多器联合月球极区探测通信系统设计
2020-11-12 07:11李炯卉
深空探测学报 2020年4期
刘 适,李炯卉
(北京空间飞行器总体设计部,北京 100094)
引 言
自1994年起,美国先后通过“克莱门汀号”(Clementine)环月探测器、“月球勘探者号”(Lunar Prospector,LP)探测器、“月球勘测轨道器”(Lunar Reconnaissance Orbiter,LRO)、月球坑观测和遥感卫星(Lunar Crater Observation and Sensing Satellite,LCROSS)验证了月球两极存在水冰[1]。国内外研究人员认识到了月球极区重要的科学研究价值和资源应用价值[2]。
月球极区探测已成为当前国际深空探测的热点之一,主要的航天大国、航天机构纷纷启动或开展了月球极区探测任务[3-5]。国外规划中的各类极区任务已基本覆盖各种类地外天体探测器,包括详查探测器、着陆探测器、巡视探测器和机器人等。2019年,美国进一步确定了“阿尔忒弥斯1号”(Artemis 1)任务,预计在2024年进行载人登月。有别于“阿波罗”(Apollo)工程,“阿尔忒弥斯”任务的目标是人类在月球长期驻留。多器联合探测是系统性、规模化月球极区探测、开发的必然趋势,是人类月球长期驻留亟需突破的关键环节。
目前,国内外尚无月球极区多器联合探测任务的工程先例,其通信系统的设计没有可直接借鉴的工程经验。相对于以往的月球探测任务而言,多器联合月球极区探测任务通信系统更加复杂,难度也更高,具体表现为:首先,通信系统架构更为复杂,多器联合探测任务通信系统需要兼顾较高系统可靠性、较低系统开销、较好系统扩展性;其次,信道环境更为恶劣,月球极区探测需要面临低仰角通信,将导致较为严重的多径效应发生,同时,月球极区表面电特性参数的不确定性对通信系统的适应性提出了更高要求;再次,信道容量的需求更高,为适应月球极区多器联合探测模式以及新型载荷高数据量需求,通信系统信道容量相对以往任务有量级的提升。
本文对月球极区探测任务通信系统的任务需求进行分析,针对需求和设计难点,提出相应的技术解决途径。
1 月球极区探测通信需求分析
1.1 通信系统架构分析
从通信链路可靠性、传输延时等角度分析,直接对地链路可有效减少信息传输路径中的节点,是首选方式。而在月球南纬82°以上的地区无法实现每日均有对可见,以月球南极极点附近为例,每个月中只有约半个月可以保证月面探测每日均对地可见弧段,且均有对地高度角不超过6.5°。加之月表地形起伏的不确定性,月球南极探测器对地可见性相对于理论分析结果会更加恶劣,无法保证任务在轨阶段能获得实时可用的直接对地链路。综上所述,月球极区着陆器必须利用中继卫星,保证其对地通信。
针对月球极区多器联合探测的工作场景,若中继卫星直接为每个月面目标提供中继服务,对中继卫星和通信能力受限的月面通信终端而言,负担都较大。考虑到,在月面器间通信距离一般相对于中继通信距离要短,在同等代价约束下,其码速率相对于中继通信链路高,有利于探测器轻小型化设计。在有限的发射重量约束下,有利于拓展探测规模,获得更多的科研成果。
在较为理想的通信架构中,可将月面通信终端划分为主节点和次节点两种。一般情况下,中继星仅为主节点(如着陆探测器等大型探测器)提供中继服务,主节点为周边次节点(巡视探测器等小型探测器)提供月面器间通信服务,如图1所示。这种模型与地面移动通信的蜂窝架构较为相似,更容易实现系统资源的最优配置。作为主节点的大型探测器中继通信能力要优于次节点,能够支持较高的通信码速率,且可保证其不会成为约束系统数据吞吐率的瓶颈环节。同时,对于中继卫星而言,在其日常工作中,仅有一个或几个主节点接入。相对于直接为所有节点提供中继服务而言,其系统复杂度和资源开销更低,系统扩容性更好,更容易实现中继卫星中继载荷配置的优化设计,也更利于提高次节点通信速率。
