
电机械制动系统硬件在环仿真分析平台设计
2020-11-06 18:24吴萌岭雷驰
现代城市轨道交通 2020年10期
吴萌岭 雷驰

摘 要:EMB系统是一种全新的制动系统。在其设计初期,为避免地面试验所产生的高额费用,同时保证试验结果的可靠性,采用硬件在环仿真分析平台。该平台由仿真部分和硬件部分组成,仿真部分包括列车模型和人机交互界面,硬件部分主要由 8 个电机械制动装置和 2 个基于 NI-PXI 的制动控制器组成,利用数据采集卡和 MVB 网络实现仿真部分与硬件部分的信号传输。试验结果表明,该平台能够较好地模拟 EMB 系统的制动行为,为系统的设计开发提供一定的支持。
关键词:轨道交通;EMB 系统; HIL;建模;仿真;分析平台;设计
中图分类号:U270.35
电机械制动系统(EMB)是一种全新的制动系统,在开发设计过程中,针对制动力控制、制动力分配、防滑控制等问题,需要大量的试验数据进行支撑。在传统的空气制动系统设计中,部分研究人员通过线路试验获取试验数据,以验证研究结果。但在真实列车上进行制動测试需要大量的资源,如硬件(火车、线路等)、能源、人力和财力,以及一些与制动相关的参数,如闸瓦摩擦系数、列车运行阻力、黏着系数等,很难达到要求的设定值。另外,制动系统是一个复杂的非线性系统,若基于纯仿真研究,在建模过程中需要对仿真模型进行简化,导致仿真结果存在失真的可能。为克服线路试验和纯仿真的不足,本文介绍一种EMB系统硬件在环(HIL)仿真分析平台,其列车和线路条件由仿真模型提供,成本远低于线路试验;其制动系统是真实的硬件,能够充分考虑制动系统的复杂性和非线性,可以提供更可靠的试验结果。
1 HIL仿真分析平台硬件组成及工作原理
EMB系统HIL仿真分析平台的结构拓扑及实物分别如图1和图2所示。该试验台的组成及工作原理概括如下。
(1)整个仿真分析平台由仿真部分、硬件部分以及数据采集卡/MVB网络组成。
(2)试验台仿真部分由基于Labview编程的人机交互界面(GUI)以及基于MATLAB/Simulink编程的列车系统模型和电制动模型组成,界面与模型均搭载于试验台中的一部工控机上。仿真部分的主要作用是为验证试验提供虚拟列车(1动1拖,2节编组)、虚拟的列车运行环境以及电制动力,同时还具备显示、保存试验数据的功能。
