面向条带SAR的多孔径图像偏移自聚焦算法
2020-11-05 09:30李谨成郭德明
雷达科学与技术 2020年5期
李谨成,郭德明
(南京电子技术研究所,江苏南京 210039)
0 引言
在SAR信号处理中,方位向匹配滤波器的构造精度有赖于对目标斜距历程的精确计算。对于机载平台,由于受到大气湍流、阵风、导航设备不准等多种因素的影响,飞机常常会偏离事先规划的理想航迹。其结果导致雷达相位中心到目标之间的接收斜距相对于理想状态发生变化,从而引入回波多普勒信号的相位和幅度误差,严重影响成像质量。因此,机载SAR的数据处理中需要进行运动补偿。现阶段,由于惯性导航设备的精度达不到亚波长级[1],基于自聚焦处理的运动误差估计是获取高精度机载SAR图像的关键步骤。
多孔径偏移(Multi Aperture Mapdrift,MAM)算法是一种针对聚束SAR的参数化自聚焦算法[1]:相比于以最小熵算法[2]为代表的参数化自聚焦算法,MAM的误差模型的阶数更高,故其误差估计精度更高;相比于以相位梯度自聚焦(PGA)[3]为代表的非参数化算法,MAM算法估计的鲁棒性更高,能够在场景缺乏强散射点的情况下准确地估计运动误差。MAM算法通过测量子孔径图像间的位置偏移来估计误差,由于条带SAR的雷达波束随着飞机的运动而运动,其子孔径图像对应的场景在不断变化,因此传统MAM算法不能直接用于条带SAR的自聚焦处理。
本文提出了一种能够用于条带SAR的多孔径偏移(Stripmap Multi Aperture Mapdrift,SMAM)算法,在传统MAM算法的框架下给出针对条带模式的子孔径划分方法、子孔径成像方法与误差拼接方法,该方法能够高精度且鲁棒地估计机载条带SAR的运动误差,从而获取高精度的机载SAR图像。
1 信号模型
机载SAR的观测几何模型如图1所示,Y轴指向载机飞行的方向,Z轴为高度向,X轴与Y轴、Z轴一起构成右手直角坐标系。图1中的蓝色虚线表示事先规划好的理想航迹,红色弯曲虚线表示存在运动误差时载机飞行的实际航迹。当不存在运动误差时,载机到目标的距离为
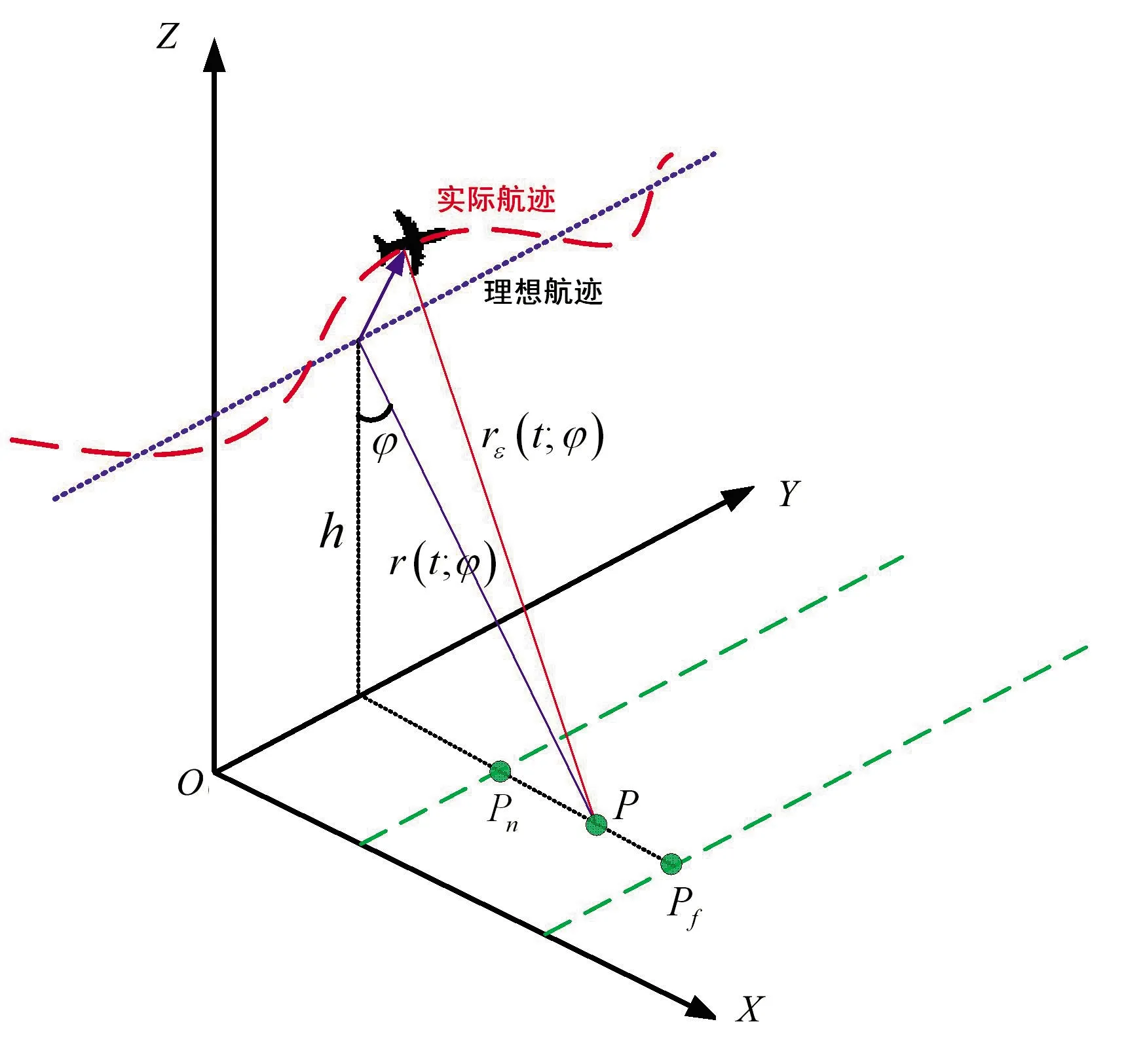