次节点与中继卫星间的中继链路并非没有工程价值。中继链路可以覆盖月面更大范围内的目标,受月面地形遮挡和多径的影响相对月面器间通信链路小,链路可靠性更高。对于次节点而言,月面器间通信链路与中继链路两者各有优势。在重量、功耗以及包络尺寸等工程实现约束允许的前提下,次节点可配置器间通信和中继通信设备,两者可互为补充,互为备份,提高整个通信系统的鲁棒性。反之,可根据具体工作场景,择优配置通信设备。

图1 月球极区探测通信系统架构示意图Fig.1 Communications system diagram for lunar pole exploration probes
1.2 信道环境条件分析
月球极区地形较为复杂,通信过程中可能存在多径效应,严重时可能导致通信中断。对于低仰角对地通信链路,月面对无线电波的反射和散射等作用也将加剧链路中的多径效应。此外,在多器联合探测任务中,在探测器较为集中的区域还可能因为存在多个可移动人造物体,导致信道环境更为复杂。
由于人类对月球南极区域未进行过近距离探测,国内外月球探测任务所获取的月球极区月表电特性数据十分有限。同时,月表遥感获取的数据无法有效剥离其它因素的影响,不能直接获得其电特性参数的准确数值。此外,由于月球极区可能存在固态水,导致已获得的低纬度地区月表数据无法在极区探测任务中直接使用。无线电信号在真空与月表分界面上的边界条件是月面通信链路建模分析的关键环节之一,而边界条件主要由月表的电特性参数决定。目前无线电波在月球极区表面传输特性尚无法精确建模。
月面多器联合探测链路较为复杂,存在多条中继链路和月面通信链路同时工作的情况。此外,随着探测器功能的日益复杂,其自身平台与载荷设备工作也可能引入电磁干扰,在通信系统设计过程中要充分考虑复杂电磁环境的兼容性。
1.3 数据量需求分析
月球极区探测的详查任务和中继卫星对地转发任务对链路数据量的要求较以往月球探测任务要高。
1)月面详查任务数据码速率需求
以LRO为例,其窄视场相机日均产生数据量为515 Gbit,宽视场相机日均产生数据量为41 Gbit,微型雷达日均产生数据量为7.7 Gbit。在LRO任务中,除了S频段低速上下行链路之外,还配置了Ka频段的高速下行链路,其最大下行数传码速率达到100 Mbit/s,以满足任务需求。类比LRO任务数据量需求,考虑到我国深空站已实现全球布站,详查器每日最多有一半的弧段被月球遮挡,我国极区详查数据对地传输码速率要至少满足10 Mbit/s量级,争取实现100 Mbit/s量级下行数据传输。
2)中继卫星对地转发任务数据码速率需求
“嫦娥3号”着陆器与巡视器的下传码速率最高速率在1~2 Mbit/s之间。假设我国未来月球极区探测任务中最高有10个月面目标,则中继卫星对月面目标返向链路下传速率应至少满足10 Mbit/s量级。此外,考虑到未来月面目标智能化操作对前向链路码速率需求,中继卫星应至少具备上行1 Mbit/s的接收能力。
2 月球极区探测通信系统链路架构规划
在包含了月球轨道中继卫星、月面详查器、着陆器、巡视器和移动机器人、宇航员等目标的典型月球极区探测任务中,中继卫星主要承担月面目标与地面之间的中继转发。详查探测器负责月球极区,特别是候选着陆区域的详查工作。着陆器负责携带巡视器、移动机器人与宇航员等目标软着陆至月面,并开展月面原位探测任务。月球极区探测通信系统链路规划示意图如图2所示。
