
基于自适应UKF的锂离子动力电池状态联合估计
2020-11-18 11:24章军辉陈大鹏
东北大学学报(自然科学版) 2020年11期
章军辉, 李 庆, 陈大鹏, 赵 野
(1. 中国科学院 微电子研究所,北京 100029;2. 江苏物联网研究发展中心,江苏 无锡 214135;3. 无锡物联网创新中心有限公司,江苏 无锡 214135)
锂离子动力电池作为新能源电动汽车的重要供能来源,准确估计其荷电状态(state of charge,SOC)[ 1-3]、健康状态(state of health,SOH)[4-5],能够有效预估汽车可行驶里程,充分合理利用电池,延长电池使用寿命以及提高整车运行效率,对加快汽车电动化进程具有重要实际意义.
目前,电池SOC估计方法主要有:①安时积分(ampere-hour counting, AH)法[6],存在累计误差、SOC初值校准的问题;②开路电压(open circuit voltage, OCV)法[7],需要长时间静置,不适用于工作中的电池状态估计;③神经网络法[8],对数据集的依赖性较强,且算法的抗扰动能力不足;④基于扩展卡尔曼滤波(extended Kalman filter, EKF) 进行状态估计[9],EKF通过对系统非线性函数进行一阶Taylor展开,再用卡尔曼滤波(KF)公式对目标的状态作最优估计,而对于强非线性系统来说,EKF滤波性能极不稳定,甚至发散,此外Jacobian矩阵计算复杂易出错;⑤基于无迹卡尔曼滤波(unscented Kalman filter, UKF)进行状态估计[10],UKF采用一系列确定样本来近似系统状态的后验概率密度分布,能够有效解决由系统非线性加剧而引起的滤波发散问题,但其估计精度仍然受到电池等效模型准确性的影响;⑥基于粒子滤波(particle filter, PF)进行状态估计[11],PF采用大量粒子来近似系统状态的后验概率密度分布,适用于强非线性、非高斯系统,但存在计算负荷重、粒子退化等问题.
电池SOH 表示电池的老化程度,主要表现为:电池的欧姆内阻增大,电池的当前最大可用容量降低,电池的能量密度与功率密度降低.目前,电池SOH估计方法主要有:①内阻法[12],对于毫欧级的内阻来说,量测难度较大;②电化学阻抗法[13],常用于实验室分析电池健康状态;③数学模型法[9-10,14],电池系统的非线性以及环境的不确定性,将影响数学建模的准确性,进而影响到估计精度;④基于数据驱动的预测[15],如支持向量机(support vector machine, SVM)、粒子滤波等,该类方法不需要对象系统的机理知识,通过数据挖掘来预测其中的隐含信息,以解决模型失配的问题,然而,因通常所采集数据的有限性、不确定性,也导致该方法在工程实施时具有一定的局限性.
KF,EKF,UKF等滤波算法中,通常是假设过程噪声和量测噪声服从预设的正态分布,而实际上若噪声的统计特性参数估计不准确的话,可能会导致滤波结果发散.为改善电池状态估计精度、估计算法的自适应容错性等实用化问题,本文发展了一种自适应UKF的电池状态联合估计算法.首先构建电池等效模型的状态空间方程;其次基于UKF框架在线滚动估计电池SOC、电池等效模型的欧姆内阻,在无迹变换(UT)时对量测方程进行准线性化处理,同时在循环迭代过程中实时更新高斯噪声的统计特性参数;接着设计了一种电池状态联合估计策略,实时跟踪并对电池等效模型参数进行在线更新,解决了模型参数时变的问题;最后对该算法的估计效果进行了验证与探讨.
1 电池等效模型
锂离子动力电池的一阶等效模型如图1所示,图中:Re为电池的欧姆内阻;Rc为电池的极化内阻;C为电池的极化电容;It为电池的放电电流;Uo,t为电池两端的观测电压;Et为电池的平衡电动势(balanced electro-motive force,B-EMF).
根据图1所示的电池模型,有
(1)
Et=ReIt+Uc,t+Uo,t.
