利用激光点云数据检测特征表面平整度
2020-11-09 03:14赵玉臣谢宏全徐家骏孙权张镇
科技创新与应用 2020年32期
关键词:平整度
赵玉臣 谢宏全 徐家骏 孙权 张镇
摘 要:针对传统的平整度测量方法工作效率较低、检测精度不高,导致平整度计算结果误差较大等问题。近年来,三维激光扫描技术应用于平整度测量引起了相关学者的关注,选取学校海洋楼墙面作为研究对象,利用徕卡C10三维激光扫描仪获取特征表面的激光点云数据并对数据进行预处理,运用Matlab、Excel等软件计算出墙面的平整度。研究结果表明:利用三维激光扫描技术测量特征表面的技术方法是可行的,具有速度快与精度高的特点,同时能够得到直观的不平整区域显示效果。
关键词:平整度;激光点云数据;Matlab;特征表面
中图分类号:P258 文献标志码:A 文章编号:2095-2945(2020)32-0122-02
Abstract: For the traditional flatness measurement method is low efficiency, detection accuracy is not high, resulting in the flatness calculation results error is large. In recent years, the application of 3D laser scanning technology to flatness measurement has aroused the concern of relevant scholars, selected the school ocean wall as the research object, used Leica C10 3D laser scanner to obtain the laser point cloud data on the feature surface and pre-processthed the data, using Matlab, Excel and other software to calculate the flatness of the wall. The results show that the technical method of measuring the characteristic surface using 3D laser scanning technology is feasible, has the characteristics of high speed and precision, and can obtain the intuitive uneven area display effect.