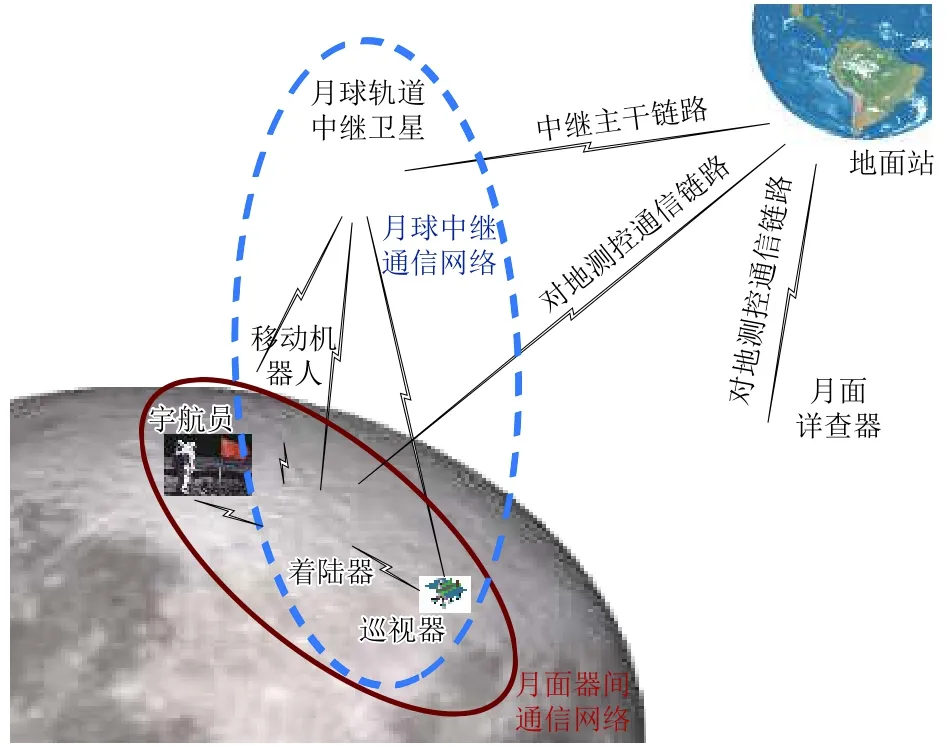
图2 月球极区探测通信系统链路规划示意图Fig.2 Communications system diagram for lunar exploration
月球极区探测期间,中继卫星可与月面目标之间建立中继前向和返向链路,并通过中继主干链路完成月面目标与地面之间的数据转发工作,上述链路组成月球中继通信网络;月面目标之间以着陆器为主节点,搭建月面器间通信链路,组成月面通信网络。其中,中继链路与月面器间通信链路之间组成异构备份链路,提高系统可靠性。
地面站分别与着陆器、中继卫星和详查器建立测控通信链路。其中,着陆探测器对地测控通信链路主要负责着陆月面前的测控与通信任务。中继卫星的对地测控通信链路与中继主干链路可以进行合理复用,进而实现星载资源的优化资源配置。详查器对地测控通信链路主要负责完成自身测控和详查数据等载荷数据的对地传输功能。
考虑到月球极区详查器轨道一般选择月球极轨以满足任务需求,同时,执行详查任务期间轨道高度需要尽量低以获得更好的详查效果,所以,详查器一般对于月面各目标而言过顶弧段较短,无法满足长时间中继转发需求,不适宜承担中继通信任务。但不排除通过合理的轨道优化设计或任务规划设计,使详查器可以满足中继通信任务需求,通过与月面目标之间建立中继链路,与中继卫星构成互为备份关系,提高中继通信网络可靠性。这也将造成详查器任务设计和工程实现的复杂性增高。
3 月球极区探测通信系统关键环节设计
多器联合月球极区探测任务通信系统需要有针对性地开展多址接入设计、高适应性链路设计、高效数据传输设计,以满足复杂通信系统架构、恶劣信道环境和高信道容量等任务需求。
3.1 多址接入设计
本文提出的月球中继通信网络和月面器间通信系统均属于多址接入网络。所谓多址接入是指多目标用户的网络接入控制,包括信道划分、分配和能量控制等功能,是网络协议中的重要组成部分。合理的接入协议设计可以保证较高的网络利用率和较强的系统可扩展性。接入协议分为竞争、非竞争和混合接入3类。
竞争接入主要包括基于随机访问模式和预约/冲突处理机制等两类。前者代表为Alhoa协议,采用“想发既发,碰撞后随机退避重发”的工作模式,会导致较高的冲突率;后者的代表是载波监听多路访问(Carrier Sense Multiple Access,CSMA),在IEEE 802.11等协议中应用,其采用信道监听和预约的方式,来降低冲突率。其在国际空间站任务中得到应用,通过在国际空间站内布设无线接入点,实现有线网络和无线设备之间的数据通信[6]。竞争接入协议接入控制方式灵活,同步要求低,可有效降低月面探测器对地面控制手段的依赖。但随机访问模式在接入用户数量增加到一定程度后将导致较高的冲突率,在月面通信这类相对较低码速率传输场景中会明显影响到带宽利用率,不宜采用。反之,预约/冲突处理机制相对而言更适于月球极区探测任务,但也仅限于对传输实时性要求不高的任务阶段。
