向家坝升船机驱动齿轮托架系统运行稳定性分析
2020-11-06 05:50石儒
中国水运 2020年9期
石儒
摘 要:驱动齿轮托架系统作为升船机驱动系统的重要组成部分,与机械传动单元共同承担着升船机船厢的运行工作,其结构组成形式复杂,工作适应性强,主要具有支撑船厢驱动小齿轮、传递小齿轮载荷、适应塔柱和船厢变形从而保持小齿轮与齿条精确啮合、限制小齿轮载荷等功能,齿轮托架系统的安全稳定运行对升船机的安全稳定具有重要的意义。本文对向家坝升船机驱动齿轮托架系统的布置形式、工作原理进行了阐述,并对主要设计载荷以及试通航以来的实际运行载荷进行了分析,得出驱动齿轮托架系统在实际工作中运行是否运行稳定,实际运行中存在的问题,并提出了保证运行最优工况的相关措施。
关键词:升船机;齿轮托架系统;位移适应机构;液气弹簧;载荷;分析
中图分类号:U642 文献标识码:A 文章编号:1006—7973(2020)09-0116-03
向家坝升船机布置在向家坝水利枢纽左岸,采用全平衡齿轮爬升螺母柱保安式一级垂直升船机,由上游引航道、上闸首、船厢室段、下闸首和下游引航道几部分组成,全长约1530米,最大提升高度114.2m。
向家坝升船机齿轮托架系统是船厢运行的重要装置,主要具有支撑船厢驱动小齿轮、传递小齿轮载荷、适应塔柱和船厢变形从而保持小齿轮与齿条精确啮合、限制小齿轮载荷等功能,保证升船机驱动机构安全稳定运行。向家坝升船机2004年开始筹建,2017年9月完成主体设备安装调试,2018年5月26日开始试通航,截止2020年4月27日,已运行3933厢次,过船4044艘,载货1457084.2吨。自试通航以来,升船机共发生2次非检修状态下的安全机构动作,均发生在下游对接时,由于下游水位突变,导致船厢水位变化,此时为对接锁定投入,齿轮托架系统退出状态,齿轮托架机构未动作。
1设备布置与构造
1.1 总体布置
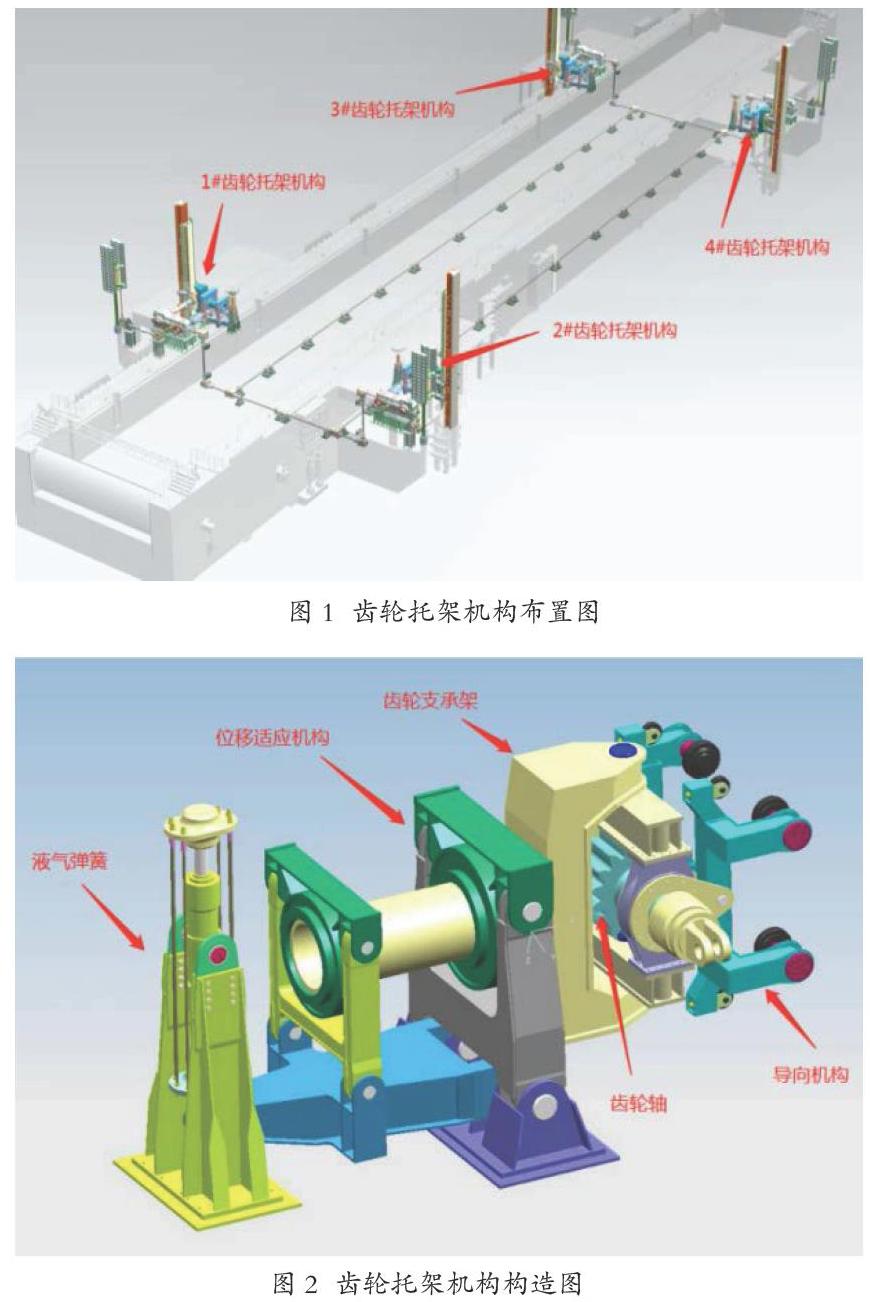
