条件下工作時平台顺时针自旋角速度曲线图,从图中可以看出移动平台在空载和满载条件下运行时自旋角速度的大小均在10.5°/s左右波动,说明平台是否载重对平台的自旋角速度无明显影响。
图8为移动平台在空载和满载条件下工作时,移动平台在竖直方向上的振动情况,从图中可以看出移动平台无论是否载重其振动幅值均在0.4mm左右波动,从图中可看出移动平台在空载和满载条件下自旋产生的振动幅值一致,且幅值中值均维持在0.4mm的低值,说明该平台在自旋过程中不会出现明显的振动。
3 结论
本文针对猕猴桃的果树生长特点、种植方式和环境因素等多种条件,对应用于猕猴桃采摘机器人的移动平台进行了总体结构设计,并应用ADAMS软件对移动平台进行了运动学仿真。分析结果表明设计完成的移动平台结构无论在空载还是满载情况下均能够满足平动及转动工作状态下的可靠性和平稳性要求。
参考文献:
[1]Bak T, Jakobsen H. Agricultural Robotic Platform with Four Wheel Steering for Weed Detection[J]. Biosystems engineering, 2004,87(2):125-136.
[2]Nishina, Hiroshige. Development of Speaking Plant Approach Technique for Intelligent Greenhouse[J]. Agriculture & Agricultural Science Procedia, 2015,3:9-13.
[3]N Kondo, M Monta, T Fujiura. Fruit harvesting robots in Japan[J]. Advances in Space Research the Official Journal of the Committee on Space Research, 1996,18(1-2):181-184.
[4]董芒.水果采摘机器人移动平台的设计与试验[D].南京农业大学,2016.
[5]纪超,冯青春,袁挺,等.温室黄瓜采摘机器人系统研制及性能分析[J].机器人,2011,33(06):726-730.
[6]陈子啸.猕猴桃采摘机器人移动平台的设计与仿真[D].西北农林科技大学,2016.
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
办公室业务(2016年12期)2017-01-09
科技创新与应用(2016年34期)2016-12-23
中国教育技术装备(2016年20期)2016-12-12
知音励志·社科版(2016年8期)2016-11-05