基于二阶滑模控制的虚拟发电厂分层协同无功电压控制策略
2020-11-18 08:09陈旗展张喜平阮志杰周哲民
可再生能源 2020年11期
陈旗展, 张喜平, 阮志杰, 刘 劲, 周哲民
(1.广东电网有限责任公司中山供电局, 广东 中山 528400; 2.清华大学 电机工程与应用电子技术系, 北京100084)
0 引言
随着分布式发电并网数量和容量的急剧上升, 可再生能源的并网管理难度和复杂度不断增加,虚拟发电厂已经成为应对这种局面的有效技术[1],[2]。虚拟发电厂将不同形式的可再生能源统一为一个模块,并辅之以必要的调峰设备、监测保护装置、能量管理系统以及需求侧管理手段等智能模块进行管理,能够有效降低分布式发电并网对电力系统的冲击[3]~[5]。虚拟发电厂须要进行电压稳定控制,以维持并网点的电压稳定性。
目前,已有较多文献针对包括微电网、配电网以及分布式发电模块在内的小型供用电系统进行了电压稳定控制研究。文献[6]针对风电场的并网电压控制问题,所建立的模型考虑到了无功的时空分布特性。文献[7]基于多代理系统建立了主动配电网分布式电压控制策略,该策略基于分布式计算实现了网络中各个节点的电压最优,同时最大化可再生能源的消纳率。文献[8]针对负荷侧的电压,通过对无功就地补偿设备制定合理的调节策略进行电压控制,能够维持负荷侧的电压稳定。文献[9]分析了大规模的分布式光伏集群并网接入电力系统后,对系统的电压分布和稳定性的影响。在此基础上,文献[10]提出了采用光伏逆变器调节并基于自适应控制的分布式并网光伏电压控制策略, 能够有效应对光照强度的波动性。 文献[11]采用多智能体理论实现了配电网和虚拟发电厂的协同电压控制, 但没有充分发掘虚拟发电厂内部的无功电压调节资源。 虚拟发电厂的电压随着负荷水平、 系统无功消耗水平不断产生波动,当电压波动时,虚拟发电厂可以通过调用系统内多种DG 逆变器的资源进行无功补偿,维持电压稳定。 然而,目前还很少有文献针对虚拟发电厂采用滑模控制建立其电压控制模型。
本文针对含分布式发电并网的虚拟发电厂电压控制问题, 基于二阶滑模控制建立虚拟发电厂分层协同无功电压控制策略。 首先基于DG 逆变器的下垂特性, 通过上层控制模块对无功调节量进行分配; 然后通过下层控制模块制定各个DG逆变器的二阶滑模控制的等效控制策略; 最后通过算例, 验证了所建立的控制策略对虚拟发电厂电压控制的效果。
1 虚拟发电厂上层无功调节功率分配策略
1.1 DG 逆变器无功补偿调节原理

