VLBI月球定轨和月面定位技术及其应用
2020-11-12 07:10李培佳胡小工
深空探测学报 2020年4期
黄 勇,李培佳,胡小工,3
(1.中国科学院 上海天文台,上海 200030;2.上海市空间导航与定位技术重点实验室,上海 200030;3.中国科学院 行星科学重点实验室,上海 200030;4.中国科学院 大学天文与空间科学学院,北京 100049)
引 言
我国已发射了“嫦娥1号”(CE-1)、“嫦娥2号”(CE-2)、“嫦娥3号”(CE-3)、“嫦娥5号”载入返回飞行试验器(CE-5T1)和“嫦娥4号”(CE-4,包括中继星和探测器)多颗月球探测器,实现了绕月飞行和落月探测[1-6]。即将发射的“嫦娥5号”(CE-5)探测器是我国探月工程三期任务的重要部分,将执行采样返回任务,后续我国还将实施探月四期任务,对月球极区进行重点考察[7]。
我国的月球和深空探测任务采用测距测速和甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)联合测轨的模式[8]。VLBI测轨分系统由上海处理中心和位于上海(25m、65 m)、北京(50 m)、昆明(40 m)和乌鲁木齐(25 m)的VLBI台站组成[9]。上海天马65 m天线于2012年建成使用,从CE-3任务开始,上海主用天马65 m天线,佘山25 m天线备用。
从CE-1到目前的CE-4任务,VLBI测轨技术处于不断进步中。CE-1采用天文处理方法,对探测器采用单通道处理模式,频率为S波段;在CE-2中,VLBI仍然沿用CE-1的信标设计,实时任务期间,实现了综合采用S/X波段数据能力;CE-2任务期间VLBI开展了X波段双差分单向测距(delta Differential One-way Ranging,ΔDOR)测量实验数据处理(事后处理);基于CE-2的ΔDOR处理经验,在CE-3任务中首次实现了处理系统自动消除模糊度,提供实时ΔDOR处理数据的能力,并确立了5 min射电源和探测器快速差分观测的测量模式[10]。CE-4中继星则首次采用S波段ΔDOR观测处理技术。整体来看,我国探月工程VLBI测量的精度从CE-1的约10 ns水平提高到CE-3/CE-4的优于1 ns水平[6]。美国、欧洲深空探测器的ΔDOR测量精度最好可以优于0.1ns[9],我国的VLBI测轨精度仍有很大提升空间。表1为我国的历次月球探测任务中VLBI测量数据定轨后精度统计,随着观测设备硬件和软件的提高,测量精度也逐渐提高。
随着探月任务的进展,我国地面无线电测距测速技术也有了很大提升。目前我国已经建设了3个深空站,分别为佳木斯(66 m)、喀什(35 m)和南美洲阿根廷萨帕拉(35 m),构成了中国深空网(Chinese Deep Space Network,CDSN),对月球和深空探测器测距精度优于1 m,测速精度优于1 mm/s。另外,青岛、喀什、圣地亚哥等地的12m、18 m天线也在继续使用[8]。
探月工程中测量数据的处理与定轨预报及定位计算主要由北京航天指挥控制中心(简称北京中心)、西安卫星测控中心(简称西安中心)以及VLBI测轨分系统VLBI中心(简称VLBI中心)的3套独立计算机软、硬件系统承担。本文对VLBI在月球探测任务测定轨定位中的应用进行系统介绍。

表1 历次任务VLBI定轨精度统计Table 1 Accuracy statistics of VLBI orbit determination for previous missions
1 控后轨道快速恢复
我国绕月探测工程由“嫦娥1号”卫星、“长征3号”甲(CZ-3A)运载火箭、西昌卫星发射场、测控系统和地面应用系统等5大系统组成。CE-1卫星是我国首颗月球探测卫星,其主要科学目标是:获取月球表面三维影像;分析月球表面有用元素及物质类型的含量和分布;探测月壤厚度;探测地月空间环境。VLBI测轨分系统与统一S波段(Unified S-Band,USB)系统共同完成CE-1发射段以外各个阶段的测轨任务。2007年10月24日,CE-1卫星在西昌卫星发射中心顺利升空,CE-1卫星发射后的飞行轨道按照轨道特征包括调相24 h轨道段、调相48 h轨道段、地月转移轨道段、月球捕获轨道段和环月飞行轨道段。
