
基于海底线列阵的水下目标高精度测向方法
2020-11-14 07:23孙向前
舰船科学技术 2020年10期
彭 水,孙向前,苏 军
(中国人民解放军91388部队,广东湛江524000)
0 引言
在水下军事目标探测领域,目标的高精度被动定位显得尤为重要。目前高精度水下目标被动定位方法主要采用匹配场定位和方位交叉定位[1–2]。匹配场定位要求对海区环境、阵形等要素信息掌握精准,否则海洋环境、基阵信息失配会导致性能大幅下降[3]。相对而言,方位交叉技术具有较好的稳定性,在实际应用中越来越广泛,基于方位交叉的高精度定位技术关键在于阵列的高精度测向能力[4–10]。
本文主要研究基于海底线列阵的高精度测向方法,海底阵具有尺寸不受安装平台限制的优势,可以通过增加阵列孔径提高测向精度。本文采用近场MVDR模型仿真海底线阵的测向性能,重点对其性能进行海上试验验证,研究结果对于海底阵列探测系统建设具有实际指导意义。
1 MVDR近场波束形成
MVDR是改进的一种高分辨波束形成方法,称之为最小方差无失真响应(Minimum Variance Distortionless Response)。对于大孔径线列阵而言,很多情况下是在近场区域完成测量。本文主要介绍基于MVDR的近场波束形成算法,用于提高测向精度。
在阵列的近场区域,信号的传播采用球面波模型,各基元接收到的信号幅度和相位不仅与方位有关,还跟距离有关,接收信号可表示为:

式中:Rl为信号源到第l个阵元的传播距离;c为声速;M元阵列对K个信号源的响应模型可表示为:

式中:ak为阵列对第k个信号源的响应向量:

式中:dik为第i个基元与第k个信号源的距离。
MVDR波束形成器是使对准的目标信号以单位响应通过,而同时使总的输出功率达到最小来实现主瓣的约束和对干扰的抑制,对应的最优权矢量为:

则基阵输出功率为:

其中:w为加权矢量;R为基阵几首数据的协方差矩阵;a为基阵空间扫描向量。
对近场MVDR测向方法进行仿真,目标信号为低频线谱130 dB@120 Hz,距离阵中心5 km。
阵列参数:海底直线阵,阵元数128,设计频率分别为120 Hz,阵列位x轴,阵中心为坐标原点,方位角为目标与阵列夹角。
海洋环境参数:背景噪声级80 dB@120 Hz,65 dB@2 000 Hz。
图1 为目标方位30°时的MVDR波束形成结果。由图可知,阵列主瓣方向为30°,3 dB主瓣宽度为1°,测向精度为0.5°;图2为目标方位60°时的MVDR波束形成结果。阵列主瓣方向为60°,测向精度为0.3°。在这2种情况下,阵列均实现了目标高精度测向。
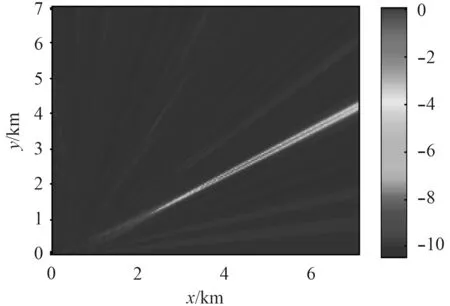
图1 目标方位30°测向结果Fig.1 Result of azimuth estimation for target at 30°
2 海上试验
2.1 试验基本情况

图 2目标方位60°测向结果Fig.2 Result of azimuth estimation for target at 60°
2018年3月,在海南万宁附近海域开展了“海底光纤水听器阵高精度测向技术研究”海上验证试验。试验基本情况如下:
参试舰船为布缆施工船和信号发射船。通过施工布缆船将1条低频光纤水听器阵铺设至海底,通过海缆连至施工船。光纤水听器阵的参数为:阵列总长800 m,128个基元,阵元间距6.25 m,设计频率120 Hz。
目标信号参数为:声源级119 dB,135 dB,频率60 Hz,120 Hz,240 Hz,每个点位信号发射时间约2分钟,换能器吊放深度35 m,目标距离阵列中心位置为2~5 km范围。
布缆船作为信号接收船,完成阵列布放后维持原位,由信号发射船携带低频信号源在S1~S4点位置发射信号,系统测量态势如图3所示。通过甲板假设的DGPS记录声源位置,作为目标位置真值,海底光纤水听器阵对目标进行测向。

