旋转调制微机电惯性系统方案研究
2020-11-17 08:08:50邱丽玲杨小军徐海刚李海军
导航定位与授时 2020年6期
邱丽玲,杨小军,徐海刚,李海军,孙 伟,邓 亮,刘 冲
(1.北京自动化控制设备研究所,北京 100074; 2. 驻沈阳地区第四军事代表室,沈阳 110179)
0 引言
高精度、小型化是惯性导航系统的整体发展趋势,微机电惯性系统具有体积小、质量小、功耗低的突出特点[1-3],在制导弹药、无人机、机器人等领域中已经得到广泛应用[4-6],但现阶段广泛应用的微机电惯性系统精度仍在消费级与战术级之间,误差随时间累积而快速增加,并不具备高精度特性。一般可以通过器件层面和系统层面来提高惯导系统精度。器件层面是对现有技术进行攻关,开发出精度更高的惯性仪表,这种方式需要技术与工艺的不断改进,开发周期性长,耗资巨大,技术难度大,前景未知;系统层面可以通过旋转调制技术,借助旋转机构使惯性器件的常值漂移能够自动抵消导航产生的误差,以此来减小系统误差的积累,提高导航精度[7-8],已广泛应用于光学惯导系统[9-10],是一种目前较为值得借鉴的提高微机电惯性系统精度的方式。
随着微机电陀螺精度的不断突破与提高,国内微机电陀螺零偏稳定性已经优于1(°)/h,具备开展旋转调制惯性系统的基础。同时,可以通过微加工和微组装的方式,采用芯片化、高集成的转动机构和角测量装置,实现惯性测量单元(Inertial Measurement Unit,IMU)台体的高精度旋转控制。
本文从旋转调制技术的基本原理出发,探讨了旋转调制技术在微机电惯性系统的应用方案,分析了引入小型化印制电路板(Printed Circuit Board,PCB)电机后系统的实现方式;最后,利用已研制的捷联式微机电惯性系统开展旋转调制试验,进一步验证了旋转调制微机电惯性系统方案的可行性,以及该型系统在旋转调制条件下能达到的极限精度,并对了比捷联式微机电惯性系统精度。
1 旋转调制技术基本原理
惯导系统的误差方程为[11]
(1)
(2)

阑尾炎是一种在临床上常见的炎症,属于外科急腹病的一种常见类型[4]。阑尾炎的成因几乎都源于细菌感染,同时由于阑尾发生阻碍而导致阑尾炎的现象也很常见。在阑尾发生阻碍的情况中,粪石阻碍是一个重要因素,往往会导致阑尾炎的产生。阑尾炎在临床上有很多的分类,除了人们所熟知的急性阑尾炎与慢性阑尾炎之外,急性阑尾炎又可以分为多种不同的情况。
天葬师望着飞速接近的棘球,自知再无法闪躲。他的表情冷得可怕,空洞的双目,闪过了一道红芒。而后,他双足重重一踏天葬台,大力之下,竟陷入了青玉台面半尺多深,他将天葬刀横在胸前,右手握着刀柄,左手抵着刀面,张开骷髅一般黑洞洞的大口,发出了一声嘶哑的号叫。


因此,有必要将旋转调制技术应用于微机电惯性系统,全面促进高精度微机电惯性系统发展。
对于单轴旋转调制微机电惯性系统,假设系统以角速度ω绕天向匀速旋转,则t时刻由陀螺引起的测量误差为

(3)
19世纪德国著名的民主主义教育家第斯多惠曾说过:“教育的艺术不在于传授本领,而在善于激励、唤醒和鼓舞。一个坏的教师奉送真理,一个好的教师则教人发现真理。”我坚信,在“新课标、新理念”的指导下,我们不断地学习、领悟课标内涵,在教学实践中不断反思,一定能为实现《国家中长期教育改革和发展规划纲要(2010—2020年)》强调的“促进德育、智育、体育、美育有机融合,提高学生综合素质,使学生成为德智体美全面发展的社会主义建设者和接班人”这宏伟而远大的教学目标添上一道美丽的彩虹。因此,只有领悟“新课标”对教学的要求,才能开辟出那片属于孩子们理想中的绿洲,彰显真语文。

(4)
(8)建立个人阅读管理空间:个人管理空间主要是记录个人信息的板块,可以包括个人的实名信息,在线阅读学习记录,个人阅读积分累计以及积分排名榜等等。对于学生个人信息应从高校学生档案系统进行数据同步,保证实名信息的真实性和有效性。

(5)

