隧道运维管理机器人轨道及安装设计
2020-11-13 09:02付玉强
山西交通科技 2020年5期
付玉强
(山西省交通信息通信有限公司,山西 太原 030006)
0 引言
随着交通事业的迅猛发展,高速公路网日趋完善,由于部分高原地区地势复杂,桥隧比例偏高,按照隧道设计规范,在高速公路长大隧道中,均配置有较为完善的与隧道结构、长度、车流量等因素相关的各类隧道照明、监控、通风、消防等系统。从照明和监控设施来看,隧道中普遍安置大量的照明灯具和监控摄像机。按照国家相关标准设置,照明灯具间隔平均约为6.5 m,监控摄像探头间隔约100 m。灯具按照时序、洞内外光照度等参数进行控制,摄像头全天不间断采集隧道运行实时视频信息,实时传输至隧道管理站或信息监控中心,服务于路网运行管理和应急指挥调度、应急救援工作。
由于山西省高速公路建设特点,道路运输结构复杂,中重载货车比例很高,隧道中尾气、烟尘较多,隧道整体运行环境恶劣。隧道中灯具、摄像机等照明、监控设施设备容易被油烟、烟尘、尾气污损,设备使用效果和寿命受影响严重。山西省高速公路整体通行量、隧道结构特点等因素决定了在高速公路运营中,隧道相关附属设施的保养与维护工作危险性较高。同时,诸多保养和维护工作需要封闭道路才能够进行,这些实际问题都成为高速公路日常运营中各级路网运营管理者必然会面对的挑战与困难。
按照隧道设施养护技术规范要求,隧道附属设施均需定期进行系统的维护、保养、维修。但隧道设施定期清洁通常需要封闭交通,借助高空作业车完成,工作效率低、花费高、危险性大,同时容易造成道路拥堵,既减少了经济收入,又给车辆通行造成不便,事故发生率也急剧上升。同时,在日常运行管理中,隧道通行状态主要通过人工巡查进行现场监测,无法做到实时、准确、全面的监控,并且难以及时发现一些变化较快的病害特征,与病害发展实际情况不符。特别是隧道发生火灾时,无法第一时间准确获取现场情况,在隧道内温度、毒气浓度等多种因素不明确情况下,救援人员难以突入抢险。隧道发生异常事件或突发紧急事件时,如何能够第一时间有效、准确掌握隧道运行现场实际情况已成为高速公路运营管理单位亟待解决的一大难题。
如何将机器人技术应用到高速公路隧道管理运维中,也成为交通研究领域十分关注的课题。2001年,Amir Shapiro等人提出一种四足机器人的设想[1],并对其运动结构进行了理论分析。2005年,Agostino De Santis等人在意大利政府项目“国家行动计划”中提交了一种交通隧道内轨道式消防机器人的设计[2],这种机器人的优点是当交通隧道内发生火灾时,机器人可以代替消防人员通过固定导轨直接到达着火点进行灭火工作。2006年,Seung-Nam Yu等人设计了一种轮式机器人[3],通过将机器人组件置于铰接式升降平台上,并将该平台安装于轮式车辆上,采用多个超声波传感器与摄像头共同工作,可以实现人工控制下隧道内部墙壁损伤远程探伤和修复功能。2011年,J.G.Victores等人[4]提出了一种用于交通隧道内壁修复的隧道施工机器人,将这种机器人设置在无人驾驶的卡车上,并通过该卡车上搭载的电脑实现对机器人的控制。2009年,姜芸、付庄等人提出了一种履带式机器人的改进方案[5],这种经过改进的履带式机器人便于携带,并有更强的环境适应能力。1980年,日本就成功研制出变电站巡检机器人并投入使用[6],该机器人采用红外热技术、图像采集技术,可以在路边轨道上运行,实现对变电站信息的实时监测。2012年,中科院沈阳自动化研究所成功研制了轨道式巡检机器人[7],主要针对电网企业中的变电站巡检工作。移动巡检系统采用单排轨道,移动机构采用跨座式机构,系统能够适应多种恶劣天气状况,同时具有移动速度快、定位准确、稳定性好、可靠性高等特点。综上所述,轨道机器人在各行业已得到广泛应用,但在公路隧道运营管理中,受隧道环境、施工难度等因素制约,特种机器人仍处于理论研究阶段。
1 机器人整体结构
整体系统结构和工作原理示意如图1所示,在隧道两侧各安装一条轨道,在轨道两侧配置充电站,可对机器人自动充电,每1 km轨道安装1个移动平台于轨道梁上。根据现实需求在移动平台上配备照明灯清洁毛刷、监控云台及语音对讲模块等。机器人本体包括移动平台和功能平台两部分,其中移动平台包括两套独立的运行系统,二者各有两个驱动轮带动平台移动,当两者之一出现故障,可由另一组带动移动到便于维修和更换的位置。