Keywords: flatness; laser point cloud data; Matlab; characteristic surface
引言
随着中国城市建设的快速发展,针对高层或超高层建筑物墙体平整度检测是建筑安全检查的重要组成部分。随着测量新技术的发展,将三维激光扫描技术应用到特征表面平整度检测成为新的研究方向。国内学者进行了相关研究,主要有:李广等[1]在采用FARO X330获取激光点云数据的基础上,利用Geomagic Qualify软件完成平面拟合并计算出平整度;李杰等[2]利用FARO Focus 3D获取不同材质墙面的激光点云数据,采用Matlab软件编程计算出平整度;程效军等[3]运用最小二乘拟合的方法检测墙面平整度;李伟等[4]利用地面三维激光扫描技术进行了道路平整度的研究;本文使用徕卡C10扫描仪获取校园内海洋楼墙面的激光点云数据,运用Cyclone与Matlab等软件对点云数据进行处理,计算墙面平整度。
1 激光点云数据获取与预处理
1.1 激光点云数据获取
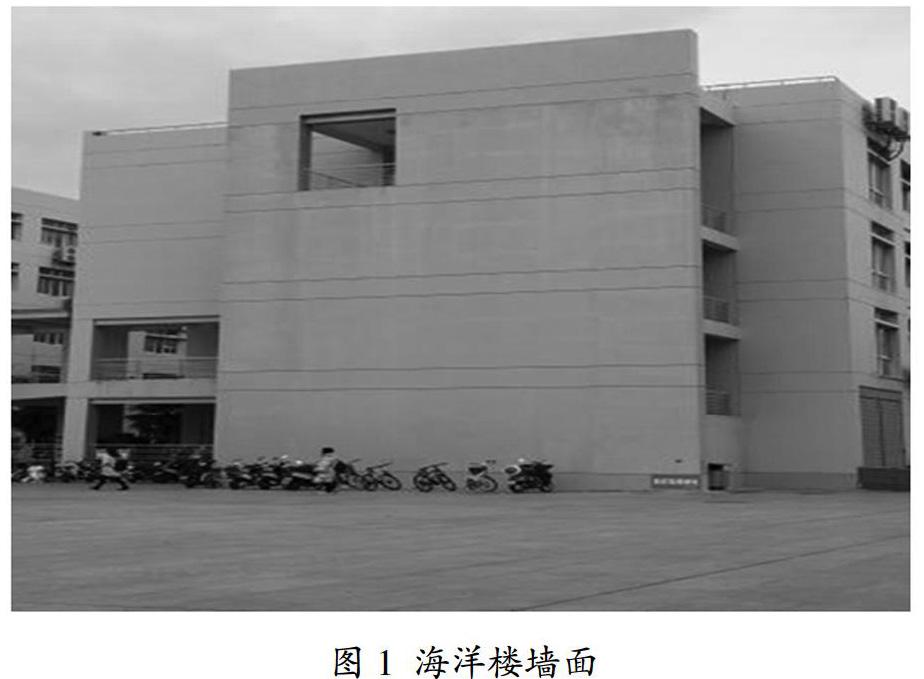
依据本试验研究的数据质量需要,研究对象选择校园内海洋楼的东侧墙面(图1),扫描面积约为30m2。使用徕卡C10三维激光扫描仪,激光点云数据获取的主要步骤如下:(1)在距离墙面大约15m的位置架设仪器并整平。利用窗扫描确定扫描对象的大概矩形范围,选择低分辨率进行预扫描,依据扫描结果可以多次调整,直到预期的扫描范围。(2)预扫描达到预期范围后切换至分辨率界面,将分辨率调整为用户自定义,对特征表面进行测距得到仪器到特征表面的距离,输入试验前确定的分辨率(2cm),然后开始扫描。依据扫描后显示的点云效果,判断合格后,插入U盘传输数据,仪器关机扫描结束。
1.2 激光点云数据预处理
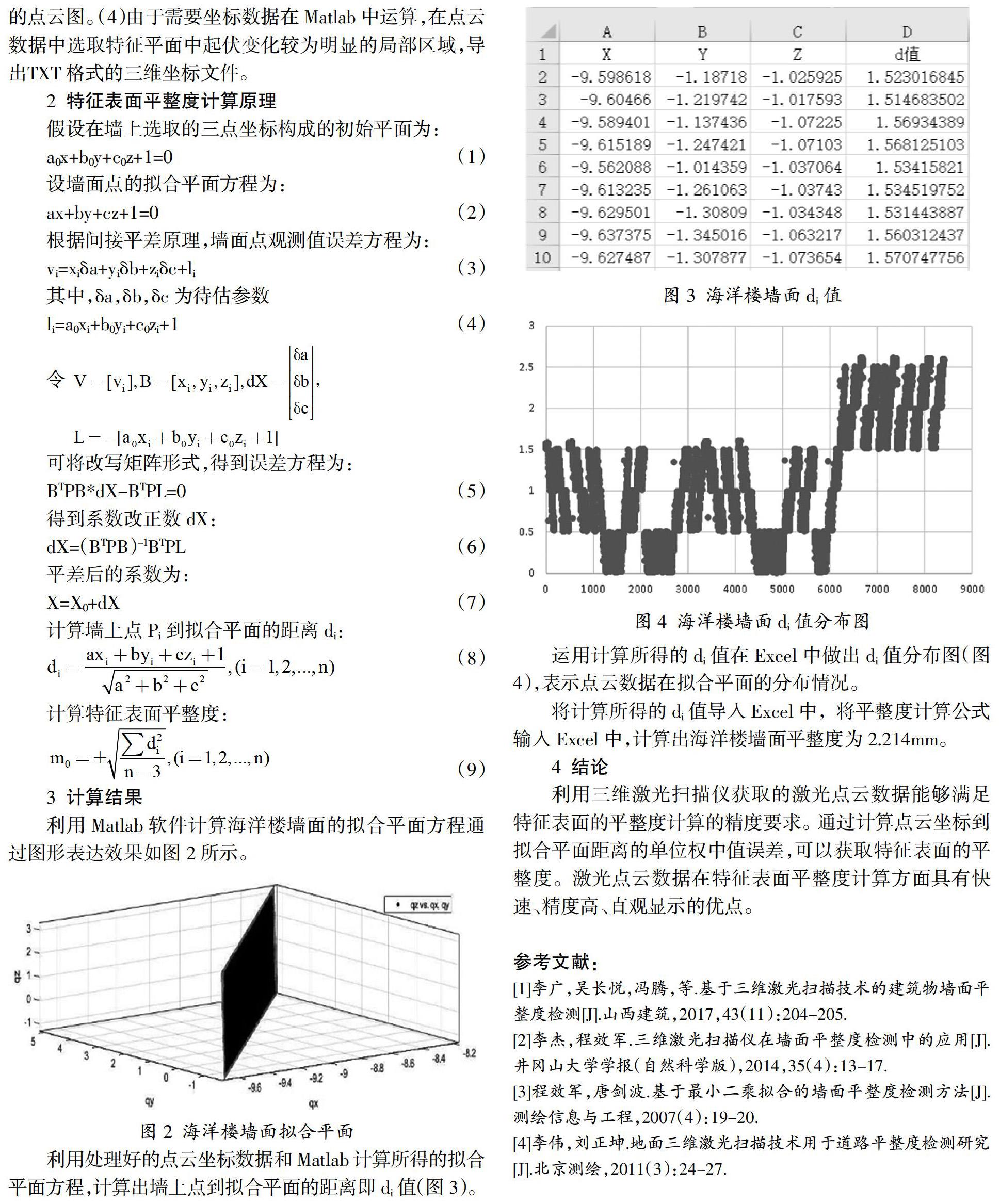