(2)
式中:Uc,t为电池极化内阻上产生的压降;τ=RcC为时间常数.
电池SOC的安时积分法[6]定义为
(3)
式中:St0为电池t0时刻的荷电状态;Q0为电池的标称容量;η为充放电效率.
1.1 电池SOC的数学描述
令x1(k)=[S(k),Uc(k)]T作为状态向量;y1(k)=Uo(k)作为系统输出;u(k)作为控制输入;w(k),v(k)作为系统扰动;Ts为采样周期.根据式(1)~式(3),建立以x1(k)为状态向量的离散状态空间方程:
(4)
式中:u(k)=I(k);w(k)=[w1(k),w2(k)]T为过程噪声;v(k)为观测噪声,各系数矩阵满足:
其中,Et=f{S(k)}表示电池的平衡电动势Et与电池荷电状态SOC之间的映射关系,该关系会受温度、电池老化程度等因素的影响.电池SOC状态空间模型中,欧姆内阻、极化内阻是事先已辨识的.
1.2 电池SOH的数学描述
电池SOH可以通过电池的欧姆内阻来间接衡量[16].将电池的荷电状态、极化电压视为已知量,建立关系式:
Re,t+1=Re,t+rt,
(5)
Et=Re,tIt+Uc,t+Uo,t.
(6)
式中,rt为过程噪声.
令x2(k)=Re(k)作为状态变量,进而建立以x2(k)为状态变量的离散状态空间方程:
(7)
式中,q(k)为观测噪声,各系数满足:
E=-I(k),
F=f{S(k)}-Uc(k).
2 电池状态估计
2.1 基于自适应UKF框架的SOC估计
2.1.1 自适应UKF算法
式(4)所示的状态空间模型是非线性的,考虑到EKF存在线性化误差较大、滤波不稳定等问题,本文采用UKF来处理非线性估计问题.UKF采用UT来近似非线性模型,即通过某种计算规则构造出Sigma点集来间接逼近非线性系统的状态分布,能够有效避免由系统非线性加剧而引起的滤波发散问题.
为了降低UKF的计算开销,UT变换时对量测方程进行准线性化处理,以降低循环迭代过程中的计算负荷;为了提高UKF估计算法的自适应容错能力,在迭代过程中,不断更新过程噪声的统计特性参数以减少状态估计误差.
具体算法设计:
1) UT变换.
①构造Sigma点集{Xi}:
(8)
不难发现,Sigma点集{Xi}是由2N+1维列向量构成的.为了更好地逼近系统状态分布的集中趋势,对Sigma点集{Xi}进行权值设计[10]:
(9)
式中:i∈(1,2N);α用来确定Sigma点集的分布,取值范围为(10-4, 1);β反映系统状态的分布情况,当系统状态为高斯分布时,取值为2;λ=α2(N+k)-N,影响逼近精度,其中,参数k可调,通常取0.
②对Sigma点集进行非线性变换.
如图2所示,对Sigma点集进行非线性变换:
(10)
式中,f{·},h{·}分别反映式(4)所示模型中输入对状态转移、状态转移对输出的影响.
这里对h{·}进行准线性化处理,即把Et=f{S(k)}函数关系式转换成电动势与电池SOC的一一映射表,再通过查表的方法来减少迭代过程中的计算量.
2) 一步迭代算式.
令过程噪声w(k)服从N(0,Q)分布,观测噪声v(k)服从N(0,R)分布.
①时间更新.
(11)
②量测更新.
(12)

③过程噪声特性更新.
不准确的噪声统计特性往往会引起滤波结果发散,基于最大后验估计(maximum a posteriori, MAP)的Sage-Husa自适应滤波器能够较好地估计出噪声的一阶矩与二阶矩,其原理清晰、计算简单,在工程实际中被广泛应用.
采用Sage-Husa估计方法对过程噪声的方差Q进行在线估计,同时引入遗忘因子以降低历史数据的影响.