图1 系统结构和工作原理示意图
考虑到隧道内无线信号的衰减,拟采用传输距离较远,抗干扰能力较强的5.8 GHz频段无线网桥与机器人进行通讯。通讯系统采用AP覆盖方式搭建,每200 m放置一个AP热点,AP热点与远程指挥系统通过光缆连接,机器人携带无线路由与AP热点无线连接。另外隧道内的巡检人员和车辆也可以通过AP网络与监控中心进行通讯和定位。机器人在隧道内的定位采用AP热点定位、RFID定位、机器人里程计3种方式相结合。AP热点定位和RFID定位为绝对式定位,机器人里程计定位为相对式定位(增量式定位)。
2 轨道及附件设计
隧道运维管理机器人在轨道上运行来完成隧道巡检、照明灯清洁和应急指挥等任务。由于隧道通车,在隧道空间内形成一个限界空间,机器人在执行任务时不能够进入此限界空间。同时,隧道照明灯安装于隧道侧壁上方。为了满足清洁照明灯的任务要求,机器人需要运行于照明灯斜上方空间内。由此,提出设计方案如图2所示。
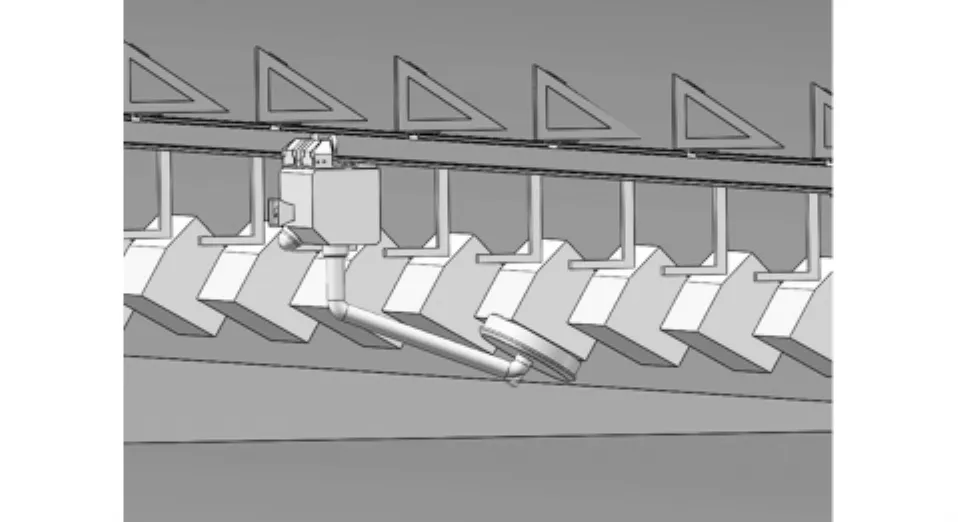
图2 轨道整体设计方案示意图
隧道内壁上方安装支架,将轨道安装在固定支架上,机器人以悬吊的形式,通过轮式行走机构在轨道上运行。在轨道设计时,需要根据轨道的工作环境(尤其是隧道温度变化)、受力特点以及成型工艺,选择合适的轨道截面形状、轨道尺寸、轨道材质以及安装方法,保证机器人能够在轨道上安全可靠运行。
2.1 轨道工作环境分析及轨道铺设方案
隧道地处山区,四季温差较大,隧道内四季温度变化范围在-20℃至30℃之间,温差高达50℃。由于轨道为金属材质,具有热胀冷缩的性质,所以轨道在长度方向上会伴随温度的升高而伸长,温度下降而缩短。伸缩长度满足式(1):

式中:△L为伸缩量,m;λ为金属线膨胀系数,℃-1;L0为温度变化前的初始长度;T1、T0分别为变化后的温度和初始温度,℃。
若采用无缝铝合金轨道,假设隧道全长1 km,在-20℃~40℃温差作用下,全长1 km的轨道整体收缩量将会达到1.41 m。这样被固定的轨道在温度作用下其内部会产生较大伸缩应力,容易导致轨道产生不可预知的弯曲形变,使得机器人在轨道上无法正常运行。为了防止轨道因内部应力产生变形,需要对轨道进行更复杂的安装固定,这样增加了轨道在隧道内铺设的施工难度和施工成本。采用定长轨道有缝衔接的形式,如图3所示,将一定长度的轨道通过吊扣衔接起来,吊扣作为轨道的支座,允许轨道两端能够在吊扣内自由移动,并在吊扣内为轨道端部预留出轨道伸缩缝,伸缩缝宽度为t,当温度降低时,轨道缩短,伸缩缝宽度t增大,当温度升高时,轨道伸长,伸缩缝宽度t减小,当温度上升到最高温度时,收缩缝宽度减小到伸缩缝设计值ts。在轨道铺设时,根据实际施工环境温度,选择具体的施工伸缩缝设计值。通过预留伸缩缝的形式,轨道不会因外部环境温度变化而在轨道内部产生过大的伸缩应力,保证了机器人在轨道上正常运行的同时,提高了轨道的承载性能,降低施工难度和施工成本。