参加CE-1卫星测轨任务的地面观测站包括:喀什站、青岛站、智利CEE站、欧洲航天局(European Space Agency,ESA)库鲁站、ESA新诺舍站、中国“远望2号”测量船、“远望3号”测量船,以及上海、北京、昆明和乌鲁木齐4个VLBI测站。VLBI测站从调相24 h轨道段开始正式观测,智利CEE站跟踪到地月转移轨道段,CEE退出观测后ESA站进行了后续观测,主要是库鲁站,新诺舍站只有约0.5 h数据。远望测量船每天跟踪弧段约为1~2 h。
探测器要经过多次轨道控制才能达到预定轨道,每次轨道控制后需要快速计算控后轨道,评估轨控效果。数据分析表明,相比于测距测速数据单独定轨,VLBI数据加入后可以显著提高控后轨道确定精度,以CE-1地月转移轨道第1次变轨控后30 min(表2)/3 h(表3)短弧定轨为例,将事后长弧定轨结果作为参考,考察测距测速数据单独定轨(方案1)和测距测速联合VLBI定轨(方案2)提供的轨道根数精度。
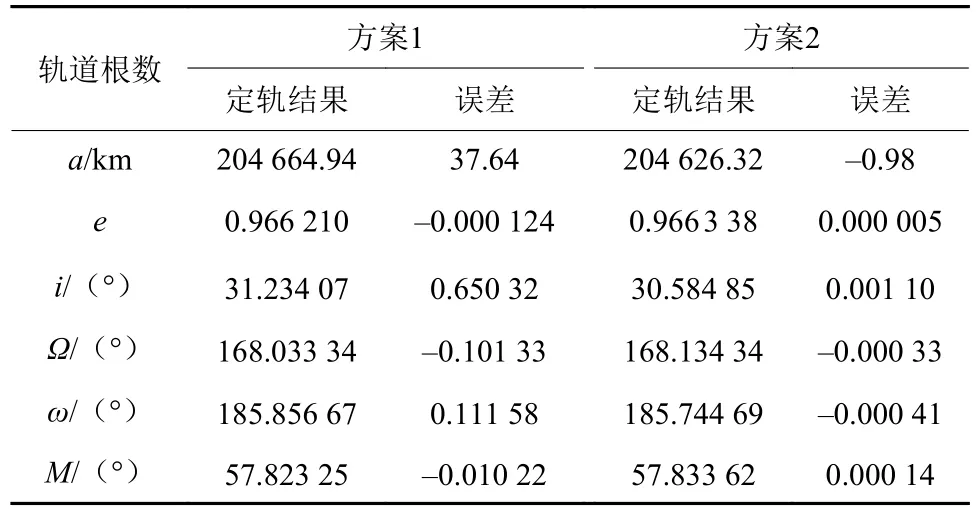
表2 CE-1控后30 min短弧定轨比较Table 2 CE-1 30 min orbit determination result

表3 CE-1控后3 h短弧定轨比较Table 3 CE-1 3 h orbit determination result
由上述30 min/3 h短弧段定轨分析可以看出:①VLBI数据的加入对短弧定轨精度有1~3个数量级上的提高,特别是表征横向精度的几个角度量精度提高尤为显著;②USB(S波段测距测速数据)+VLBI联合30 min短弧定轨精度优于USB数据单独3 h定轨精度。主要是因为USB技术同一时间只有一个站进行测量,星地距离远,观测几何差,单独利用USB数据短弧定轨精度较差。
2 地月转移段和环月段定轨
与CE-1、CE-2任务相比,CE-3任务在轨道设计和测量方面的主要技术状态变化:
1)地月转移段末期一次近月制动为环月100 km轨道;
2)100 × 15 km环月轨道段在15 km近月点实施动力下降;
3)实施月面软着陆,开展月面巡视探测;
4)佳木斯深空站、喀什深空站X频段测控设备首次正式参加任务;
5)干涉测量采用差分单向测距(Differential One-way Ranging,DOR)、双差分单向测距(ΔDOR)和同波束干涉(Same Beam Interferometry,SBI)测量模式;
6)开展喀什、佳木斯和三亚3站的X频段三向测量精度验证;
7)开展深空网的DOR、ΔDOR和SBI等干涉测量试验。
轨道计算过程中涉及到的动力学摄动模型包括:①JGM3地球重力场模型,奔月段选取10 × 10阶;②JGL165p1月球重力场模型,对于100 × 100 km环月轨道选取100 × 100阶,对于100 × 15 km环月轨道选取165 × 165阶;③N体摄动考虑日、地、月和大行星;④太阳辐射压摄动。
VLBI在地月转移段和环月段定轨中发挥了重要作用。CE-3任务第一次中途修正(TCM1)控前6 h定轨时,因为卫星刚刚升空,尚未进入VLBI测控范围,所以仅有测距测速数据,定轨结果位置误差在9 km,速度误差1.67 m/s;而在控前3 h定轨时,VLBI 4台站中有3台站(天马、北京、昆明)可视,可视弧长约2 h,控前3 h联合位置误差好于百米。分析结果表明,这2 h的VLBI数据极大提高了定轨预报精度,如表4所示。

表4 CE-3第1/2次中途修正和近月制动控前3/6 h预报精度Table 4 CE-3 3/6 h prediction accuracy before maneuver