图1 DG 逆变器并网等值电路Fig.1 Grid connection equivalent circuit of DG inverter
虚拟发电厂中具备无功调节能力的逆变器并网等值电路如图1 所示。图中:Ui为逆变器输出电压;UPCC为DG 并网点电压;ai为相角差;xi为逆变器电感;Pi和Qi分别为DG 逆变器的有功和无功出力。
通过并网点的潮流方程得到:
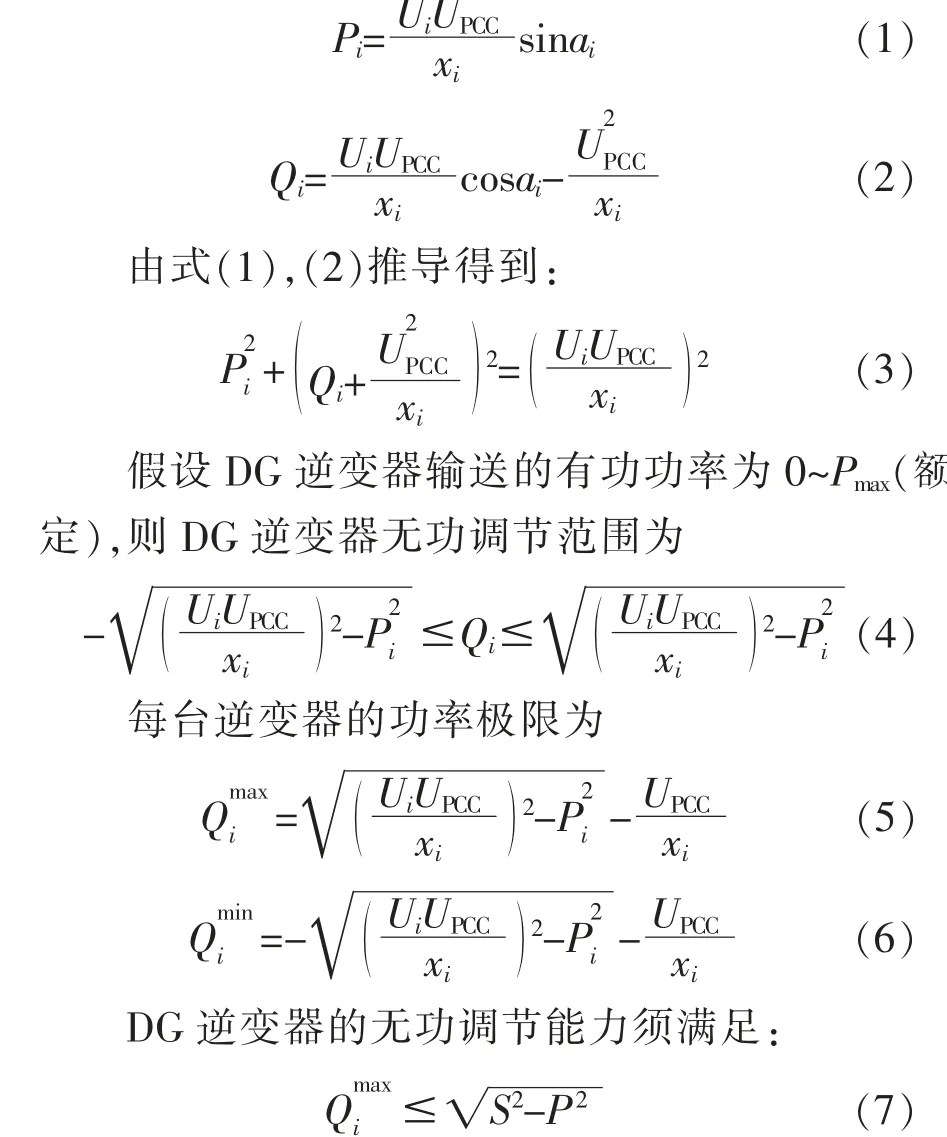
式中:S 为并网视在功率;P 为并网有功功率。
1.2 基于下垂特性的DG 逆变器无功调节量分配
在基于dq 坐标系同步PI 控制策略的基础上,本文引入含下垂特性的电压控制环,实现了逆变器无功电流按实际容量合理分配, 具体控制框图如图2 所示。

图2 含下垂特性的DG 逆变器电压控制环控制框图Fig.2 Control block diagram of voltage control loop of DG inverter with droop characteristics