图3 轨道铺设方案示意图
2.2 轨道材料、成型工艺及长度选择
轨道伸缩量的大小,不仅与环境温度变化量有关,也与单根轨道自身长度成正比,单根轨道越长,意味着相邻轨道之间需要预留出来的伸缩缝就越大,机器人在低温时运行到轨道伸缩缝处产生的颠簸就会越大,机器人对轨道和支架吊点作用的冲击载荷就会越大。同时,过长的单根轨道也会增加轨道的生产难度和运输成本。单根轨道越短,也意味着支架间距越小,轨道需要的支架和吊扣的数量就会越多,造成施工成本上升。因此,需要选择一个合适的轨道长度,使整个隧道内轨道接缝的数量和接缝的大小适合机器人的运行。
机器人及轨道均以悬吊形式在隧道侧上方空间工作,选较轻质的轨道既有利于提高轨道及其安装结构的安全性,也有利于降低施工难度和施工成本,拟采用铝合金作为轨道材料。结合铝型材的生产工艺,参考工业铝型材的标准规格,选择单根轨道长度为6 m,根据式(1)可知在-20℃~30℃温差下,采用铝合金材质的轨道伸缩量为8.5 mm。
2.3 轨道及附件受力分析
轨道通过支架悬吊于隧道上方,机器人运行于轨道上,轨道受到的载荷分为动载荷和静载荷两类,静载荷为轨道自身重力施加在轨道上的载荷,动载荷主要由机器人在轨道运行时,机器人自重对轨道形成的载荷,并且机器人和轨道之间的摩擦力、机器人工作负载、冲击震动以及隧道风等都会对轨道形成扰动。
2.4 轨道及附件截面设计及静力仿真
结合轨道的功能、受力特点、轨道生产工艺等方面,轨道截面采用工字型截面,工字形上翼缘与吊扣配合,使轨道能够在吊扣中自由移动。工字型的下缘可以用来为机器人提供行走平面和导向平面。
通过对轨道的受力分析可知,轨道受到的载荷类型为弯曲、扭转、剪切和局部垂向拉伸等载荷的组合,工字型截面具有良好的抗弯、抗扭性能,并且截面剪切应力分布均匀。为了使轨道能够在保证强度、刚度的同时,具有较轻的质量,轨道采用具有内部支撑的薄壁结构,使轨道截面能够在一定面积下获得较大截面惯性矩。
3 机器人移动平台方案设计

图4 机器人移动平台方案
如图4所示,每个机器人分体均有两个移动平台,每个移动平台有两个驱动轮,两个导向轮。驱动轮为超级人造胶材质,具有较强的抗冲击性能,能保证机器人在轨道上行驶平稳;导向轮的特殊结构不仅能在机器人行驶过程中起到导向作用,还能在遇到冲击的时候保证机器人始终不脱轨,在保证安全的同时也避免了对轨道的二次冲击,提高了系统的稳定性和安全性。

图5 移动平台的拆卸过程
每个移动平台与机器人本体之间通过转轴连接,保证机器人能顺利地转弯。在两个移动平台之间的机器人本体上安装了滑线集电器,当机器人行驶到充电区域内,通过滑线集电器进行充电。
为保证机器人在轨道的任何位置都能顺利地安装和拆卸,如图5所示,移动平台单边驱动轮和导向轮可以整体移动。当将紧固螺钉解除之后,单边驱动轮和导向轮可整体向外移动,使得两个驱动轮间距变大,从而使机器人可以整体从轨道上取下来,反之即为安装过程。在保证安全的前提下,提高了安装和后期维护的效率,降低了维护成本。
4 轨道安装施工方案
4.1 轨道安装程序

4.2 机器人移动轨道安装方案
轨道采用“工”形铝合金轨道,在隧道两侧线缆盒架上方每隔2 m架设一个轨道安装架和轨道吊扣,每根轨道通过4个轨道吊扣进行固定,轨道与吊扣之间采用穿插式连接,以解决由于热胀冷缩现象引起的轨道长度变化问题。轨道安装位置如图6所示。