12月6日17时47分,CE-3利用7 500 N发动机实施了近月制动,发动机工作时间约6 min,17时53分,近月制动结束,CE-3进入一条距离月面100 km高的绕月圆轨道飞行,4 d后,10日21时20分,CE-3又实施了降轨机动,将近月点轨道高度调整至15 km,远月点高度为100 km,为动力落月做准备。
采用重叠轨道方法评估了100 × 100 km轨道的定轨精度,对100 × 100 km轨道,每24 h进行一次轨道确定,重叠弧段长度为2 h(约1个卫星轨道周期),使用的观测数据为VLBI数据联合测距数据,定轨后测距残差均方根(Root Mean Square,RMS)约为0.48 m,VLBI时延残差RMS约为0.37 ns,时延率残差约为0.50 ps/s。重叠弧段分析结果统计如表5所示。

表5 CE-3 100 × 100 km重叠弧段精度Table 5 CE-3 100 × 100 km orbit determination accuracy
根据轨道演化,CE-3轨道逐渐由通视状态(卫星轨道面与地月连线方向垂直)转向非通视状态(卫星轨道面与地月连线方向平行),一般情况下通视状态下定轨精度要高于非通视状态,表5也反映出了这种趋势,非通视状态下定轨精度差的主要原因包括月球背面遮挡,地面站和轨道面几何构形差以及月球背面重力场误差影响等。
计算结果表明,对CE-3探测器100 × 100 km环月轨道,单独使用测距数据进行轨道确定,定轨精度约为80 m。加入VLBI数据后,定轨精度有较大提高,尤其是T和N方向提高较为明显。此外,在通视状态下由于测距数据单独定轨精度已经较高,所以VLBI数据加入后定轨精度提升不明显;而在非通视状态下,VLBI数据加入后定轨精度显著提高,与CE-2和日本的“月亮女神”(SELenological and ENgineering Explorer,SELENE)探测器对环月段定轨精度的分析结论一致。
3 着陆器和巡视器定位
CE-3于2013年12月14日21时开始动力下降,持续时间约12 min。CE-3落月后,星上测距信标和DOR信标在着陆1 h后关闭,之后着陆器上搭载的定向天线数据传输信号打开并实时向地面传输两器分离过程以及科学数据。落月后VLBI天线不再观测射电源,不能高精度标校系统误差,因此VLBI时延精度下降,再加上数传信号切换的影响,落月后三向测距和VLBI测量数据的有效时间约为1 h[4]。
分别分析了单独利用测距测速数据(R&D)以及测距测速数据联合VLBI数据(R&D+VLBI)两种情况下的着陆器定位精度,并与美国“月球勘测轨道器”(Lunar Reconnaissance Orbiter,LRO)给出的着陆器位置进行比较,比较结果如表6所示。可以看出,加入VLBI后,CE-3着陆器的定位精度从km量级提高到几十m。

表6 CE-3着陆器定位精度Table 6 CE-3 lander position accuracy
同波束VLBI测量的基本原理是利用天线的主波束同时接收角距很小的两个或多个探测器的信号,得到两个或多个探测器信号的相关相位并在探测器间进行差分,两个探测器的时延差分即为同波束VLBI的时延观测量。由于两器角距离较近,可以消除传播路径中电离层、大气以及观测装置的绝大部分影响,得到的差分时延数据比传统的单探测器VLBI时延测量精度更高。从测量原理上,同波束VLBI对两个探测器的相对位置有较强的约束能力[7]。
同波束VLBI是CE-3巡视器相对定位的唯一地面测量手段,根据处理方法不同可以得到差分相时延和差分群时延两种类型的数据。差分群时延测量精度约为1 ns;差分相时延的噪声精度约为1 ps,但是存在ns量级的测量模糊度,该模糊度可以在相对定位中予以解算。分别利用差分群时延和差分相时延计算得到的相对位置和视觉定位比较的结果,差分群时延相对定位结果差异约为百米量级,而差分相时延结果差异在1 m左右。
4 CE-2拓展任务小行星探测阶段定轨