(3)试验台硬件部分包括司机控制器和EMB系统。其中司机控制器用于产生制动指令。EMB系统主要包括2个制动控制器和8个电机械制动装置,其主要功能是为虚拟车辆提供所需的电机械制动力。制动控制器的硬件基于NI-PXI实时仿真控制器实现,软件基于Labview编程实现。在试验时,制动控制器根据列车系统模型提供的轴速、载重等信息实时计算目标制动力;之后向电制动模型申请电制动力,根据电制动反馈计算所需的电机械制动力;制动控制器根据电机械制动力计算结果控制电机械制动装置获得实际电机械制动力,并将其提供给虚拟的列车(列车系统模型);最后虚拟的列车在电机械制动力和电制动力的共同作用下完成减速制动。
(4)数据采集卡/MVB网络部分主要用于工控机与制动控制装置之间的数据通信。为模拟真实车辆,所有信号的电器特性均与真实列车相同。轴速信息为脉冲量信号,其通信基于工控机中的NI-PCI-6602和制动控制装置中的NI-PXI-6602脉冲量采集卡实现;制动指令、轴重、电机械制动力、电制动请求、电制动反馈等信息为电压型模拟量信号,其通信基于工控机中的NI-PCI-6224和制动控制装置中的NI-PXI-6621模拟量采集卡实现。MVB网络作为工控机与制动控制装置的另一种通信方式,用于通信的备份。
2 软件组成
图1中的仿真部分在仿真分析平台的工控机中运行,其中列车系统模型和电制动模型基于MATLAB/Simulink搭建,而GUI使用Labview编程语言开发。GUI与底层模型的数据交互通过National Instrument公司提供的仿真接口工具包(NI-SIT)实现。
2.1 列车系统模型
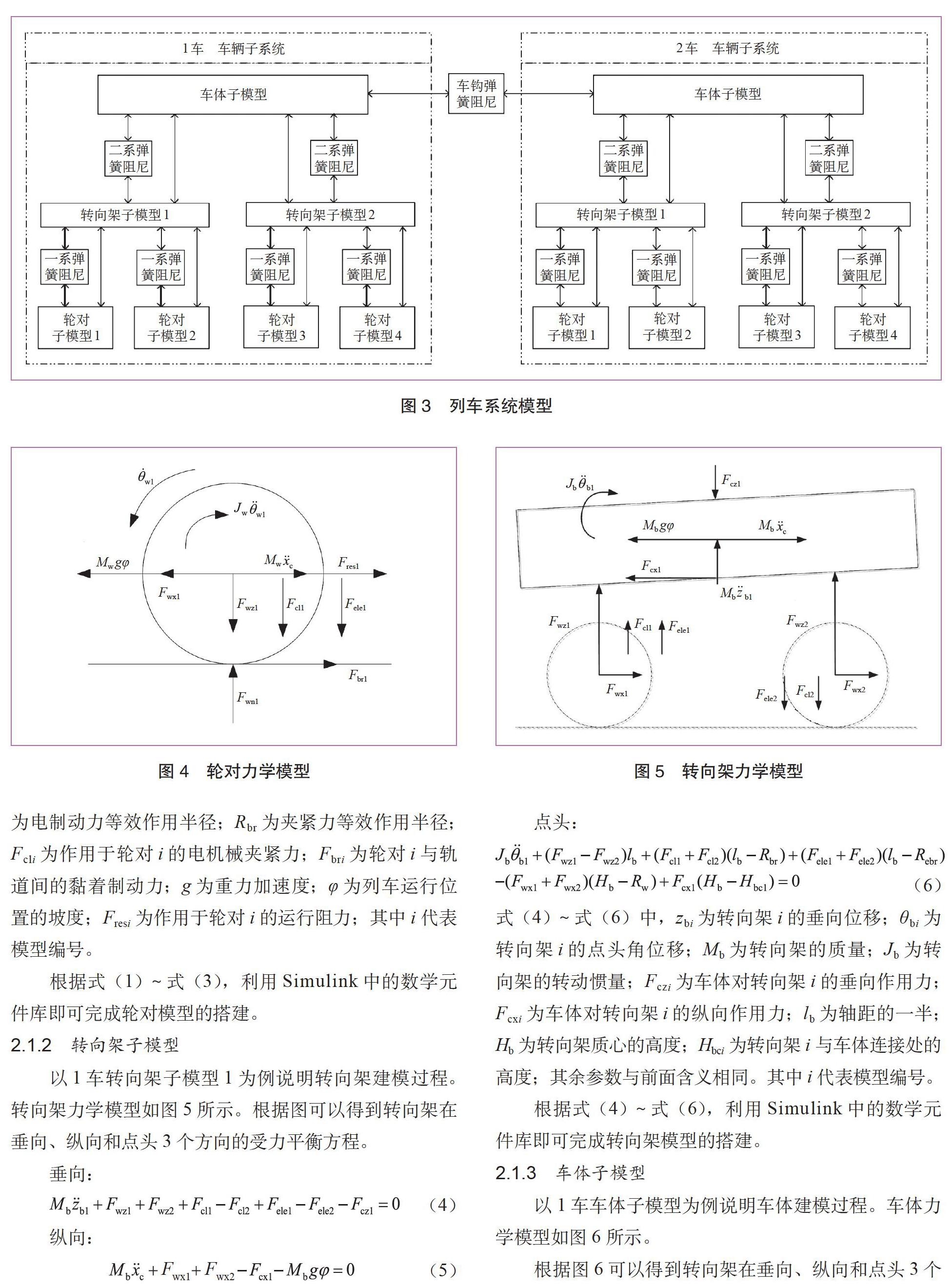
列车系统模型由1动1拖2节车的模型组成,其中动车模型包含电制动模型。由于制动过程主要与车辆的垂向、纵向和点头自由度有关,为节省计算资源,在建模过程中,忽略车辆的伸缩、侧滚和摇头自由度。列车系统模型如图3 所示,主要包括轮对子模型、转向架子模型、车体子模型和弹簧子阻尼模型。
2.1.1 轮对子模型
以1车轮对子模型1为例说明轮对建模过程。轮对力学模型如图4所示。为简化建模,将车辆运行阻力平均分布到各轮对的轴心。
根据图4可以得到轮对在垂向、纵向和转动3个方向的受力平衡方程。
式(1)~式(3)中,为车辆纵向加速度;为轮对 的转动角速度;Mw为轮对质量;Jw为轮对转动惯量;Fwxi为转向架对轮对i的纵向作用力;Fwzi为转向架对轮对i的垂向作用力;Fwni为钢轨对轮对i的垂向作用力; Felei为作用于轮对i的电制动力;Rw为车轮半径;Rebr为电制动力等效作用半径;Rbr为夹紧力等效作用半径;Fcli为作用于轮对i的电机械夹紧力;Fbri为轮对i与轨道间的黏着制动力;g为重力加速度;φ为列车运行位置的坡度;Fresi为作用于轮对i的运行阻力;其中i代表模型编号。
