
北斗双频和三频相对定位精度分析
2020-11-11 09:46刘洋
江西测绘 2020年3期
刘洋
( 宁波市阿拉图数字科技有限公司 浙江宁波 315000)
1 引言
北斗卫星导航系统是GNSS 中唯一一个所有工作卫星都播发三频信号的导航定位系统,北斗多频观测信号的设计,使北斗多频组合定位更加灵活多样[1]。随着北斗系统的不断发展,其定位模式更加多样化,有单点定位、差分定位、相对定位以及精密定位等[2]。目前,北斗系统已经被应用于各个领域,而不同领域用到的北斗定位模式也不相同,其中道路导航主要利用单点定位模式,制导以及高精度定位领域主要利用精密定位模式,动态定位以及变形监测主要利用相对定位模式[3,4]。建筑变形监测是保证人们生命财产安全的重要措施,北斗定位技术将是今后主要的监测技术手段,其主要利用北斗的超短基线以及短基线相对动态单历元定位技术[5,6]。对于北斗相对定位技术,很多专家学者对其进行了研究分析,文献[7]分析了北斗相对定位精度,发现10km 长度的北斗相对定位平面精度优于2.5cm,竖直方向精度优于5cm,三维定位精度略低于GPS;文献[8]分析了北斗三频中长基线定位性能,发现北斗三频定位有效提高固定率和缩短收敛时间,提高了定位精度;文献[9] 分析了北斗三频载波相对定位精度,发现当基线超过20km 时,北斗三频相对定位相比于单频定位提升了很多,最多提升了71.4%;文献[10]分析了GPS/BDS 组合相对定位精度,发现GPS/BDS 组合情况下相比于单系统增加了卫星数与改善了卫星空间结构,在中长基线下BDS 与GPS 定位精度相当,组合情况下相比于单系统定位精度得到了有效提升,并且更加稳定。
为进一步分析北斗相对定位精度,本文首先详细推导了双频与三频组合相对定位算法,然后以IGS 连续跟踪站组成的超短基线与短基线为基础,分析了不同双频组合以及三频组合的北斗相对定精度以及模糊度固定情况。
2 北斗双/三频相对定位算法
北斗系统利用伪距观测值与载波相位观测值进行定位相对定位属于高精度定位,主要利用载波相位观测值进行定位,双频和三频载波相位定位公式如下。
2.1 双频载波定位模型
在进行短基线载波相对定位时,利用的定位模式是双差载波相位定位模式,公式如下[6]:

根据式(1)进行双频线性组合,如下:

2.2 三频载波定位模型
在利用北斗三频组合方式进行相对定位时,依然采用载波双差模型,根据公式(1)得到三频载波双差定位模型如下[11]:


根据公式(4)进行最优系数的选取,构建载波双差观测值方程组,求解出三个整周模糊度,最后利用卡尔曼滤波进行参数估计,得到接收机的坐标。
3 数据处理分析
为详细分析北斗双频组合与三频组合的相对定位精度,本文选取了由IGS 连续跟踪站组成的两条不同长度的基线进行相对定位精度分析。第一条基线为YARR 站与YAR3 站组成的超短基线,基线长度为 111m,YARR 站的接收机天线类型为LEIAT504,YAR3 站的接收机天线类型为LEIAR25;第二条基线为BUR2 站与RHPT 站组成的短基线,基线长度为4.28km,BUR 站的接收机天线类型为LEIAT504 ,RHPT 站接收机天线类型为LEIAT504。观测时间为2018 年11 月11 日00:00:00-24:00:00,采样频率为30s,一共2880 个历元,卫星可用性与卫星天空轨迹如下图2 所示。

图1 卫星可用性

图2 卫星天空轨迹
如图1 所示,所选IGS 连续跟踪站都可以接收到北斗二号所有卫星的观测数据,并且每个观测历元都有可用北斗卫星数据。如图2 所示,每种轨道卫星的运行轨迹不同,主要集中在亚太地区上空。
为使解算结果更加可靠,在进行北斗相对定位数据处理之前先计算得到这四个连续跟踪站的真值,利用GAMIT 对联合CUT0 站和PERT 站所构成的基准网进行解算并且进行平差,精度如表1。

表1 四个站精度统计表
如表1 所示,经过解算平差后四个连续跟踪站三个方向的精度都为mm,即满足相对定位精度要求。
3.1 超短基线相对定位
分析北斗超短基线相对定位精度时,主要通过分析B1/B2、B1/B3、B2/B3 和B1/B2/B3 四种组合下每个历元的三维坐标误差、模糊度固定情况以及RMS 值。

图3 超短基线三维坐标误差
如图3 所示,对不同频率组合的超短基线相对定位三维坐标误差统计发现,B1/B2 组合频率下,E方向和N 方向的误差在1cm 以内,U 方向的误差在4cm 以内;B1/B3 组合频率下,E 方向和N 方向的误差在1cm 以内,U 方向的误差在4cm 以内;B2/B3 组合频率下,E 方向的误差在9cm 以内,N 方向的误差在20cm 以内,U 方向的误差在100cm 以内;B1/B2/B3 组合频率下,E 方向的误差在0.4cm 以内,N 方向的误差在0.5cm 以内,U 方向的误差在1.5cm 以内。
进一步统计各组合频率超短基线相对定位的RMS 值与模糊度固定率。