(13)
2.1.2 收敛性判断
Sage-Husa估计器是一种次优的无偏估计,用一步预测来估计噪声的统计特性,容易导致噪声二阶矩失去正定性或半正定性,从而引起滤波发散.反观式(13),在估计噪声二阶矩时,式中存在减法运算,故在滤波过程中难以保证二阶矩的非负定性.
为了避免由误差协方差矩阵负定而导致滤波结果发散的风险,迭代过程中需对滤波结果的收敛性进行判断.
(14)
式中:trace{·}为求迹运算;γ为可调系数且γ≥1.
上述UKF迭代过程中,若如式(14)所示的判据不成立,则修正Px:
(15)
2.2 基于自适应UKF框架的SOH估计
电池欧姆内阻能够间接表征电池的SOH健康状态,而电池欧姆内阻会受电池SOC、温度、电池老化程度等因素的影响.为了提高电池等效模型的准确性以及动态反映电池SOH的能力,有必要对电池欧姆内阻进行实时估算.
与SOC估计类似,仅需将式(4)所示模型换成式(7)所示模型,即可实现电池欧姆内阻的在线滚动估计.
由于电池SOH随着电池内阻的增大而逐渐衰减,故可据此特性对电池SOH进行间接量化,其数学描述[17]为
(16)
式中:REOL为电池寿命终结时的内阻值;R0为电池出厂时的内阻值;Re为在线辨识的内阻值.
此外,电池老化的另一种表现为电池当前最大可用容量的降低,故亦可据此特性对电池SOH进行间接量化,其数学描述[18]为
(17)
式中:Qpresent为当前电池最大可用容量;Q0为电池出厂时的额定容量.
2.3 电池状态联合估计策略
基于一阶RC网络对电池SOC估计时,假设模型参数Re是事先已辨识的,在实际工程中,考虑到电池老化等因素的影响,有必要对模型参数进行在线更新,以保证电池SOC的估计精度.为此,设计了一种联合在线估计算法,如图3所示.
该算法充分考虑了电池状态之间紧密的内在关联性,能够较好地适用于动态工况,主要步骤如下:
步骤 1 模型参数初始化;
步骤 2 基于SOH状态空间模型,采用UKF框架,在线估计电池欧姆内阻;
步骤 3 基于SOC状态空间模型,采用UKF框架,在线估计电池SOC、极化参数;
步骤 4 根据步骤2中辨识得到的欧姆内阻更新步骤3中UKF迭代过程中的内阻参数,而步骤3中估计得到的电池状态参数又将进一步修正步骤2中的模型参数.
此外,电池老化、工作环境等因素会影响到SOC与OCV的映射关系,因此,在实际应用时,可通过实验方法拟合出不同条件下的OCV_SOC曲线,进而对应查表以期改善状态估计效果.
3 仿真验证
本文的实验对象为合肥国轩公司的一个内含12串单体的电池包.要想获取电池的平衡电动势,必须在电池内部处于平衡状态时来量测电池的端电压.这里,浅放-静置实验条件为:环境温度为25 ℃,单体标称容量为30 Ah,充放电效率为0.95,放电倍率为0.6 C,放电电流为18 A,放电时长为1 min,静置时长为30 min.
通过浅放-静置实验,对一阶RC网络模型参数进行辨识,模型参数初值见表1.
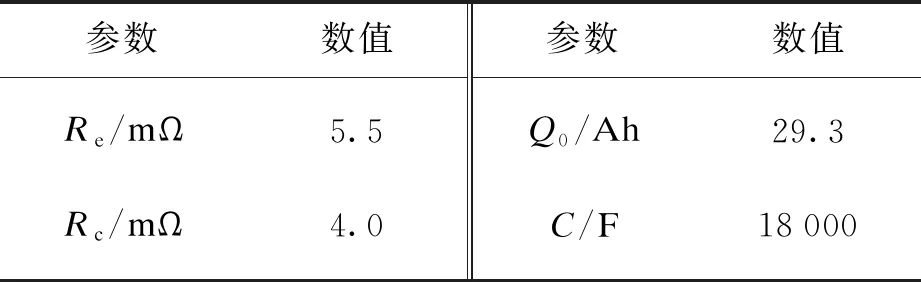
表1 基于一阶RC网络的模型参数
此外,该实验条件下,电池平衡电动势与SOC之间的拟合曲线如图4所示.