式中:ΔV为电压变化量;ΔVq为基准电压。
为了保证负载变化时各DG 逆变器无功出力的合理分配, 下垂系数取值应与实时可输出最大无功电流成反比[12]。

下垂系数特性如图3 所示, 其中Δiq2和Δiq1分别为两种下垂特性下的逆变器输出无功电流调节量,Δiq2>Δiq1。
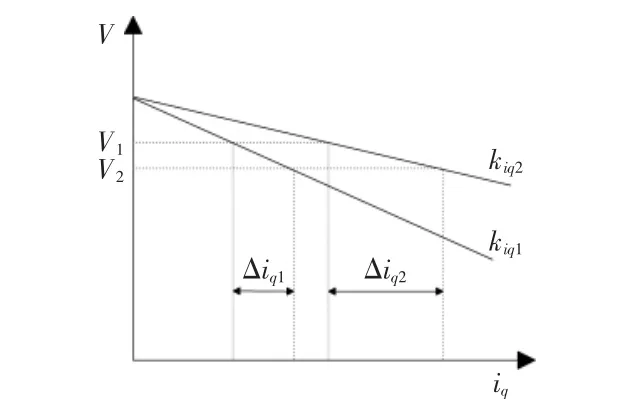
图3 DG 逆变器无功调节功率分配下垂系数特性示意图Fig.3 Droop characteristics of reactive power distribution of DG inverter
2 下层DG 逆变器无功出力滑模控制
2.1 DG 逆变器二阶滑模控制
滑模控制是一种特殊的变结构控制, 其控制系统“结构”能够跟随DG 系统运行状态的改变而改变[13],[14]。滑模控制的滑动特性是能够设计的,并且在设计过程中不需要系统参数, 具有很强的鲁棒性,调节速度快。
通过非线性系统对虚拟发电厂进行建模,如下所示:

式中:x˙(t)∈Rn和u∈Rm分别为系统的状态变量与控制输入;f(t,x)∈Rn,g(t,x)∈Rn×m。
控制输入u 的切换逻辑可表示为

式中:u+(t,x) 为正向控制量;u-(t,x) 为负向控制量;S(t,x)为滑模面函数。 以上3 个函数均为光滑连续函数。
滑模控制输入u 为

式中:ueq为等效控制变量, 当滑模面函数的一阶导数S˙=0,二阶导数S¨≠0 时,滑模面函数S 的相对阶为1,ueq由S˙=0 获得;当S˙=0,S¨=0,三阶导数S...≠0 时,S 的相对阶为2,ueq由S¨=0 获得。
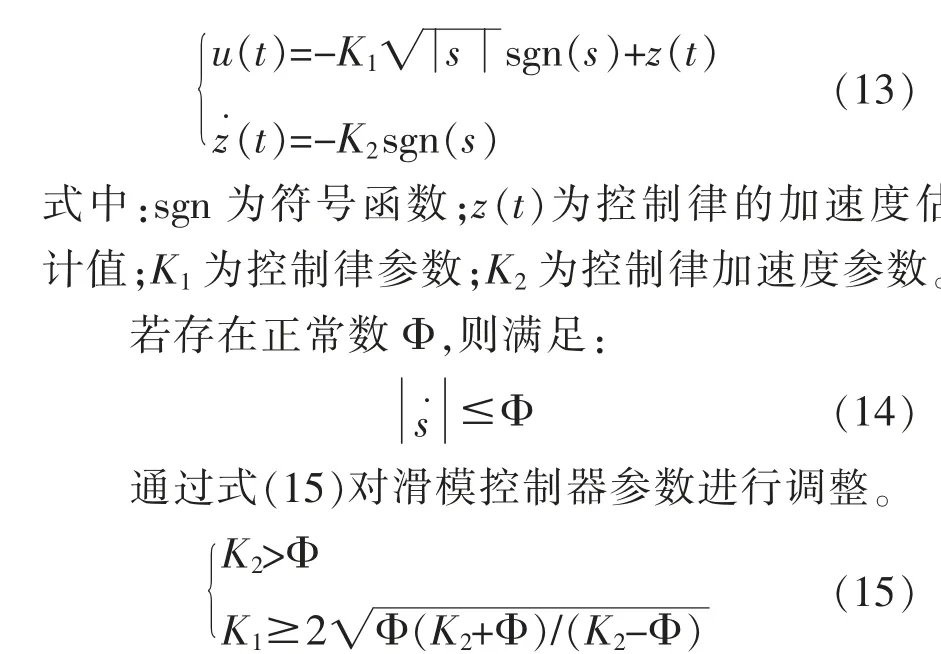
本文使用二阶滑模控制来设计Δu,该策略只需要滑模面的信息, 并且在滑模面的相对阶为1时就可以直接使用,该算法具体可表示为。
2.2 滑模面的确定
滑模控制的目标是使并网换流器的输出电流在滑模面上运动。 定义跟踪误差为