(6)
由式(4)和式(6)可以看出,通过旋转调制技术可以调制掉与转轴垂向的陀螺常值漂移和加速度计零偏,在一定程度上可以提高系统导航精度。
2 微旋转方案探讨
由上述分析可知,采用旋转调制技术可以有效提高微机电惯性系统的导航精度。旋转调制技术的实现需要借助于旋转机构和角测量装置,而微机电惯性仪表体积小,封装后尺寸为 11.0mm×11.0mm×1.5mm左右(如图1所示),需要采用芯片级电机驱动微机电系统进行周期性旋转,以自动抵消微机电惯性仪表的误差,提高微机电惯性系统精度。
同理,对于加速度计
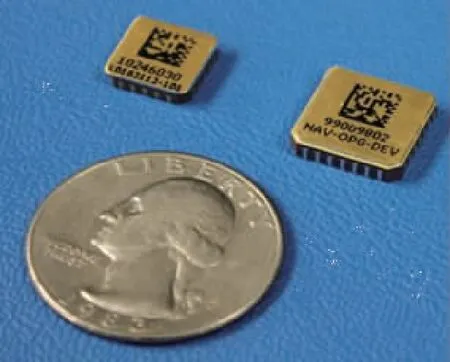
图1 微机电惯性仪表 Fig.1 MEMS inertial instrument
现阶段随着微小型高精度电机技术的突破,可以在微机电惯性系统高密度集成的基础上,开展小型化旋转调制技术应用。通过PCB电机电磁驱动技术驱动旋转平台[12-13],采用基于旋转调制的误差抑制算法,实现基于微机电旋转调制的高精度惯性导航系统。具体技术方案如图2所示。

图2 旋转调制技术方案设计 Fig.2 The scheme design of rotating modulation
首先,利用基于PCB电机的电磁驱动设计、基于微球沟槽的平台支撑、PCB电机高功率驱动环路设计以及电机矢量控制算法设计等技术,根据实际应用需求,建立基于权重系数的多目标优化函数。采用混合粒子群算法对PCB电机的极对数、磁钢数、间隙等设计参数进行仿真与优化,提高转矩密度,实现基于PCB电机的旋转平台的设计。
国内外学者对盾构法隧道施工引起的地表沉降提出了一系列分析方法。文献[1]通过对大量实测数据进行分析,提出地表沉降槽近似呈正态分布,并总结出相应的经验公式。文献[2]基于PECK公式,提出采用超几何方法计算双线平行盾构施工引起的地面沉降。文献[3]对上海软粘地层中盾构试验段进行了计算分析,提出了考虑固结因素的修正Peck公式。文献[4]在Peck公式的基础上提出了负地层损失的估算公式。但因各地的地质条件千差万别,施工方法和盾构类型亦有所差异,因此对其研究鲜有概括性结论。
其次,通过微型滑环与柔性电刷集成技术,实现小型化旋转平台的高可靠性、高稳定性多传感器高密度信号互连与通信。
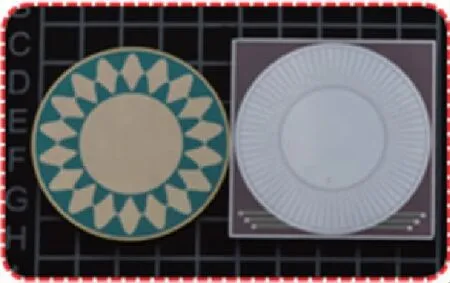
图3 旋转平台精度控制模拟装置 Fig.3 The precision control of rotating platform
再次,采用面向微平台的微小型角位移传感器,实现旋转平台的闭环控制(如图3所示)。通过研究微小型角位移传感器结构设计与优化、基于微机电惯性系统工艺的角位移传感器加工制造、基于数模混合单片集成的低功耗专用集成电路设计、微角位移传感器误差辨识与抑制,完成微小型角位移传感器的研制,为PCB电机矢量控制提供角度信息,实现小型化旋转平台的高精度控制[14-15]。
最后,针对性设计旋转调制方案,消除旋转轴刻度系数误差及相对于垂直轴的安装误差,确定旋转调制过程中激发误差及抑制误差的最优方案,以实现微惯性导航系统的高精度导航目标。
可以看出,系统的导航精度取决于对准阶段的姿态角误差和惯性器件的测量误差。
中轴对称,功能分区,主次鲜明等带有浓郁社会伦理关系的建筑观念,是传统教育建筑设计的核心思想[3]。但随着工业化的冲击以及教育观念的转变,教育建筑也渐渐走出书院式设计的影响,带有了鲜明的工业化、模数化特点。而如今现在城市中,紧凑型用地让校园集约格局开始崛起。我们通过分析传统校园格局、现代校园特点以及校园建筑集约化格局,探讨总结各环境下校园建筑格局及特点(表1) 。
在一个旋转周期内,对微机电陀螺引起的误差进行积分,可以得到微机电惯性系统的失准角为
3 旋转调制方案试验验证
为验证旋转调制技术在微机电惯性系统中的应用,研制了单轴旋转调制微机电惯性系统样机,由单轴旋转机构、微机电陀螺、微机电加表、导航计算机和二次电源构成。其中微机电惯性仪表性能如表1和表2所示。