根据式(1)~式(3),利用Simulink中的数学元件库即可完成轮对模型的搭建。
2.1.2 转向架子模型
以1车转向架子模型1为例说明转向架建模过程。转向架力学模型如图5所示。根据图可以得到转向架在垂向、纵向和点头3个方向的受力平衡方程。
式(4)~式(6)中,zbi为转向架i的垂向位移;θbi为转向架i的点头角位移;Mb为转向架的质量;Jb为转向架的转动惯量;Fczi为车体对转向架i的垂向作用力;Fcxi为车体对转向架i的纵向作用力;lb为轴距的一半;Hb为转向架质心的高度;Hbci为转向架i与车体连接处的高度;其余参数与前面含义相同。其中i代表模型编号。
根据式(4)~式(6),利用Simulink中的数学元件库即可完成转向架模型的搭建。
2.1.3 车体子模型
以1车车体子模型为例说明车体建模过程。车体力学模型如图6所示。
根据图6可以得到转向架在垂向、纵向和点头3个方向的受力平衡方程。
式(7)~式(9)中,zc为车体的垂向位移;θc为车体的点头角位移;Mc为车体的质量;Jc为车体的转动惯量;Fcpfront为前车钩对车体的纵向作用力(1车为零);Fcprear为后车钩对车体的纵向作用力;Hc为车体质心的高度;Lc为转向架中心距的一半;其余参数与前面含义相同。
根据式(7)~式(8),利用Simulink中的数学元件库即可完成车体模型的搭建。
2.1.4 弹簧阻尼子模型
车辆的一系、二系悬挂以及车钩均可视为弹簧阻尼。弹簧阻尼力学模型如图7所示。
根据图7的弹簧阻尼受力分析可得:
式(10)中,Fz为弹簧阻尼内力;Ksp为弹簧的刚度;z1 为弹簧阻尼上端的位移;z2为弹簧阻尼下端的位移;Cdp为阻尼系数。
根据式(10),利用Simulink中的数学元件库即可完成弹簧阻尼模型的搭建。
2.1.5 列车系统模型
完成轮对、弹簧阻尼、构架、车体的Simulink建模工作后,将这些子模型的输入输出相连即可建立车辆子系统模型。车辆子系统由4个轮对子模型、2个转向架子模型、6个弹簧阻尼子模型(其中4个代表一系悬挂,2个代表二系悬挂)和1个车体子模型组成。
将2个车辆子系统通过弹簧阻尼子模型相连,即可构成列车系统模型。