CE-2于2011年6月8日开始了拓展试验,拓展试验的主要内容是对日地系L2点进行深空探测,以验证我国测控网的深空测控能力。2011年8月25日,经历了两个多月的奔L2点飞行,CE-2探测器进入了绕日地系L2点飞行的Lissajous轨道。
2012年4月15日,CE-2探测器在轨控下飞离绕日地L2点的Lissajous轨道,开始了再拓展试验,主要是对“4 179号图塔蒂斯”(4 179 Toutatis)小行星进行探测,这是我国进行小行星探测试验的开端。2012年12月13日,CE-2探测器在距离地球690万km处与Toutatis小行星交会,交会时CE-2星载监视相机对小行星进行了光学成像,事后对照相数据分析表明,CE-2飞越Toutatis时,两者最近相对距离达到3.2 km,这是国际上首次实现对该小行星近距离探测[11]。
CE-2飞越小行星时距离地球已达700万km,由于其近乎直线的特殊轨道特征,导致其轨道计算精度较绕月飞行阶段要低1~2个数量级,高精度的轨道产品是保证小行星探测试验中的精准轨控和高质量小行星拍照成像的前提,因此如何提高CE-2测定轨精度是测控系统在小行星探测试验面临的最大挑战。
深空探测中的转移轨道是一种特殊类型的轨道,其轨道特征一般为大椭圆轨道或者双曲线轨道。CE-1和CE-2的地月转移轨道是以地球为中心的大椭圆轨道(偏心率超过0.9),CE-2奔日地L2点和小行星的转移轨道也基本上是以地球为中心的大椭圆轨道。限制转移轨道计算精度的主要因素有:
1)USB测量精度降低,USB测距噪声从约1 m(50万km以内)增大到约5 m(150万km);
2)VLBI测量精度没有明显降低,但是VLBI数据轨道卫星轨道的约束随着距离增大而降低;
3)随着卫星距离增大,地基测轨数据的定轨几何变差,定轨误差增大;
4)偏心率接近1的大椭圆轨道特征导致参数相关性强,不利于定轨。
美国、欧洲等的深空探测转移轨道,一般都采用无线电测距测速和差分测量(差分单向多普勒(Differential One-way Dopler,DOD)/差分单向测距,VLBI相结合的测定轨方式,以满足轨道测控精度,转移轨道的定轨精度相对于绕飞轨道仍相差1~3个数量级。
小行星探测试验期间的定轨计算策略与拓展试验期间类似,但是在定轨弧长的选择上进行了调整。小行星探测试验期间定轨计算采用6周弧长定轨策略,即每次精密轨道计算采用6周弧长的测轨数据,每周进行1次定轨。与拓展试验期间的定轨弧长选取的策略相比,数据弧长由4周增加至6周。这是因为随着探测器远离地球,轨道几何确定逐渐变差,需要更长的测轨数据获取稳定的轨道。
为了进一步分析VLBI数据对定轨的贡献,对2012年6—8月探测器奔小行星的测量数据进行了分析,分别使用测距单独定轨和联合VLBI数据定轨2种策略,定轨弧长6周,然后对计算的精密轨道与基准轨道进行比较。基准轨道为综合两个月长弧的数据定轨解算。
图1为定轨结果比较,单独使用测距数据6周弧长定轨计算误差约为5~8 km,综合VLBI数据后定轨结果为1~3 km,VLBI数据的加入可以将定轨精度有效提高1~2倍。

图1 CE-2小行星探测阶段定轨精度比较Fig.1 Orbit accuracy for CE-2 asteroid exploration phase
进一步的计算分析表明,长弧段的测距数据定轨也可以提高定轨精度,当测距数据增加到2个月时,其与综合VLBI数据定轨结果偏差约2 km。为了达到综合测距和VLBI数据定轨精度,需要增加测距观测跟踪弧长,结果表明VLBI数据的加入可以缩短定轨所需弧长,在有限的观测条件下有效提升定轨精度。