升船机齿轮托架系统属于船厢驱动机构的重要组成部分,与船厢驱动机构布置相对应,4套齿轮托架机构的构造型式完全相同,分别对称布置在船厢两侧四个外伸的侧翼结构上,齿条中心线距船厢横向中心线32950mm,如图1。
1.2 设备构造
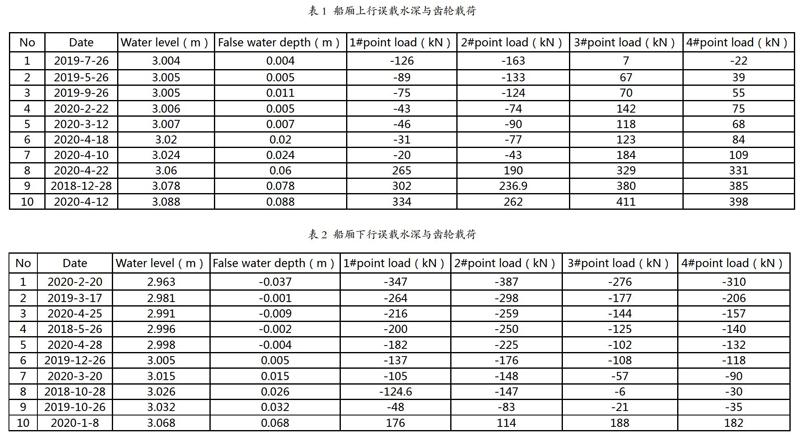
齿轮托架机构由齿轮轴、齿轮支承架、导向机构、位移适应机构、液气弹簧装置等设备组成,如图2。
2工作原理
船厢运行过程中,齿轮受力检测达到550kN(齿轮载荷1100kN)时,监控系统发出齿轮超载报警4类故障,系统不停机;齿轮受力检测达到575kN(齿轮载荷1150kN)时,监控系统发出齿轮超载停机2类故障,驱动控制系统开始电气制动,船厢停止运行,工作制动器和安全制动器上闸,驱动电机断电。
当运行过程中,出现风阻、漏水、安装误差、沉船、地震等情况,未达到监控系统超载停机2类故障时,位移适应机构可以适应船厢与塔柱之间各个方向的相对变位以及齿条的各种安装偏差,其对综合变位的适应能力:横向±120mm,纵向±90mm,齿轮托架机构的位移适应机构通过自身各铰轴连接处轴承的旋转调整横向位移,齿轮与齿条的宽度差调整纵向位移,保持船厢位置水平,保证船厢的安全稳定运行。
当运行过程中,出现风阻、漏水、安装误差、沉船、地震等情况,达到监控系统超载停机2类故障时,系统停机。当小齿轮载荷继续增大,受力检测达到625kN(齿轮载荷1250kN)时,液气弹簧开始动作,安全机构螺纹间隙±60mm处于最大状态,载荷继续增大,安全机构间隙逐渐减小;受力检测达到750kN(齿轮载荷1500kN)时,间隙消失,此时所有载荷由安全机构承担。
3运行稳定性分析
3.1 主要设计载荷
根据升船机设计规范,作用于驱动机构齿轮的载荷主要有船厢误载水体重量、各运动副的摩擦阻力、风阻力、系统惯性力、钢丝绳僵性阻力、船厢与平衡重的不平衡重量等。
3.1.1正常运行最大载荷
正常运行最大载荷是指驱动机构齿轮在正常运行过程中的最大载荷,该载荷的计算主要考虑±10cm误载水重量、正常制动时悬吊系统惯性力、系统摩阻力、船厢与平衡重不平衡重量差等。考虑1.1的载荷不均系数以及设计裕度,每套驱动机构的正常运行最大载荷设计取值为800 kN。