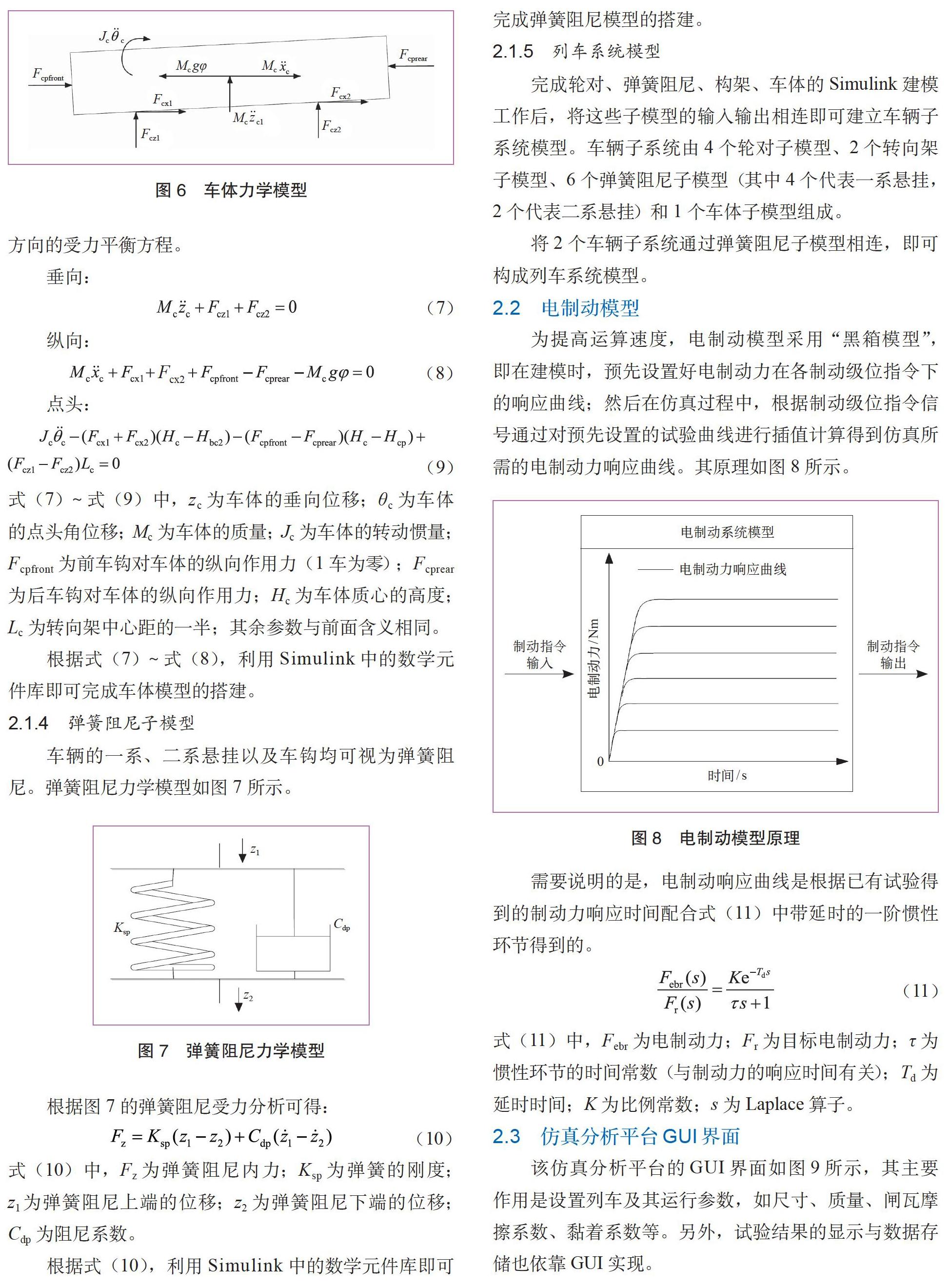
2.2 电制动模型
为提高运算速度,电制动模型采用“黑箱模型”,即在建模时,预先设置好电制动力在各制动级位指令下的响应曲线;然后在仿真过程中,根据制动级位指令信号通过对预先设置的试验曲线进行插值计算得到仿真所需的电制动力响应曲线。其原理如图8所示。
需要说明的是,电制动响应曲线是根据已有试验得到的制动力响应时间配合式(11)中带延时的一阶惯性环节得到的。
式(11)中,Febr为电制动力;Fr为目标电制动力;τ为惯性环节的时间常数(与制动力的响应时间有关);Td为延时时间;K为比例常数;s为Laplace算子。
2.3 仿真分析平台 GUI 界面
该仿真分析平台的GUI界面如图9所示,其主要作用是设置列车及其运行参数,如尺寸、质量、闸瓦摩擦系数、黏着系数等。另外,试验结果的显示与数据存储也依靠GUI实现。
3 试验结果
一次列车分级制动的试验结果如图10所示。图10a为列车速度与减速度试验曲线。由图可知,HIL仿真平台的虚拟列车可以很好地模拟列车的制动过程,其根据制动指令进行减速;在接近停车时,实际减速度出现的波动是由电制动退出所引起的,符合列车制动的实际工况。图10b为仿真制动过程中列车第1台转向架前轴的制动力,包括电制动力和电机械制动力。在车速较高且目标减速度较低的情况下,电制动力可以提供列车所需的全部制动力,因此电机械制动力不起作用。而当制动指令提高或车速降低到一定值时,电制动力不足以提供全部的制动力,由电机械制动力开始补充制动力。这也符合真实的制动工况。
4 结语
为降低试验成本,同时保证试验结果的可靠性,本文针对EMB系统建立了一套HIL仿真分析平台。该平台利用列车系统模型和电制动模型模拟了真实的列车及其运行环境,在一定程度上避免了昂贵的线路试验;另外,设计了功能丰富的GUI,便于研究人员配置车辆参数、设置试验参数以及分析试验数据。试验结果表明,本文设计的HIL仿真分析平台能真实有效地模拟列车的制动过程,这为EMB系统的设计与开发提供了可靠的试验支撑。
参考文献
[1]W. Wei, Y. Lin. Simulation of a freight train brake system with 120 valves[J]. Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit,2009,223(F1):85-92.