图6 轨道安装位置示意图
轨道吊扣与隧道内壁通过轨道安装架进行安装,单个轨道安装架与隧道内壁通过膨胀螺栓连接,与吊扣通过螺丝连接。安装过程中需要保证吊扣的水平度及轨道安装的直线度。轨道安装方案如图7所示。

图7 轨道安装方案示意图
4.2.1 划定高速标线
从隧道入洞口开始,到隧道出洞口位置,在设计高度,与路面平行,划定高度标线。在直线轨道安装每隔30 m的距离,以2 m为间距,划定垂直方向位置标线,高度标线与垂直标线交叉点即为直轨吊架安装孔中心位置。
4.2.2 直线轨道安装
在高度标线和垂直标线的交叉点,用直轨吊架安装孔定位模板,确认安装吊架的准确位置,安装直轨吊架如图8所示。在直轨上,每隔2 m距离,穿一个吊扣架。穿好吊扣架的直轨,通过吊扣架的2个螺丝孔位,暂时固定到吊架上,固定好所有直轨。直线吊架与吊扣架如图9所示。

图8 直轨安装示意图

图9 直线吊架与吊扣架示意图
逐个松动吊架与吊扣架的固定螺丝,调整整个轨道平直。整个轨道平直,没有明显凸起、凹陷后,拧紧吊架与吊扣架的固定螺丝。在吊架与吊扣架平面连接处,4个点,把吊架与吊扣架点焊死。
4.2.3 弯轨安装
紧急停车带、隧道出入洞口弯轨由弯轨专用吊架与吊架扣固定。弯轨吊架与吊扣架如图10所示。
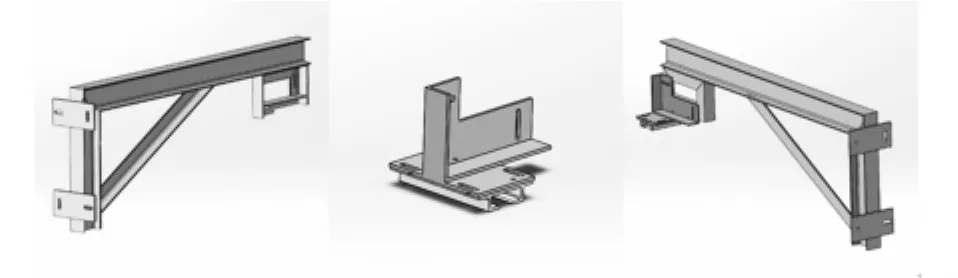
图10 弯轨吊架与吊扣架示意图
a)弯轨轨道固定方式。弯轨吊架由中间吊架及两端吊架组成,中间吊架为弯轨专用吊架(采用与直轨吊架相同的锚固螺栓),两端吊架为直轨吊架。
b)定义隧道直轨平面为A平面,隧道直轨转向紧急停车带墙面为B平面,紧急停车带直轨段为C平面。先安装AB平面弯轨。在A平面段,距离路面6.38 m的位置,暂时固定一个直轨吊架1。吊架上端安装孔的位置由图11确认(其中,垂直标线在高度标线上距AB平面交线40 cm)。把吊扣架穿到弯轨1上,按照图11暂时确认弯轨1位置,暂时把吊扣架固定到直轨1吊架上。弯轨弯曲的位置,暂时通过隧道顶部吊钢丝或者工人托住。按照B平面宽度,确认弯轨预留长度。在地面切割好弯轨位置后,再重新安装到位。同时确认弯轨专用吊架2安装位置。

图11 紧急停车带吊架示意图
c)按照上一步确认的弯轨1在B面的预留长度,确认弯轨2在B面的预留长度,固定弯轨2吊架及弯轨2。安装好的弯轨1,弯轨2要保证连接处平整,整个轨道平直。
4.2.4 调整轨道平直性

表1 轨道安装间隙参考表
直线导轨和弯轨安装完成后,逐个松动吊架与吊扣架的固定螺丝,调整整个轨道平直。整个轨道平直,没有明显凸起、凹陷后,拧紧吊架与吊扣架的固定螺丝。在吊架与吊扣架平面连接处,把吊架与吊扣架点焊焊死。
由于轨道采用定长轨道有缝衔接的连接方式,轨道在安装过程中需要根据施工现场的温度预留轨道之间的安装间隙,如表1所示。
猜你喜欢
江西电力(2022年7期)2022-09-14
都市人(2022年3期)2022-04-27
云南画报(2021年9期)2021-12-02
国际太空(2021年8期)2021-11-05
铁道建筑技术(2021年3期)2021-07-21
建材发展导向(2021年6期)2021-06-09
环球时报(2019-12-05)2019-12-05
建材发展导向(2019年3期)2019-11-28
中国外汇(2019年6期)2019-07-13
智富时代(2018年5期)2018-07-18