非竞争接入主要包括频分多址(Frequency Division Multiple Access,FDMA )、码分多址(Code Division Multiple Access,CDMA)和时分多址(Time Division Multiple Access,TDMA )等。通过通信节点之间的资源分配机制来避免竞争。这类协议往往需要某种形式的集中协调机制。由于其在集中式单跳网络中较容易实现,在航天通信领域得到了广泛应用。在美国的“阿波罗号”载人登月任务中,采用FDMA方式完成登月舱与指令服务舱之间的中继通信,以及登月舱(月球车)和出舱航天员之间的月面通信[7-8];国际空间站的空−空通信系统是超高频(Ultra-High Freqency,UHF)频段TDMA系统,用于空间站、航天飞机和舱外机动单元之间近距离话音、指令、遥测等数据传输服务[9];美国跟踪与数据中继卫星系统的S频段多址链路(S-band Multiple Access,SMA)采用CDMA方式为用户航天器提供服务,用于支持数据通信,以及用户航天器的测距和测速等功能[10]。非竞争接入模式工程实现较为简单,链路稳定性较高,但其所采用的固定方式灵活性和扩展性较差。所以,其更适合在对链路实时性、稳定性要求更高的探测任务关键环节(如多器分离、探测器起飞或着陆等)中使用。
混合接入方式是将多种接入协议结合,以弥补单一方式下的缺点,实现灵活接入和最大化资源利用率。在月球极区探测任务中,宜采用混合接入方式,在实时性要求不高的日常工作阶段可采用竞争接入方式,由通信系统内部自发调度信道资源。而在对链路实时性和稳定性要求更高的关键阶段,应采用非竞争接入方式,确保任务顺利开展,具体操作流程如图3所示。

图3 多址接入流程示意图Fig.3 Diagram of multiple access process
此外,多址接入协议可有效支持多探测器联合探测任务的开展,增强通信信道控制、调度的灵活性、实时性和可靠性,降低对地面控制的依赖。对于器地时延较大的行星探测也有较强的工程价值。
3.2 高适应性设计
针对月球极区低仰角通信信道的不确定性和多器联合探测对可扩展性的需求,通信系统需要具备更高的任务适应性与灵活性。
在月面探测器间进行无线通信过程中,传输信道中包含真空和月表两种媒质,导致其传输特性较其在自由空间中的传输复杂。低仰角通信链路的多径效应相对于自由空间通信链路明显。月面存在岩石、撞击坑、人造探测器等障碍物都将成为复杂多径环境的诱因。此外,月球表面存在的不规则起伏,月表电特性参数的不确定,以及月面探测器的移动特性等因素都将增大多径效应产生的随机性。所以,月面通信系统应具备抗多径能力。而扩频通信、正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)、分集技术等多种技术均可有效抑制多径效应对通信系统的影响。
是器乐教学的基本方法,由老师进行身传言教,老师主要讲解乐器的特点,演奏的要领和注意事项,同时要对演奏中的姿势、指法、呼吸等作示范表演,让学生直观地听、直观地看,对照自己纠正错误的地方,获得立竿见影的教学实效。以巴乌吹奏时的指法教学为例,在教学过程中要遵循由浅入深的教学原则,先让学生跟着自己模仿低音so、la、si的指法与吹奏,然后让他们参照巴乌常用指法表对do、re、mi三个音进行自主摸索着学习,并引导学生总结低音区与中音区吹奏时气息上有何区别,循序渐进地培养他们的观察能力和学习主动性。
考虑到直至月球极区任务实施前,通信信道的不确定性仍可能无法完全规避,通信设备还应采用软件无线电设计,在不变更其硬件的情况下,通过软件加载来适应实际信道情况,通信设备框架如图4所示。通信设备由射频模块和基带模块组成,射频模块负责提供射频通道,完成上下变频、滤波等功能;基带模块负责基带信号处理、调制与模−数/数−模转换等功能。单机设备采用模块化设计思路,例如射频模块可以根据单机设备使用需求,采用不同频段通道模块,并通过软件无线电实现具体频率设置;基带模块根据实际需求,来配置对地通信基带和(或)中继/器间通信基带模块,并具备在轨软件更新、升级能力。