图3 光纤水听器阵测量示意图Fig.3 Situational of fiber optic hydrophone array
2.2 阵元位置标校
由信号发射船携带同步声信号源海底阵低速航行,距离约1 km。航行过程中发射周期5 s、频率4 kHz的LFM同步信号,海底阵接收同步信号并进行时延估计,通并过球面交汇完成阵元位置解算。
图4 为海底阵元标校结果,阵元解算位置通过拟合后呈直线分布,与布放过程中记录的线阵首尾阵元GPS位置基本一致,满足试验要求。
需要注意的是,阵列的1~38号阵元在布放时发生了滑落,导致铺设到海底后并非直线状,在试验数据分析过程中,没有采用阵列的1~38号阵元数据。
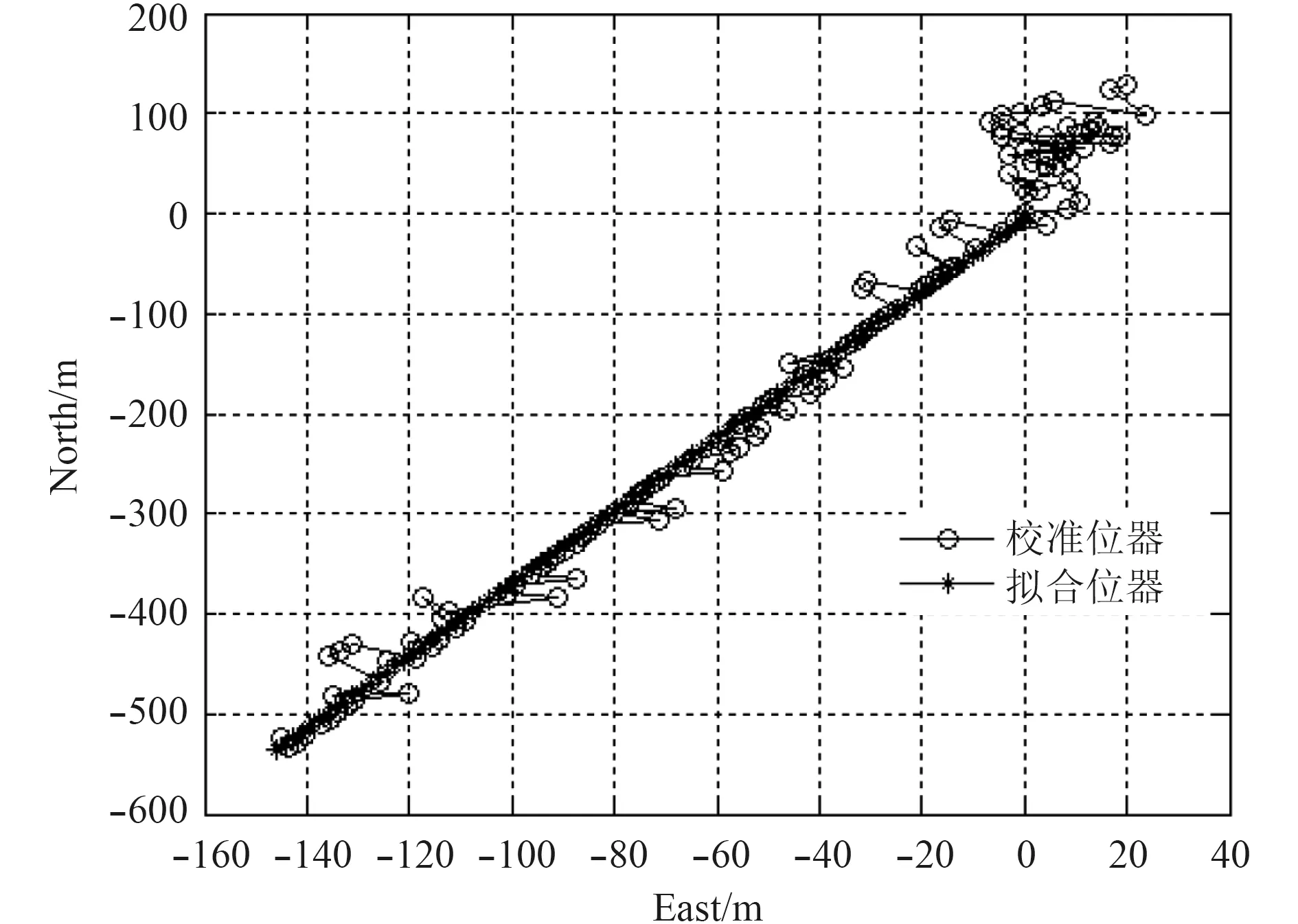
图4 阵元位置标校结果Fig.4 Calibration result of array
2.3 试验结果分析
阵列波束形成获取的LOFAR谱如图5所示。由图可知,系统在60 Hz,120 Hz,240 Hz处能够检测到清晰的谱线。

