
基于改进指数趋近律的机械臂控制器设计
2020-11-10 11:21梁骅旗陆畅
中阿科技论坛(中英阿文) 2020年8期
关键词:机械臂
梁骅旗 陆畅

摘要:针对机械臂控制系统广泛应用的滑模控制策略,存在抖振幅度大、对外界干扰敏感等问题,提出改进指数趋近律的滑模控制器。该策略采用干扰观测器对机械臂的建模误差及外部扰动实时监测;基于饱和函数,提出了一种改进指数趋近律;在此基础上设计滑模控制律,用Lyapunov方程验证系统的可到达性。仿真结果表明,该控制器能快速跟踪给定信号,减小系统抖振,有效地克服外界干扰,提高机械臂的控制性能。
关键词:机械臂;干扰观测器;改进趋近律
中图分类号:TP241 文献标识码:A
机械臂具有灵活程度高、可靠性好、生产效率高的特性。因此,机械臂已在农业采摘、机械装配、医疗健康等领域普遍应用。但是,由于机械臂是一类多输入多输出系统,存在非线性、强耦合性的特征,这些因素增加了精确控制的难度[1-2]。滑模控制策略因具有稳定性好、响应速度快、适应性强等优点,在机械臂系统中得到普遍应用[3]。文[4]用离散函数来改进趋近律,有效弱化抖振对系统影响,但到达滑模面的时间变长;文[5]采用双幂次函数改进幂次趋近律,提高了机械臂的跟踪速度,弱化了抖振的影响,但跟踪效果有待改进。张俊辉[6]等提出对采用饱和函数替代符号函数改进指数趋近律,跟踪效果良好,抖振削弱明显,但存在跟踪速度较慢的问题。
本文综合考虑上述问题,针对机械臂控制存在抖振、跟踪速度慢和对外部干扰敏感等问题,提出了一种基于改进指数趋近律的滑模控制器。利用改进趋近律减小滑模抖振,提高跟踪速度;同时,干扰观测器对不确定因素进行监测,在Matlab仿真平台验证了该控制器的可行性与有效性。
1 机械臂数学建模
将一个刚性二关节的机械臂作为研究对象,可建立基于拉格朗日运动学的机械臂数学模型如式(1)所示。
由于系统存在外部干扰信号,在设计过程中引入干扰观测器来处理外部干扰,使其能有效地跟踪给定位置qd,假设以下条件成立:
假设1 给定位置qd及其n阶导数是存在且有边界的。
2 趋近律设计
式(2)中的函数,在初始状态可以以较快的速率靠近滑模面,但是在向原点靠近的过程中,速率会变慢,不能保证在有限的时间内到达原点,造成系统的抖振现象,减小跟踪精度,对系统造成损伤。因此本文对该趋近律进行了改进,使其同时兼顾控制精度与抖振的削弱。
改进后的指数趋近律为:
在式(3)中,引入s2可以加快趋近律靠近原点的速度,使正常运动段的时间缩短;用改进的sat(s)取代sgn(s),其中,θ为抖振指数,ω为精度指数,调整θ的大小可以有效弱化抖振对系统的影响,但会使系统准确度下降。因此通过调整ω大小,可以保证抑制抖振的同时,提高系统的精度。
下面对系统稳定性进行分析:
3 滑模控制器设计
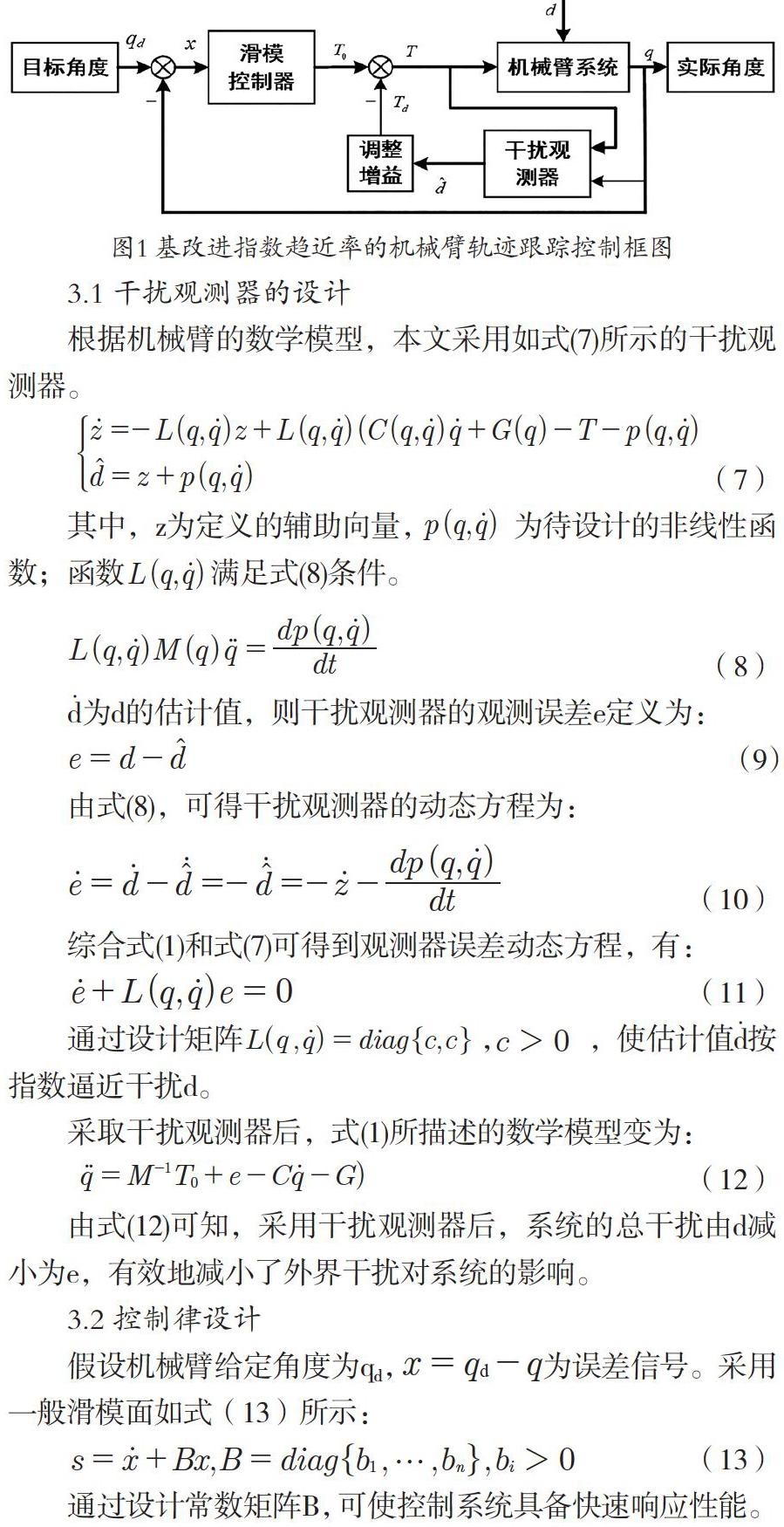
控制器的系统框图如图1所示,系统主要由滑模控制器、机械臂系统、干扰观测器等部分组成,。在控制系统正常工作时,向控制器输入一个期望角度qd,期望角度qd与实际输出角度q作差会产生误差信号x,用基于改进指数趋近律的滑模控制器来处理误差信号x,经过滑模控制器处理会产生控制力矩T0,与干扰观测器处理后的输出力矩Td作差,即可得到系统的控制力矩T,将T输入机械臂中,实现对整个系统的控制。