VLBI在奔向地月L2点和小行星过程中发挥了重要的测定轨作用,VLBI测轨分系统先后参加了多次关键弧段(月球逃逸、中途修正、L2点轨道捕获等)的实时观测任务,和每周两次的长管跟踪任务;L2捕获段VLBI数据的加入可以显著提高定轨精度,为了判断捕获是否达到预期目标进行的8 h短弧定轨,仅使用测距测速定轨位置误差约为100 km,速度误差为1.2 m/s,是此次变轨的速度增量(3.58 m/s)的30%,不能满足评估轨控效果的要求。加入VLBI数据后,定轨精度提高至12 km,速度误差为0.14 m/s,仅为此次变轨的速度增量(3.58 m/s)的3%,可以满足轨控后精度评估指标。随着飞行器距地球距离的增加,VLBI测定轨技术的贡献更为明显,在关键弧段加入VLBI观测数据,可以在量级上提高定轨精度,表明在后续的深空探测任务中VLBI是必不可少的测控手段。
5 地月L2点定轨
地月L2点位于地月连线的延长线上,能够连续地对地球和月球背面保持通讯,并且具有较好的光照条件,很少被天体遮挡。同时,在地月L2点无明显的中心引力体约束,在长期任务中维持轨道所需能量较少。我国CE-5T1和CE-4中继星均到达过地月L2点,CE-4中继星是世界上首颗在地月L2点Halo轨道长期运行的探测器[6]。
探月工程“嫦娥4号”包括中继星和着巡组合体(以下简称着巡体),着巡体在月球背面着陆,开展巡视探测任务。中继星在地月L2点绕飞,建立月地通信链路,CE-4中继星于2018年5月利用CZ-4C火箭在西昌发射,着巡体于2018年12月利用CZ-3B火箭在西昌发射。CE-4中继星经过发射段(运载火箭发射到星箭分离前)、地月转移段(星箭分离到近月制动前)、月球−地月L2点转移段(近月制动到月球借力进入地月L2点转移轨道,到L2点捕获)和地月L2点使命轨道段4个飞行时段,最终围绕在地月L2点的Halo轨道上运行,在整个飞行过程中,中继星要进行多次轨道机动。
由于地月L2点为不稳定点,且探测器在飞行过程中受到多种摄动和误差因素的影响,需要定期进行轨道控制才能保证探测器在L2点附近的长期稳定运行。CE-5T1在地月L2飞行期间,大约不到2个星期会进行一次大的轨道机动,CE-4约1个星期进行一次轨道机动。
在CE-2/CE-3绕月球飞行期间,轨道周期约为2 h,一般定轨弧长取1 d即可达到100 m的定轨精度。但是在探测器绕L2飞行期间,由于无较强的中心天体引力,其轨道的动力学约束明显弱于绕月球飞行轨道,在轨道计算时表现为轨道参数存在较强的相关性,因此为保证定轨精度,需要采用较长时间的定轨弧段。
在CE-5T1绕L2飞行期间,综合利用5~7 d的测距测速和VLBI数据,CE-5T1在L2点的定轨位置和速度精度分别百米和mm/s量级,轨道误差主要反映在横向方向。分析结果还表明,测距测速和VLBI数据联合定轨可以有效提高定轨精度,单独利用测距测速数据定轨精度约为千米量级。
对于CE-4中继星,在S波段测量条件下,测距、测速、VLBI时延和时延率的定轨后残差分别约为0.53 m、0.37 mm/s、1.16 ns和0.67 ps/s,CE-4中继星是我国月球探测器首次采用S波段ΔDOR技术,测量精度比之前同样采用S波段测轨的CE-1/CE-2/CE-5T1有明显的提升。分析结果表明VLBI的加入有助于提高L2点轨道的定轨和预报精度,中继星绕L2点定轨精度最好可达100 m,速度精度约为1 mm/s。VLBI测量数据的加入可以显著提升定轨和预报精度,尤其是较短弧段的定轨,对于相同时间的VLBI观测而言,VLBI观测时间段越靠后,轨道预报的精度越高。
6 环月双目标定轨
CE-5预计2020年年底在海南发射场利用大推力“长征5号”(CZ-5)运载火箭发射,CE-5将实现月面采样返回探测任务。CE-5包括轨道器、上升器、着陆器和返回器等多个探测器,是我国最复杂的航天任务之一。在交会对接过程中,上升器将通过多次变轨,最终实现和轨道器对接,月球轨道交会对接是CE-5任务和未来我国载人登月工程的关键技术之一。
同波束VLBI测量已成功应用于CE-3任务中的巡视器和着陆器相对定位,以及日本“月亮女神”(Selene),等月球探测计划[4,7]。在CE-5任务中,将利用同波束技术对轨道器和上升器两个动态目标进行观测。