图5 阵列波束形成LOFAR谱Fig.5 LOFAR of array beamforming
目标分别在S1~S4点的方位时间历程如图6~图9所示。数据处理模型采用近场高精度波束形成方法,积分时间16 s。
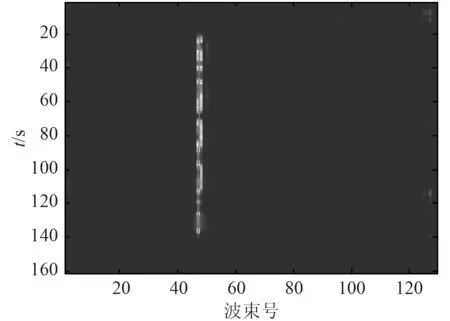
图6 S1点方位时间历程Fig.6 Target azimuth timehistory of S1
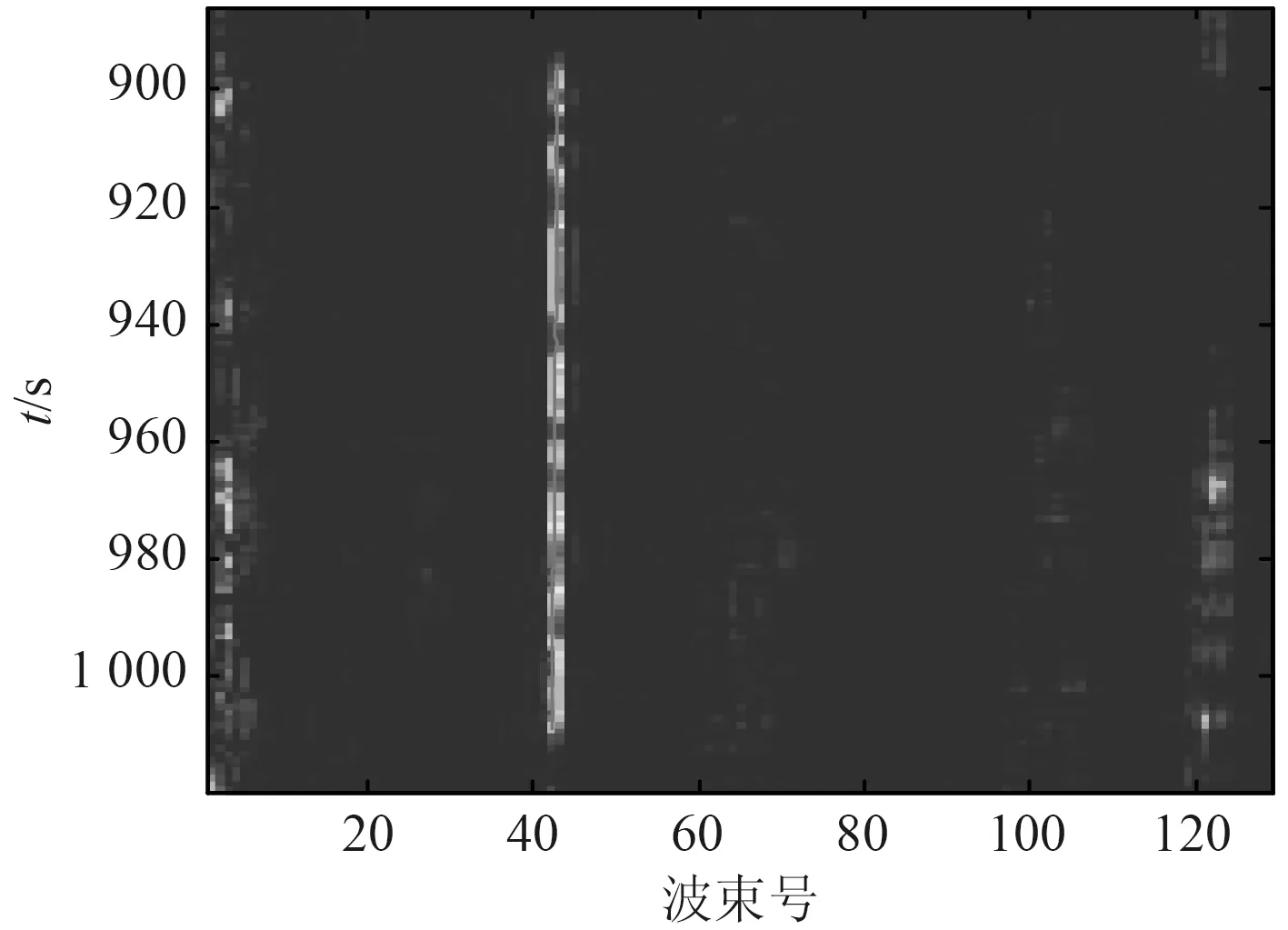
图7 S2点方位时间历程Fig.7 Target azimuth time history of S2