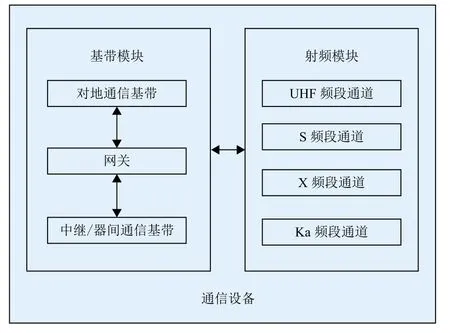
图4 通信设备框架Fig.4 Communication equipment frame
软件无线电技术具备以下任务层面的优势:
1)有利于增强无线电设备对复杂任务需求的适应性,月球极区探测任务将为未来长期无人、有人月球探测提供先期验证或直接作为其中一部分,发挥重要作用,采用软件无线电技术的设备对于通信系统规模的可扩展性、新增性能需求和无线信道不确定性等方面具有较强的适应能力,可充分发掘无线电设备潜力;
2)有利于实现无线电设备硬件平台的统一化,月球极区探测采用多器联合探测的模式,探测器需要搭载对地测控通信、中继通信、月面器间通信中的一种或多种无线电设备,将同类的无线电设备的硬件平台进行统一,可以有效缩短单机设备研制周期,降低调试复杂性,提高设备可靠性,有效节约研制成本;
3)有利于不同月球探测任务间合作的开展,不同探测任务之间往往采用不同的无线通信手段,包括不同的数据速率、纠错编码方式以及调制类型等,在这种情况下,软件无线电设备可通过对其重新配置以适应不同的信号特征,实现不同探测任务之间的信息互通,获取更多的任务成果,同时,也可以为未来潜在的国际合作提供支持,共同开发月球资源。
此外,为应对未来更为复杂、庞大系统的互联互通需求,应高度重视提高通信系统智能化程度,降低地面飞行控制人员的学习成本和操作复杂程度,也可为未来复杂深空探测任务进行技术积累。通信系统智能化可以包括以下几个方面:① 具备多探测器通信设备自组网能力,可自主建立可靠、高效的中继与器间通信链路,建立合理的入网与退出机制,实现信道资源按需分配、动态调整、充分利用,并具备延迟、中断容忍能力;② 对信道质量进行动态评估,对于突发链路质量恶化,能够进行实时判断,组织链路重新建立和重传,避免全程依赖地面判断所引入的天地大回路时延,在提高通信系统稳定性的同时,也有利于月球及更远深空探测任务中复杂、密集动作的高效执行;③ 根据任务需求动态调整通信系统参数,如码速率、调制方式、发射功率、天线波束等,充分利用信道容量。
3.3 高信道容量设计
随着任务复杂性的不断提高,对数据传输速率的需求也不断提高。以月球极区探测任务为例,月面详查、中继通信以及工程、科学载荷等多样的探测任务对数据传输速率的需求,相对于我国以往月球探测任务更高。我国月球极区探测任务可采用激光通信和Ka频段无线通信手段提高数据传输速率。
激光通信波束发散角小、指向性好、功率密度大,具备信道带宽大、码速率高等优势。近年来,激光通信作为航天任务的重要信息传输手段得到了大力发展,成为提高深空通信链路性能的热点技术之一。美国、欧洲、日本等不仅广泛开展了空间激光通信链路理论研究、关键技术研究、原理样机研制、地面和在轨演示验证等工作,而且还建立了比较健全的检测与评估系统和配套地面激光通信站。在2013年9月发射的LADEE( Lunar Atmosphere and Dust Environment Explorer)探测任务中,进行了月球激光通信演示试验(Lunar Laser Communications Demonstration,LLCD),对地通信速率达到了上行20 Mbit/s,下行622 Mbit/s[11],展示了激光通信在月球探测器对地通信任务中的巨大潜力。但激光通信也有不足,譬如其在传输过程中受大气和气候影响较为严重。