3.1.2停机载荷
驱动机构停机载荷是升船机运行的控制参数,停机载荷按照在驱动机构最大载荷基础上考虑1.25倍的安全系数确定。停机载荷还应计及齿轮轴、万向联轴器、齿轮轴承等部件自重对啮合力的影响,每套驱动机构的停机设计载荷为1150kN。
3.1.3齿轮极限载荷
液气弹簧开始变形时的齿轮载荷:该载荷将高于停机载荷1150kN,通过液压系统的压力阀预先设定,设计为1250kN。
液气弹簧变形终了、齿轮载荷不再增加时的极限载荷:该载荷与安全机构螺纹副间隙值0mm、液气弹簧刚度值、齿轮托架机构的杠杆比、船厢结构刚度等有关,经过设计计算,设计载荷为1500kN。
3.2 实际运行载荷
根据升船机驱动机构长期非连续性往返运行的特点,设计时考虑的各运动副的摩擦阻力、风阻力、系统惯性力、钢丝绳僵性阻力、船厢与平衡重的不平衡重量等驱动机构齿轮的主要载荷在升船机安装完成、额定速度运行时基本上保持恒定不变,在实际运行过程中只考虑误载水体造成的齿轮载荷变化。
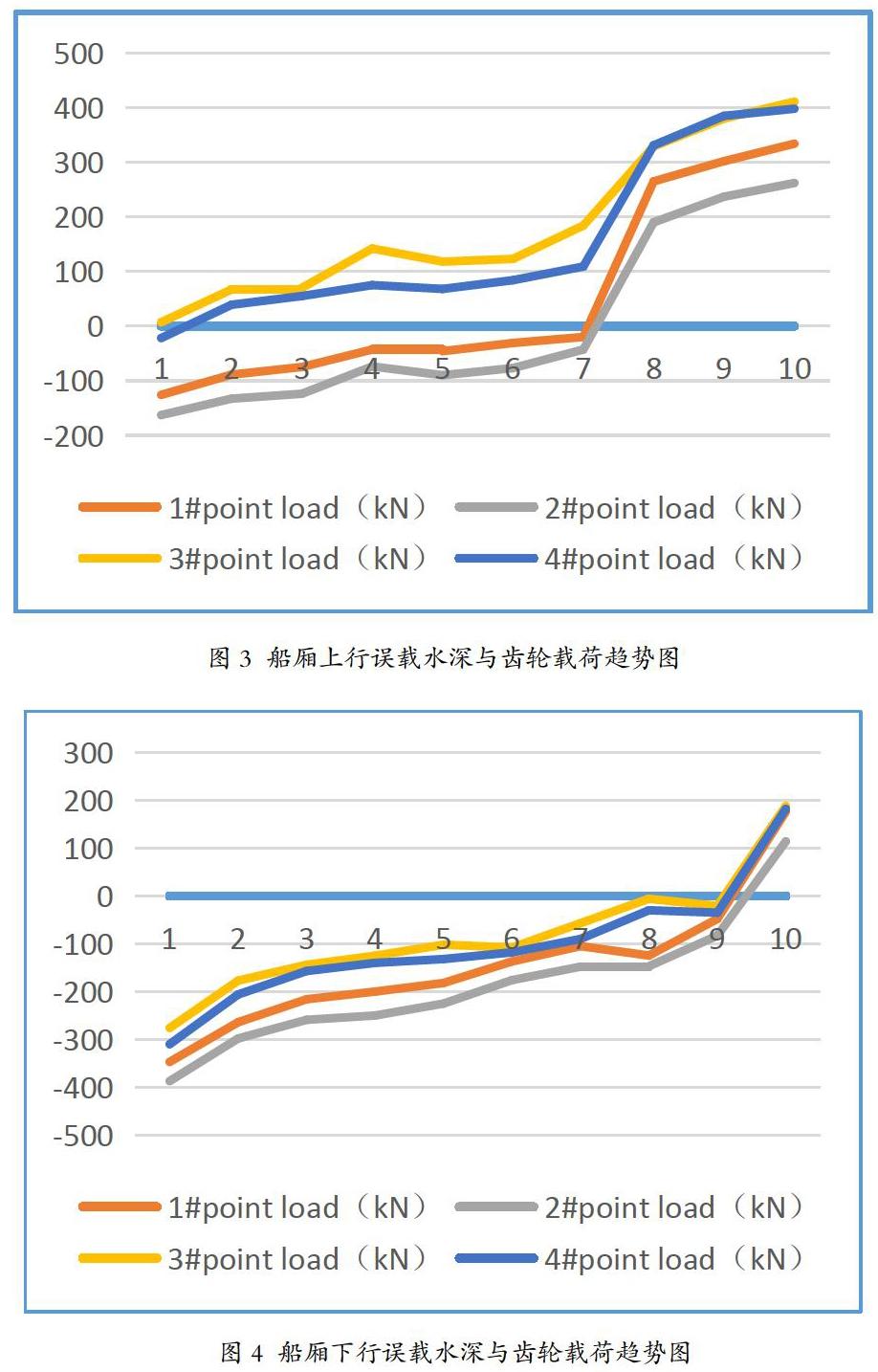
本文随机选取20组船厢在不同运行时段(2018年5月26日-2020年4月28日)对应误载水深下的齿轮载荷数据进行分析对比,10组上行,见表1、图3,10组下行,见表2、图4。
3.3 对比分析结论
通过对上行船厢误载水深与齿轮载荷数据分析,上行时,1#、2#、3#、4#齿轮最大载荷分别为334kN、262kN、411kN、398kN,对应的误载水深为0.088m,船厢可正常运行。随着船厢误载水位变化,4个点小齿轮受力变化趋势相同,在3.02m水深附近时,各点小齿轮受力相对均衡较小。
通过对下行船厢误载水深与齿轮载荷数据分析,下行时,1#、2#、3#、4#齿轮最大载荷分别为-347kN、-387kN、-276kN、-310kN,对应误载水深为-0.037m,此时各点受力均在设计的正常运行载荷范围内,船厢可正常运行。随着船厢误载水位变化,4个点小齿轮受力变化趋势相同,在3.04m水深附近时,各点齿轮受力相对均衡较小。