滑模控制的滑模面可表示为式(17),其中的元素如式(18)所示。 引入积分项可以消除DG 逆变器系统的静态误差, 并能够提高系统的响应速度。

式中:Kα,Kβ分别为DG 逆变器系统α,β 轴的积分系数,均为正实数。
2.3 DG 逆变器控制策略
滑模控制器的控制变量为并网逆变器的输出电压,表示为
式 中:ΔUcα,ΔUcβ分 别 为α,β 轴 的 开 关 控 制;Ucα_eq,Ucβ_eq分别为α,β 轴的等效控制输出。

式中:Fα和Fβ分别为滑膜面函数的α,β 轴基准分量;L1为逆变器电感系数;Kα和Kβ分别为α,β 轴误差增益系数;eα和eβ分别为α,β 轴误差。
由式(24),(25)得到:

3 仿真算例
为了验证所建立的模型对虚拟发电厂电压控制的有效性,在Matlab/Simulink 仿真平台上搭建如图4 所示的虚拟发电厂系统进行仿真。 该虚拟发电厂额定电压为380 V, 系统中并网接入了多种分布式发电设备, 包括微燃机(Microturbine,MT)、 燃料电池 (Fuel Cell, FC)、 分布式风电(Wind Turbine, WT)、 分布式光伏(Photovoltaic Cell, PV)、分布式储能(Energy Storage, ESS)和并网负荷。 其中,光伏逆变器和储能逆变器在系统电压波动时进行无功补偿调节,其余分布式发电设备不参与调节。

图4 虚拟发电厂网架结构图Fig.4 Grid structure of virtual power plant
分布式光伏和储能设备的参数如表1 所示。二阶滑模控制模型中的参数如表2 所示。

表2 滑模控制器参数Table 2 Parameters of sliding mode controller
为了验证本文所建立的模型相比于传统控制策略的优势, 采用两种方式对同一个虚拟发电厂以及电压控制场景进行控制,其中:场景一的下层模型为采用传统的PI 控制,上层按照逆变器容量比进行无功调节量分配; 场景二为采用本文基于二阶滑模的分层协同控制策略。 当虚拟发电厂中发生无功负荷变化、变压器档位变化、无功补偿设备运行变化时, 会导致系统无功功率增加或者减少。 假设虚拟发电厂运行在t=0 s 时,系统无功功率出力和负荷均为14.67 MVar; 当运行到t=1.0 s时, 系统因为负荷特性的变化产生了初始电压正偏差0.03 p.u;当运行到t=2.0 s 时,系统又一次因为负荷特性的变化产生了初始电压负偏差0.06 p.u。在秒级尺度的时间内能够对虚拟发电厂电压产生波动的只有负荷波动, 因此不考虑光照强度的影响。
在场景一下可以得到虚拟发电厂运行期间分布式光伏和储能逆变器的无功调节量分配以及系统运行期间虚拟发电厂母线电压水平, 分别如图5,6 所示。

图5 场景一分布式光伏和储能逆变器的无功调节量分配Fig.5 Distribution of reactive power regulation of scenario I distributed photovoltaic and energy storage inverter
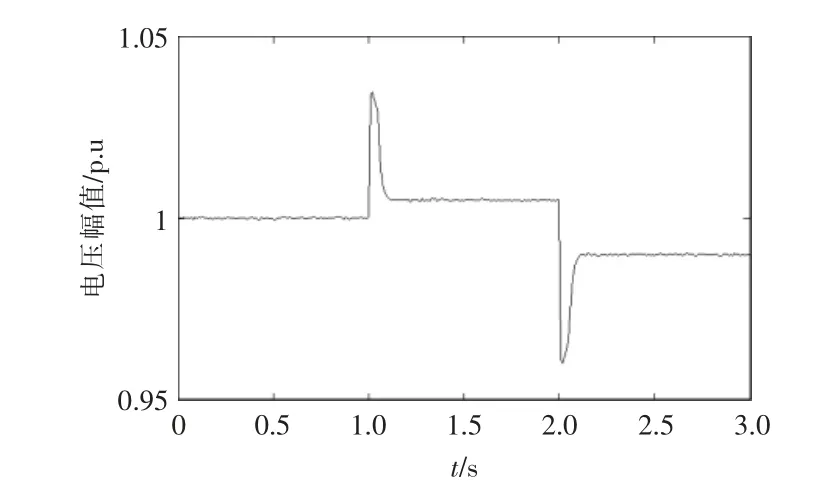
图6 场景一虚拟发电厂运行期间母线电压水平变化Fig.6 Bus voltage level change during operation of scenario I virtual power plant
从图5 和图6 可以看出,在场景一下,由于分布式光伏和储能逆变器对无功调节量简单地采用容量比例进行分配,使得下垂系数更大,即调节响应速度更快的逆变器无法充分发挥调节作用,因此光伏和储能的无功调节出力响应较慢。 在电压曲线上,由于PI 是有差调节,因此图6 中仅依靠光伏和储能逆变器的PI 调节并不能使电压恢复到初始状态,还需要其他电压控制手段进行恢复。
同理, 在场景二下可以得到虚拟发电厂运行期间分布式光伏和储能逆变器的无功调节量分配以及系统运行期间虚拟发电厂母线电压水平,分别如图7,8 所示。