图8 S3点方位时间历程Fig.8 Target azimuth time history of S3

图9 S4点方位时间历程Fig.9 Target azimuth time history of S4
由图可知,在4个不同方位上,海底阵均能清晰地检测到目标信号,其中S1点接近阵列旁射方向,阵增益最高,因此信噪比最高,图中信号能量最清晰。由于信号频率的倍频关系,部分结果产生了一定栅瓣。
将阵列测量结果与声源GPS进行分析比对,并将所有目标声源级的测量结果进行汇总如表1所示。系统测向误差统计为信号发射时段内目标方位测量值与GPS记录结果的均方误差。
结果表明,目标声源级为119 d B时,系统测向误差分别为0.2°,0.2°,0.3°,0.3°;目标声源级为135 dB时,系统测向误差分别为0.1°,0.2°,0.1°,0.2°。
在这2种目标声源级条件下,阵列均实现了目标高精度测向,且误差在0.3°以内,试验结果与仿真情况基本相符。

表1 不同发射点位测向误差Tab.1 Error of azimuth for different target position
3 结语
本文研究了基于海底线列阵的高精度测向方法,简要仿真分析了MVDR方法的测向性能,重点分析验证了海底线列阵的实际测向性能,达到了试验目的。得到主要结论如下:
在2~5 km距离范围内,采用MVDR方法可以实现128元海底线列阵的目标高精度测向,仿真和试验结果基本相符,其结果一致表明目标测向精度可达到0.5°以内。
猜你喜欢
应用声学(2022年5期)2022-11-21
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
航空学报(2022年2期)2022-03-29
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
发明与创新·中学生(2019年1期)2019-03-23
科技传播(2016年10期)2016-07-15