对于机械臂系统工作时存在外部干扰d,可以将其分为两部分进行处理:对于可观测部分(内部摩擦),可以采用干扰观测器进行实时监测;对于不可观测部分(随机外部干扰)。则采用改进指数趋近律来进行补偿。
3.1 干扰观测器的设计
根据机械臂的数学模型,本文采用如式(7)所示的干扰观测器。
本文的仿真研究方案为:为说明改进指数趋近律的滑模控制器较一般指数趋近律有较好的轨迹跟踪能力和抗抖振能力,就轨迹跟踪、位置跟踪误差两方面进行比较分析。
比较图2a和图2b可分析,采用一般指数趋近律的滑模控制器,关节1、关节2在初始状态的的曲线波动较大,在3s之后才能较好地跟踪给定曲线且曲线抖振较为明显,控制效果较差;采用改进指数趋近律的滑模控制器,双关节的在0.5s左右就能较好地跟踪给定轨迹且曲线抖动不明显,有较好的控制效果,说明改进指数趋近律能够增加系统的轨迹跟踪速度,减小系统抖振。
由图3a、图3b的误差曲线可以分析,采用一般指数趋近律的系统双关节误差波动很大,系统不能稳定跟踪给定轨迹,采用改进指数趋近律的系统在1s以后跟踪误差几乎为0,跟踪速度快且抖振小。
5 结论
针对多关节机械臂滑模控制存在抖振大、跟踪速度慢、受外界干扰影响大的问题,本文设计了改进指数趋近律的滑模控制策略。在设计控制器的过程中,干扰观测器对外界可观测的干扰进行观测,改进指数趋近律可以有效提高系统轨迹跟踪速度,减小系统跟踪误差,保证系统的安全性和稳定性。仿真分析表明,改进后的控制器能快速跟踪给定信号,减小系统抖振,有效地克服外界干扰,提高机械臂的控制性能。
(责任编辑:侯辛锋)
参考文献:
[1]张俊辉,刘斌,蒋峥,等.基于改进趋近律的滑模控制在机械臂中的应用[J].高技术通讯,2018,028(006):534-546.
[2]梁骅旗,米根锁.基于干扰观测器的机械臂改进趋近律的滑模控制[J].测控技术,2019,038(001):140-144.
[3] Kumar J, Kumar V, Rana K P S. Efficient reaching law for SMC with PID surface applied to a manipulator[C].//Ghaziabad. In: Proceedings of the IEEE Computational Intelligence on Power,, Energy and Controls with Their Impact on H-manity. Ghaziabad,India, 2017.:51-56.
[4]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1995.
[5]梅红,王勇.快速收敛的机器人滑模变结构控制[J].信息与控制,2009,38(5):552-557.
[6]張俊辉,刘斌,蒋峥,等.基于改进趋近律的滑模控制在机械臂中的应用[J].高技术通讯,2018,028(006):534-546.
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19