图7 场景二分布式光伏和储能逆变器的无功调节量分配Fig.7 Distribution of reactive power regulation of scenario II distributed photovoltaic and energy storage inverter

图8 场景二虚拟发电厂运行期间母线电压水平变化Fig.8 Bus voltage level change during operation of scenario II virtual power plant
从图7 和图8 可以看出,在场景二下,由于分布式光伏和储能逆变器对无功调节量的分配依据上层控制模块的下垂特性, 因此使得下垂系数更大, 即调节响应速度更快的逆变器可以分配到更大的调节容量,充分发挥其调节特性。下层控制模块采用二阶滑模控制作为误差调节, 在光伏和储能逆变器无功调节后, 系统电压水平恢复到了初始状态,具备更优的电压稳定性。两种场景下电压控制指标对比如表3 所示。
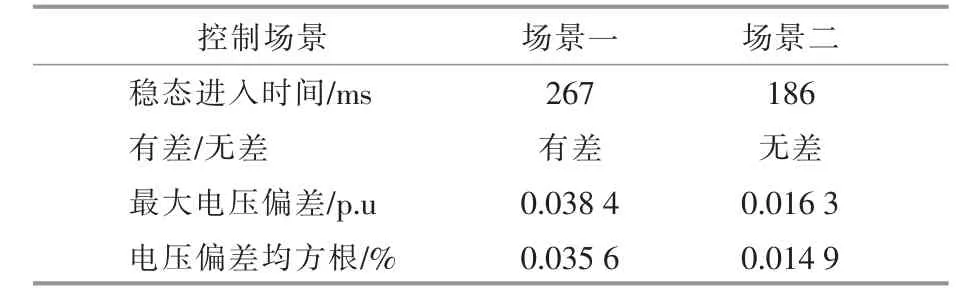
表3 两种场景下无功电压控制指标对比Table 3 Comparison of reactive power and voltage control indexes in two scenarios
从表3 中可以看出: 相比于传统的PI 控制,基于二阶滑模控制的分层协同电压控制策略将稳态进入时间从267 ms 减少为186 ms; 将最大电压偏差从0.038 4 p.u 降低为0.016 3 p.u,下降幅度为57.55%;电压偏差均方根从0.035 6%降低为0.014 9%,降低程度为0.020 7 个百分点。
4 结论
本文针对含分布式发电并网的虚拟发电厂电压控制问题, 基于二阶滑模控制建立了虚拟发电厂分层协同无功电压控制策略。仿真算例表明:本文建立的虚拟发电厂分层协同无功电压控制策略能够依据下垂特性将电压波动期间无功调节量合理分配给不同的DG 逆变器, 充分发挥DG 逆变器的响应特性;相比于传统的PI 控制,二阶滑模控制能够降低响应速度, 在减少DG 逆变器无功调节幅度的同时无差地恢复电压初始水平。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
中等数学(2021年9期)2021-11-22
疯狂英语·初中天地(2021年4期)2021-06-09
疯狂英语·初中天地(2021年3期)2021-05-21
防爆电机(2020年4期)2020-12-14
数学学习与研究(2017年20期)2018-01-02
北京航空航天大学学报(2017年4期)2017-11-23