SELENE探月计划由3个卫星组成:在距月面100 km极轨圆轨道飞行的三轴稳定主卫星Kaguya、绕椭圆轨道飞行的两个自旋稳定小卫星Rstar和Vstar。SELENE计划中测控跟踪任务主要由日本国内的UDSC深空站和日本的VERA网完成;在卫星入轨等关键弧段使用3个美国国家航空航天局(National Aeronautics and Space Administration,NASA)的深空网(Deep Space Network,DSN)深空站对卫星系统进行跟踪观测[12]。所有的观测数据都由SELENE数据处理中心(SELENE Operation data Analysis Center,SOAC)进行处理。SELENE的测量模式包括地面对主卫星和两颗小卫星的双程测距和双程多普勒测量、地面对主卫星和Rstar的4程多普勒测量,以及对Rstar和Vstar的同波束VLBI测量(表7)。定轨分析结果表明同波束VLBI数据的加入对提高探测器定轨精度有较大贡献,对于测距数据较少的Vstar探测器,同波束VLBI数据的加入使得其定轨精度相比较测距单独定轨提高了近一个量级,与Rstar定轨精度相当。

表7 Rstar和Vstar的同波束VLBI测量Table 7 Same beam VLBI measurement of Rstar and VSTAR
在CE-5交会对接远程导引段,上升器从月面起飞后,经过多次变轨,逐步接近轨道器。轨道器在约200 km高度圆轨道飞行,上升器在2 d时间内通过多次变轨,轨道高度逐步抬高到约210 km,这个过程中轨道器和上升器的轨道面基本一致。在交会对接远程导引段有较多的同波束VLBI观测机会,特别是在后段,两个器逐步接近。
利用仿真数据分析了同波束VLBI技术在探月工程三期CE-5任务交会对接远程导引段中的测定轨应用。同波束VLBI技术可以实现同时多个探测器的测量,差分相时延的测量精度要比传统的VLBI时延数据提高2~3个数量级,有助于提高探测器的定轨精度特别是两个探测器间的相对定轨精度。
选取了长弧定轨和短弧定轨典型算例,分析结果表明,同波束VLBI数据联合地基测距测速数据,可以实现对轨道器和上升器的高精度联合定轨,利用10 ps精度的同波束VLBI数据可以将两个探测器间的相对轨道精度提高到1 m,可用于支持月球轨道器和上升器的交会对接过程,而且同波束数据越多,定轨精度越高。
7 结 论
我国探月工程从CE-1、CE-2、CE-3到目前正在执行的CE-4任务,VLBI测轨技术处于不断进步中,测量精度逐步提升,极大地促进了我国月球探测器的定轨定位精度,本文选取历次探月任务的典型算例,分析了VLBI数据对定轨定位的贡献。VLBI数据在月球探测的各个阶段,包括地月转移段、环月段、月面工作段均能发挥重要作用,可以提高探测器的定轨定位精度,特别是对控后短弧定轨精度贡献尤其显著,在拉格朗日点以及小行星探测定轨中也发挥了重要作用。综合利用测距测速和VLBI数据对CE-3环月段定轨精度可达20 m,着陆器定位精度优于100 m,同波束VLBI技术是巡视器相对定位的唯一地面测量手段,CE-3巡视器相对定位精度在1~2 m。
我国后续月球和深空探测将继续应用VLBI技术,VLBI技术也将进一步发展,在未来的CE-5任务中,还将实施动态双目标VLBI测量,支持交会对接远程导引段的定轨预报精度,后续探月四期还将发展月球轨道VLBI技术。VLBI将在我国未来深空探测中发挥更重要的作用。
致 谢
感谢北京航天飞行控制中心和航天工程研究所提供的支持,感谢VLBI测轨分系统团队的帮助。
猜你喜欢
数学杂志(2022年5期)2022-12-02
导航定位学报(2022年4期)2022-08-15
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年19期)2019-11-23
小学科学(2019年12期)2019-01-06
太空探索(2014年1期)2014-07-10
太空探索(2014年9期)2014-07-10