向家坝升船机船舶吃水和航速检测系统建设
2020-11-06 05:50王向辉
中国水运 2020年9期
王向辉
摘 要:向家坝升船机的承船厢断面系数较小,船舶进出承船厢时的阻塞效应十分明显。相对于船闸,船舶进出升船机承船厢过程船厢内的水面波动更大,吃水、航速一旦超标极易发生船舶触底事故。因此,升船机运行过程中对船舶的吃水、航行速度控制比船闸更为严格。为了尽量降低船舶触底的风险,对通过船舶进行实时吃水和航速检测十分必要。在不影响船舶的正常通航的前提下,对超吃水、超速的船舶及时的预警和制止,有利于减少危险事故的发生,安装船舶吃水及航速检测系统是具有十分重大的现实意义。
关键词:升船机;吃水控制;航速控制
中图分类号:U642 文献标识码:A 文章编号:1006—7973(2020)09-0084-02
向家坝水电站位于四川省宜宾县和云南省水富县交界的金沙江上,是金沙江下游最后一个梯级,以发电为主,同时具备改善航运条件等作用。通航建筑物型式采用齿轮齿条爬升、螺母柱保安式一级垂直升船机,主要由上游引航道、上闸首、船厢室段、下闸首和下游引航道等五部分组成。向家坝升船机最大提升高度114.20米,是目前已建成提升高度最大的升船机。升船机按Ⅳ级航道标准设计,设计代表船型为2×500吨级一顶二驳船队,同时兼顾1000吨级单船,承船厢设计水深3.0米,船舶设计最大吃水2.0米,进出承船厢航速控制在0.5米/秒以内。
向家坝升船机的承船厢长而窄,断面系数较小,船舶进出承船厢时存在比较明显的阻塞效应。与船闸相比,船舶进出升船机承船厢过程中船厢内的水位波动更大,吃水、航速一旦超标极易发生船舶触底事故,危及航行安全。因此,升船机运行过程中对船舶的吃水、航行速度限制更为严格。为了尽量降低船舶触底的风险,对通过船舶进行实时的吃水和航速检测十分必要。在不影响船舶正常通航的前提下,对超吃水、超速的船舶及时的预警和制止,有利于减少海损事故的发生,安装船舶吃水及航速检测系统是具有十分重大的现实意义。
1 工程简介
为2018年向家坝电厂开展了船舶吃水及航速自动检测系统研究并取得了预期的测量精度及目标。本项目拟在该研究基础成果之上,建设2套船舶吃水检测装置、1套船厢富裕水深检测装置、2套航速检测装置以及数据存储系统。
1.1 上游仰扫吃水检测装置
向家坝升船机上游引航道布置有趸船和浮式导航堤,仰扫吃水检测系统计划安装在上游引航道91.3米浮堤上,能够适应上游水位变化,大大减少工程量。仰扫系统利用超声波检测原理,通过水下布置的检测架扫描船底,可以生成船底三维图,精确测定船舶吃水。
1.2 下游侧扫吃水检测装置
升船机下游引航道没有适应水位变化的浮式装置,只能考虑安装侧扫吃水检测装置。侧扫装置计划安装在辅助闸首处,主要由滑轨及浮体、检测设备、数据采集处理、显示软件系统组成,实时检测出通过船舶的吃水量信息,以二维坐标图显示测量结果。同时通过通信模块传输给数据存储及检索系统。
1.3 承船厢富裕水深检测装置
通过船舶吃水控制标准决定于航道水深和富裕水深,承船厢内富裕水深受航道水位波动、船舶下沉量等多重因素影响,在升船机承船厢厢头安装富裕水深检测装置,可以实时检测船舶进出厢富裕水深值,收集各种船型、各种工况下富裕水深变化情况,为确定吃水标准提高数据支撑。
1.4 船舶进出厢航速检测装置
通过升船机模型试验显示,船舶进出厢速度与富裕水深关系密切,在3米水深条件下,吃水2米船舶出厢速度从0.3米/秒增加到1米/秒,相应下沉量由24.7厘米迅速增大到67.7厘米。如果不限制船速,发生船舶触底的概率很高。在承船厢上安装合适的船速检测装置,通过现场实时显示和提醒,能够实时控制船舶进出厢速度,减少下沉量。
1.5 数据存储及检索系统
数据存储及检索子系统包括AIS系统、数据处理系统。AIS系统和数据处理系统安装在升船机塔柱顶部机房,数据处理系统主要通過网络传输获取船舶吃水检测装置采集的船舶吃水信息、船舶速度检测装置采集到的船舶航速信息以及承船厢富裕水深检测装置采集到的船舶的动吃水信息,并对以上信息进行一定数据处理,保存到船舶信息数据库中,便于工作人员了解过往船舶的具体信息并对违章船舶采取一定的措施,保证升船机的安全运行。
2 项目建设情况
2.1 上游仰扫检测装置建设
根据向家坝升船机承船厢设计水深3米,长江水系通过船舶标准船型最大吃水,并适当兼顾已建非标船型,检测架安装水深4米,吃水深度检测范围确定为0-3米。检测支架采用L型支架(4米×10米),竖直段通过拆除浮堤一组软靠把,利用原来预留螺栓孔固定,这样也可以避免船舶经过时碰撞损坏。