表1 微机电陀螺性能指标
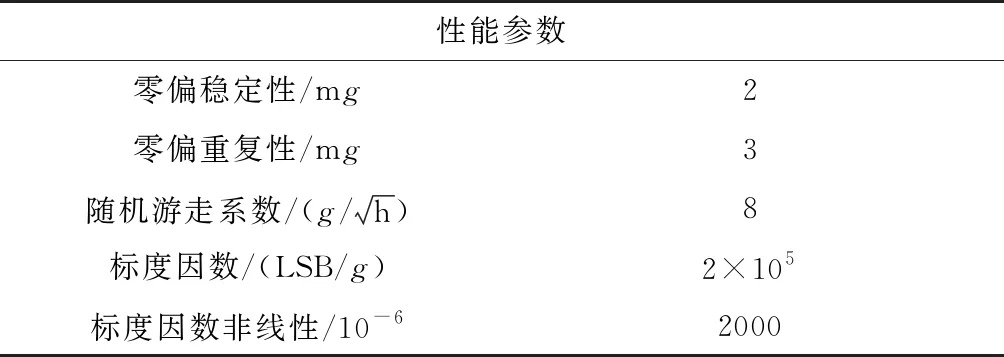
表2 微机电加速度计性能指标
3.1 寻北试验验证
采用旋转调制技术,理论上寻北精度只受随机游走噪声影响。本次试验设计采用连续正反转方案进行旋转,在转速为10(°)/s的条件下,进行6条次5 min单位置寻北试验。利用卡尔曼滤波方法对离线数据进行处理可以发现,采用旋转调制技术后寻北精度约为0.3°(1σ),明显优于同等器件精度的捷联式系统的4.1°(1σ),该方案具备一定可行性。表3所示为旋转调制方案和捷联方案寻北航向角统计结果对比。

表3 寻北统计结果
3.2 导航试验验证
为进一步验证单轴旋转调制微机电惯性系统导航性能,在转速为10(°)/s的条件下进行6条次单轴旋转导航试验。在对准5min条件下,纯惯性导航(静态导航)精度约为0.2n mile/10min(CEP);捷联方案系统在对准5min条件下,纯惯性导航精度约为2n mile/10min。两种方案位置误差变化对比曲线如图4和图5所示。

图4 捷联方案位置误差变化曲线 Fig.4 The curve of position error(Strapdown system)

图5 旋转调制方案位置误差变化曲线 Fig.5 The curve of position error (Rotation-modulation)
4 结论
1)本文针对微机电惯性系统,提出了微旋转调制方案以提高微机电惯性系统的精度,并开展了单轴旋转调制试验进行验证。在单轴旋转调制方案下,寻北精度约为0.3°(1σ);在对准5min条件下,纯惯性导航精度约为0.2n mile/10min(CEP)。
2)本文首次提出了基于PCB小型化电机的方案,具体研究中的系统集成了陀螺、加速度计、旋转平台、电源、电路、滑环、角测量装置等多种器件,后续需要进一步考虑系统热、磁对微机电惯性器件的影响。
3)后续研究中需要根据微机电惯性器件的特性,针对性设计合理的旋转调制方案,确定转停方式、转动次序和转动速度,以实现最优导航精度。
TCP协议的通信过程为:服务器端必须首先通过指定IP地址以及端口名建立侦听,等待客户端响应连接;然后客户端向对应的服务器所设定的IP地址和端口发出连接请求;待服务器与客户端成功建立连接后,双方方可通过读写函数控件收发数据,完成数据传输时,需先从客户端断开连接后服务器才能断开连接。
4)高精度角测量装置是实现旋转调制的关键,微机电惯性系统体积小,如何有效利用空间实现高精度角测量是关键问题。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
建材发展导向(2019年10期)2019-08-24 06:25:34
中国交通信息化(2019年6期)2019-08-23 08:28:40
电子制作(2018年10期)2018-08-04 03:24:44
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
光学精密工程(2016年3期)2016-11-07 09:03:34
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
测绘科学与工程(2016年6期)2016-04-17 06:51:25