表2 超短基线相对定位精度统计
如表2 所示,B1/B2 组合和B1/B3 组合E 方向和N 方向的RMS 值优于0.4cm,U 方向的RMS 值为1cm;B2/B3 组合E 方向RMS 值优于3cm,N 方向RMS 值优于6cm,U 方向RMS 值优于20cm;B1/B2/B3 组合E 方向的RMS 值优于0.1cm,N 方向三维RNS 值优于0.2cm,U 方向的RMS 值优于0.6cm。在模糊度固定方面,B1/B2 组合、B1/B3 组合与B1/B2/B3 组合下模糊度固定率基本一致,在98%以上,B2/B3 组合频率下的整周模糊度固定率较差,只有80%。
综上可以发现,B2/B3 组合下噪声太大,定位精度不能满足相对定位精度要求,而B1/B2 和B1/B3组合的定位精度基本一致,B1/B2/B3 组合相比于双频组合,三个方向的相对定位精度有了很大的提升,其中E 方向最大提升了76%,N 方向最大提升了56%,U 方向最大提升了49%。
3.2 短基线相对定位
在进行短基线相对定位精度分析时,所分析的指标与超短基线分析的精度指标一样。
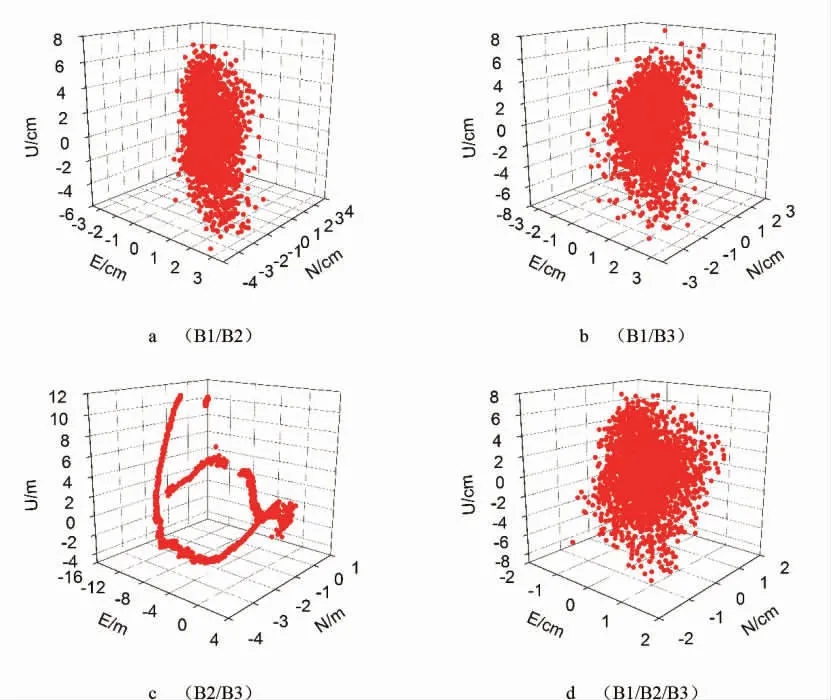
图4 短基线三维坐标误差
如图4 所示,对不同频率组合的短基线相对定位三维坐标误差统计发现,B1/B2 组合频率下,E 方向的误差在3cm 以内,N 方向的误差在4cm 以内,U方向的误差在8cm 以内;B1/B3 组合频率下,E 方向和N 方向的误差在3cm 以内,U 方向的误差在8cm以内;B2/B3 组合频率下,E 方向的误差在12m 以内,N 方向的误差在4m 以内,U 方向的误差在16m以内;B1/B2/B3 组合频率下,E 方向的误差和N 方向的误差在2cm 以内,U 方向的误差在8cm 以内。
进一步统计短基线的RMS 值与模糊度固定率。
如表3 所示,B1/B2 组合和B1/B3 组合E 方向RMS 值在1cm 左右,N 方向的RMS 值优于1cm,U方向的RMS 值优于2.5cm;B2/B3 组合三个方向的RMS 值过大,大于1m;B1/B2/B3 组合E 方向的RMS值优于0.9cm,N 方向三维RNS 值优于0.8cm,U 方向的RMS 值优于2cm。在模糊度固定方面,B1/B2 组合与B1/B2/B3 组合下模糊度固定率基本一致,模糊度固定率为99%,B1/B3 组合模糊度固定率为50%,B2/B3 组合频率下的整周模糊度固定率最差,只有50%。

表3 短基线相对定位精度统计
综上可以发现,B2/B3 组合下噪声太大,定位精度与单点定位精度差不多,不能满足高精度相对定位精度要求,而B1/B2 和B1/B3 组合的定位精度基本一致,B1/B2/B3 组合相比于双频组合,三个方向的相对定位精度有了很大的提升,其中E 方向最大提升了21%,N 方向最大提升了18%,U 方向最大提升了24%。
4 结论
本文针对北斗三频信号以及相对定位精度,分析了北斗双/三频组合下的超短基线以及短基线相对定位精度,经研究分析结论如下:
(1)利用北斗双频组合定位时,B1/B2 组合与B1/B3 组合的相对定位精度一致,且模糊度固定率也一致,B2/B3 组合下观测噪声过大,模糊度固定率过低,不能进行高精度相对定位。
(2)利用北斗B1/B2/B3 三频组合定位时,相对定位精度相比于双频组合定位有了很大的提升,其中模糊度固定率与B1/B2 组合、B1/B3 组合下的模糊度固定率一致。
(3)三频组合相对定位精度相比于双频组合定位精度,超短基线情况下定位精度提升明显优于短基线情况下,其中超短基线精度提升在50%以上,短基线精度提升在20%左右。
目前本文只分析了超短基线与短基线情况下北斗双/三频相对定位,接下来需进一步分析中长与长基线情况的相对定位精度。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
科学(2020年5期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2018年5期)2018-12-05
制造技术与机床(2018年10期)2018-10-13
电机与控制学报(2018年9期)2018-05-14
雷达学报(2017年1期)2017-05-17