检测装置主要由吃水感知,声速标定,数据补偿,水压传感器动态测量,同步控制以及信息融合与处理等子系统组成。装置实时检测出通过船舶的吃水量信息,以二维坐标图和三维图形方式显示测量结果。
吃水感知子系统由不少于16个高精度高速测距传感器构成单波束传感器阵列,实现通过船舶到检测架之间的距离值的测量。船舶经过检测支架时连续测量得到三维吃水数据;声速标定子系统对声速进行实时测量,从而对保证水下超声波阵列测量的准确性;同步控制子系统主要完成测量装置的时间控制;水压传感器动态测量子系统完成对检测支架水下姿态的实时测量;数据补偿子系统是对各子系统进行数据采集和实时修正,从而提升吃水检测精度。
2.2 下游侧扫检测装置建设
考虑向家坝升船机通过船舶最大吃水小于2.5米,并考虑现场实际,下游辅助闸首宜采用侧扫吃水检测法,安装地点在辅助闸首防撞钢丝绳门槽内。通过在门槽内设置滑轨、浮式检测架随动采取数据,吃水深度检测范围确定为1.5米~3.0米。
侧扫吃水检测系统主要包含阵列调制发射、阵列调制接收、水压传感器动态测量、同步控制信息融合与处理、远程传输等子系统、系统信息处理与显示系统和水下浮式安装架1对等组成,实时检测出经过船舶的吃水量信息,以二维坐标图显示测量结果。
超声波发射子系统和接收子系统利用浮箱分别安装在升船机下游辅助闸首的两侧,使得发射与接收阵列能对应协调,同步控制模块给超声波发射传感器,具有防止信号相互干扰功能。考虑现场的波浪大的情况,系统采用水压传感器动态测量子系统对两侧传感器阵列实时深度进行测量,为消除风浪的影响,接收阵列数量大于发射阵列数量的2倍。
最终的测量数据将通过网络传输到固定数据点,得到船舶的吃水信息,并绘制船舶吃水二维坐标图和用文本显示船舶吃水数据。
2.3 承船厢富裕水深检测装置建设
向家坝升船机货物运输以下行为主,船舶出厢时,阻塞效应最大,为确保船舶不触碰升船机承船厢底板,在承船厢下厢头安装侧扫式水深检测装置,实时检测船舶出厢过程富裕水深值。富裕水深测量范围确定为0.2米~1米。
富裕水深检测系统组成与下游侧扫吃水检测系统基本相同,只是省略了滑轨和浮箱,检测架直接固定在承船厢两侧。同时检测范围较窄,发射和接收传感器数量适当减少。
2.4 船舶航速检测装置建设
船舶速度检测子系统硬件主要包括以下部分:上下游测速雷达装置、数据采集和处理模块、预警显示模块和与系统监测控制中心通信模块。雷达装在承船厢中部,分别面对上下游。LED双面显示屏分别位于左右侧厢头,船舶进出厢都能看到速度实时显示和报警信息,提醒船舶驾驶员控制船速。
测速雷达装置主要由测速一体化雷达和云台组成,一体化雷达安装在云台上,测量船舶航速、距离数据,并将其传送至预处理模块,预处理模块对数据进行初步处理并传送至上位机。
船舶航速检测装置与承船厢富裕水深检测装置具备集成显示功能,可实现同一船舶航速与吃水(富裕水深)关系图表,便于对比分析。
2.5 数据存储及检索系统建设
数据存储及检索系统设置服务器和磁盘阵列,主要用于存储和查询历史数据。该系统综合采集船舶吃水检测装置、船厢富裕水深检测装置、船舶速度检测装置、船舶AIS信息采集子系统、数据补偿子系统数据,提供综合查询和历史回放等功能。其中,数据补偿子系统主要针对一些水压、声速、船的倾角感应、船舶航速这些量对测得的基本吃水信息进行一定的误差修正,从而确保数据的准确性。将得到的准确信息利用通讯网络传送给后台进行软件的处理,包括界面的显示,数据的反馈、数据异常提醒等。
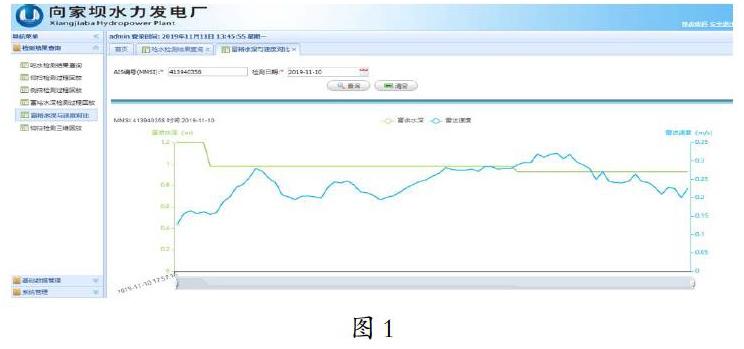
后期为了方便查询吃水航速数据,数据存储检索系统通过无线4G网络把数据传输到云端,通过公网就可以实时查询通过船舶吃水相关信息,为通航安全管理提供了更便利的手段。
3 结论
向家坝升船机2018年5月投入试通航,为保证通航安全,向家坝电厂在前期科研取得成功经驗的基础上,2019年完成了通过船舶吃水、航速检测系统建设。经过计量部门认证,吃水精度≤0.1米,测速精度满足≤0.05米/秒,满足使用要求。该系统的成功实施,为升船机安全运行提供了强有力的保障,并为下一步适当放宽吃水标准,提高通过能力提供了数据支撑。
参考文献:
[1]李中华、胡亚安、刘克平.向家坝升船机承船厢设计水深标准[J].水运工程,2016(12):153-157.