综合分析,船厢运行过程中,小齿轮实际载荷均在设计载荷范围内,升船机驱动齿轮托架系统运行稳定,船厢运行稳定。通过分析可得出船厢上下行中,小齿轮受力最小时对应的水位分别为3.02m和3.04m,此时应为小齿轮运行的最优工况。为了消除对应的误载水深,保证船厢水位在3m时,为最优工况,可通过平衡重侧加装0.03m误载水深对应的平衡重块,消除不平衡力。
4结果与讨论
通过对向家坝升船机驱动齿轮托架系统不同工况的载荷满足性进行了分析,齿轮托架系统达到了升船机各种工况的安全稳定运行条件。
在升船機运行维护工作中,运行操作人员需要掌握齿轮托架系统运行的最优工况,尽量保证在该状态下运行船厢,维护人员需要做好齿轮托架系统各铰接部位的加油润滑工作;受力部件、螺栓等的检查、紧固工作;机械、金属结构焊缝的检查工作;重要参数、数据的检测测量工作;液压、检测系统的维保工作,如发现问题及时进行调整、更换、修复等工作,保证齿轮托架系统安全稳定运行,同时延长整个驱动机构的寿命。
参考文献:
[1]SL660-2013,升船机设计规范[S].
[2]中国技术研究部.水工机械技术2008年论文集[M].
[3]秦武,金海军,李智,万刚.升船机驱动机构液气弹簧装置的液压控制系统及方法与流程:中国, CN107630870A[P].2017-10-11.
猜你喜欢
科学与财富(2021年36期)2021-05-10
汽车实用技术(2020年3期)2020-03-07
孩子(2020年12期)2020-01-06
科技视界(2019年19期)2019-08-29
科学与技术(2018年5期)2018-11-15
作文评点报·低幼版(2018年17期)2018-07-12
科技视界(2017年6期)2017-07-01
科技与创新(2016年17期)2016-11-04
科技视界(2016年16期)2016-06-29
财经理论与实践(2014年1期)2014-04-02