[2]M. Nankyo, T. Ishihara, H. Inooka. Feedback control of braking deceleration on railway vehicle[J]. Journal of Dynamic Systems Measurement & Control,2006,128(2):185-190.
[3]魏偉,刘涛,张军. KZ1型控制阀仿真模型及列车制动性能仿真研究[J].中国铁道科学,2010(1):105-110.
[4]林祜亭,李和平.城轨列车微机控制模拟直通制动系统[J].现代城市轨道交通,2005(2):2-5,65.
[5]李培署,王广凯.城市有轨电车用微机控制直通电空制动系统研制[J].中国铁道科学,2005(2):6-9.
[6]魏伟,赵旭宝,姜岩,等.列车空气制动与纵向动力学集成仿真[J].铁道学报,2012(4):39-46.
[7]吴萌岭,周嘉俊,田春,等.轨道交通制动系统创新技术[J].现代城市轨道交通,2019(7):30-35.
[8]Piechowiak Tadeusz. Pneumatic train brake simulation method[J]. Vehicle System Dynamics,2009,47(12):1473-1492.
[9]S. Specchia, A. Afshari, A. A. Shabana, et al. A train air brake force model: Locomotive automatic brake valve and brake pipe flow formulations[J]. Proceedings of Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit,2013,227(10):19-37.
[10] C. G. Kang. Analysis of the braking system of the Korean high-speed train using real-time simulations[J]. Journal of Mechanical Science & Technology,2007,21(7):1048-1057.
[11] A. Nasr, S. Mohammadi. The effects of train brake delay time on in-train forces[J]. Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit,2010,1(6):1-12.
[12] 李和平,杨伟君,金哲,等.高速列车制动系统气动仿真平台[J].铁道机车车辆,2011,31(5):89-92.
[13] 伍智敏,任利惠,裴玉春,等.地鐵列车制动系统的中继阀性能仿真[J].城市轨道交通研究,2011,14(9):52-57 .
[14] 杨璨,倪文波,蒋冬清,等.基于AMESim的120紧急阀的建模及仿真分析[J].铁道机车车辆,2009,29(6):37-39.
[15] 陆强,杨美传. 基于AMESim的地铁车辆空气制动系统的建模及仿真[J].液压气动与密封,2011(10):45-48.
[16] 廖志坚,刘争平,王月明. 基于AMESim的动车组制动防滑系统自定义建模与仿真[J].电力机车与城轨车辆,2012,35(4):29-32.
[17] 李邦国,范荣巍,杨伟君,等. 高速动车组制动防滑阀建模与仿真分析[J].铁道机车车辆,2011,31(5):128-131.
[18] 卢明阳. 基于Labview和Simulink的过程控制仿真系统的开发[J].电子制作,2015(16):3-4.
收稿日期 2020-06-24
责任编辑 党选丽
猜你喜欢
科学与生活(2021年24期)2021-12-06
科学家(2021年24期)2021-04-25
科技研究·理论版(2021年20期)2021-04-20
科技研究·理论版(2021年20期)2021-04-20
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
振动工程学报(2019年2期)2019-05-13
现代商贸工业(2016年4期)2016-10-14
建筑工程技术与设计(2015年29期)2015-10-21
经营者·汽车消费报告(2013年5期)2013-06-07
计算机辅助工程(2012年5期)2012-11-21