同时,激光通信在我国深空探测领域尚无工程应用经验,其编码与调制等可以基于无线电通信的成熟工程基础,但仍有部分核心技术需要攻克,如高效、低抖动的探测器,高转换效率的激光器,稳定、精准的捕获跟踪瞄准,以及大气补偿等技术。由于较高精度的指向性需求,对于航天任务测控通信使用场景,激光是无法全面替代无线电射频通信的。我国深空探测领域目前使用的S频段和X频段作为测控通信频段,以X频段通信为例,根据国际空间数据系统咨询委员会(Consultative Committee for Space Data Systems,CCSDS)标准建议[12],单一任务占用带宽最高仅为10 MHz,无法满足高速数据传输需求。考虑到Ka频段具有更大的信道带宽(见表1),在我国月球极区探测任务中宜采用Ka频段作为高速数据传输的无线通信频段使用,与激光通信链路形成异构备份。
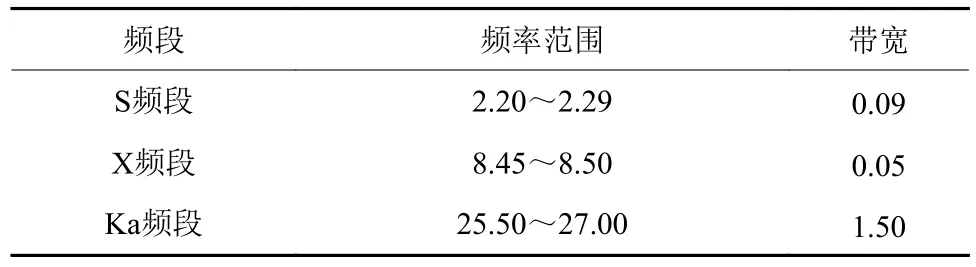
表1 CCSDS建议对地下行链路通信频率Table 1 CCSDS frequency allocation for space-earth transmission link GHz
目前,我国月球探测任务主要使用二进制相移键控 (Binary Phase Shift Keying,BPSK)调制方式,频带利用效率较低。正交相移键控(Quadrature Phase Shift Keying,QPSK)、高阶调制(如8PSK和16QAM等)以及脉冲成型(如高斯最小频移键控(Gaussian Filtered Minimum Shift Keying,GFMSK)等)是该领域目前技术发展的具体实例。其中,BPSK的理论带宽利用率为1 bps/Hz,QPSK为2 bps/Hz,8PSK为3 bps/Hz,GMSK效率介于BPSK与QPSK之间。但还没有一种技术可以解决指定应用环境中的所有问题,例如高阶调制频带利用率最高,但导致接收端解调门限增加,同时造成器载功率放大设备一定的功率浪费。在选择具体的调制方法时,必须权衡多方面的因素,包括通信环境、码速率、设备复杂度、发射功率、技术成熟度和其它约束条件。此外,我国的月球极区探测活动通信系统的设计应遵循国际标准,并提前、积极开展国际航天机构间沟通与协调。在确保系统间兼容工作的同时,为国际任务间交互支持提供可能;针对现行通信标准中月球探测方面的尚未明确之处,应积极参与国际协调,提升话语权。
4 结 论
本文提出了一种多器联合月球极区探测任务通信系统方案。该方案基于一套由月球中继通信网络和月面通信网络组成的链路构架,通过异构链路互为备份、多中心节点等方式实现了系统的可靠性与可扩展,兼顾了系统内的资源优化配置。基于多器联合月球极区探测任务需求分析,针对通信系统多址接入方式等关键环节开展设计工作,并给出工程实施建议,相关成果可为我国未来月球极区探测,乃至月面科研站等大规模长期驻留任务通信系统设计提供参考,具有良好的工程应用前景。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
移动通信(2021年5期)2021-10-25
无线电通信技术(2020年1期)2020-01-15
无线电通信技术(2019年1期)2019-12-24
电子制作(2019年20期)2019-12-04
航空知识(2018年12期)2018-01-11
科技创新导报(2016年27期)2017-03-14
中国科技纵横(2016年14期)2016-10-10
太空探索(2015年1期)2015-07-18
太空探索(2014年12期)2014-07-12