考虑到老化、温度等内在和外在因素的影响,工程实施时需尽可能多地拟合出不同条件下的OCV_SOC映射表.
本文设计的自适应联合估计方法记为JUKF(joint estimation based on UKF)估计,对比实验如下.
3.1 JUKF与UKF估计对比
文献[4]表明,锂离子电池的欧姆内阻受温度、电池SOC的影响,当温度或电池SOC较高时,电池活性增强,欧姆内阻较小,反之亦然.
实验条件:
1) 采用恒流放电工况,采样周期为60 s;
2) 放电实验过程中,同时将恒温箱温度由25 ℃缓慢升至30 ℃.
将本文设计的JUKF估计与UKF估计[10]方法进行对比,仿真结果如图5所示.
通过实验得出,JUKF估计精度较高,最大误差约为1%,而UKF估计的最大误差约为3%,即JUKF能够较好地适应电池模型参数的时变特性,估计效果要优于UKF.
3.2 曲线收敛性对比
实验条件:
1) 常温下进行恒流放电,采样周期为30 s;
2) SOC真实值为92%,而初值标定为99%.
通过实验得出,在SOC初值标定不准的情况下,采用AH估计的曲线始终不能收敛于期望轨迹,这是由于AH法是开环估计,缺少反馈校正网络所导致的,而采用JUKF估计解决了AH估计因SOC初值标定不准而导致曲线无法收敛的问题.
3.3 内阻估计
实验条件:常温下进行恒流放电,采样周期为30 s.
如图7所示,内阻初值标定分别为5,7 mΩ时,经过JUKF迭代运算,两条估计曲线趋于一致,即内阻估计结果受初始取值的影响不明显.此外,开始阶段,由于电池放电过程中会产生热量,内阻阻值有略微减小过程,而随着电池SOC降低,内阻阻值呈增大趋势.
3.4 计算复杂度对比
实验条件:
1) 上位机配置参数为1.3 Hz主频、四核、4 GB内存,仿真软件采用Matlab2015;
2) 分别采用OCV_SOC映射表、四阶拟合曲线的方法来表示量测方程;
3) UKF迭代步数为100步,且重复实验次数为50次.
上述实验环境下,完成100步迭代,采用OCV_SOC映射表的方法,平均时间开销约为108.6 ms,四阶拟合曲线的多项式系数向量为[-3.255 9, 8.06,-7.118,2.760 3,2.851 8],采用该方法的平均时间开销约为121.1ms,即文中采用准线性化处理的方法能够在一定程度上降低UKF迭代过程中的计算负荷.
4 结 论
1) JUKF估计充分考虑了电池SOC、内阻之间紧密的内在关联性,其估计效果优于UKF,能够较好地适应电池模型参数的时变特性.
2) 相比标准UKF,JUKF对量测方程进行了准线性化处理,降低了循环迭代过程中的计算开销;采用带遗忘因子的Sage-Husa自适应估计方法对过程噪声的统计特性参数进行递推估计与修正,提高了UKF估计算法的自适应容错能力;同时实时跟踪滤波的收敛性,若呈发散趋势时,通过自适应衰减因子对误差协方差进行惩罚以抑制滤波发散,从而保证了滤波过程的数值稳定性.
3) JUKF估计解决了工程上AH开环估计不能收敛的问题,为电池SOC在线校正提供了一种研究思路与方法.
猜你喜欢
物理之友(2022年1期)2022-04-19
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
劳动保护(2019年3期)2019-05-16
科技视界(2018年3期)2018-04-02
中学物理·高中(2016年12期)2017-04-22
饮食科学(2016年7期)2016-07-27
中学物理·高中(2016年2期)2016-05-26
现代电子技术(2009年13期)2009-08-31