将U盘中的扫描数据拷贝到实验室联想图形工作站,使用仪器配套的Cyclone软件进行预处理,主要步骤如下:(1)新建数据库,并将扫描获得的点云数据导入其中。(2)对点云数据进行去噪,首先使用框选方法大面积删除不需要的点云数据。然后继续对点云数据进行小范围的去噪,删除完成后即得到目标点云。(3)通过点云的统一化获取所需要的点云间隔,点云间隔设置为20cm,得到抽稀之后的点云图。(4)由于需要坐标数据在Matlab中运算,在点云数据中选取特征平面中起伏变化较为明显的局部区域,导出TXT格式的三维坐标文件。
2 特征表面平整度计算原理
3 計算结果
利用Matlab软件计算海洋楼墙面的拟合平面方程通过图形表达效果如图2所示。
利用处理好的点云坐标数据和Matlab计算所得的拟合平面方程,计算出墙上点到拟合平面的距离即di值(图3)。
运用计算所得的di值在Excel中做出di值分布图(图4),表示点云数据在拟合平面的分布情况。
将计算所得的di值导入Excel中,将平整度计算公式输入Excel中,计算出海洋楼墙面平整度为2.214mm。
4 结论
利用三维激光扫描仪获取的激光点云数据能够满足特征表面的平整度计算的精度要求。通过计算点云坐标到拟合平面距离的单位权中值误差,可以获取特征表面的平整度。激光点云数据在特征表面平整度计算方面具有快速、精度高、直观显示的优点。
参考文献:
[1]李广,吴长悦,冯腾,等.基于三维激光扫描技术的建筑物墙面平整度检测[J].山西建筑,2017,43(11):204-205.
[2]李杰,程效军.三维激光扫描仪在墙面平整度检测中的应用[J].井冈山大学学报(自然科学版),2014,35(4):13-17.
[3]程效军,唐剑波.基于最小二乘拟合的墙面平整度检测方法[J].测绘信息与工程,2007(4):19-20.
[4]李伟,刘正坤.地面三维激光扫描技术用于道路平整度检测研究[J].北京测绘,2011(3):24-27.
猜你喜欢
科学与财富(2022年4期)2022-07-16
建筑建材装饰(2016年9期)2016-12-29
中国科技纵横(2016年15期)2016-12-29
居业(2016年9期)2016-12-26
现代企业文化·理论版(2016年20期)2016-12-20
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年21期)2016-10-17
科技视界(2016年1期)2016-03-30
科技视界(2015年25期)2015-09-01
卷宗(2013年2期)2013-05-14