图1 机载SAR的观测几何模型
(1)
式中,h为载机的飞行高度,φ为接收机下视角,V为载机的飞行速度,t为方位向时间,t0为载机到目标距离最近的方位向时刻。
当存在运动误差时,载机到目标的距离为

r(t;φ)+ΔrLOS(t;φ)
(2)
式中,Δx(t)和Δz(t)分别为载机在X方向和Z方向上偏离理想航迹的位置误差,ΔrLOS(t;φ)为接收斜距的误差,并且
ΔrLOS(t;φ)=Δz(t)·cosφ-Δx(t)·sinφ
(3)
SMAM将运动误差建模为高阶多项式形式,即
(4)
式中,ηm为第m阶误差系数。
2 SMAM算法
2.1 数据分割
为了提高数据处理效率,在SAR的成像处理中每次需要处理多个合成孔径长度的数据。SMAM算法的第一步是沿方位向分割数据,如图2所示,SMAM算法中数据分割分为两步。如图2(a)所示,SMAM算法首先将数据沿方位向分割为多个估计子块。如图2(b)所示,每个SMAM估计子块之后又被分为多个方位向子孔径,每个方位向子孔径对应的时间长度在一秒左右[4]。图2(b)给出的是子孔径数目为4时的情况,由于每个SMAM估计子块的长度小于一个合成孔径时间,因此每个子孔径数据对应的场景范围均有重叠的部分。图2(b)以第一个子孔径为例给出了其与其他子孔径之间的重叠场景(SOL(p,q)表示第p个和第q个子孔径间重叠场景的长度),可见重叠场景的方位向长度随着子孔径之间距离的增大而减小,而相邻子孔径之间的重叠场景范围最大。

(a)整段数据被分割为多个估计子块
2.2 子孔径成像
本文采用后向投影(Back Projection,BP)算法[5]进行子孔径成像处理,为了使子图像与信号相位历程之间有固有的傅里叶变换对的关系,子孔径成像网格被建立在虚拟极坐标系中[6]。机载虚拟极坐标系的坐标轴为(r,Ξ),其中Ξ=sinθu,考虑到机载SAR的瞬时多普勒频率fd=2Vsinθu/λ,λ为雷达波长,因此在机载虚拟极坐标系构建图像在多普勒频域是均匀采样的。另一个坐标轴为距离轴,则可认为子孔径图像被构建在距离多普勒域。
2.3 子孔径图像互相关处理
在获取重建在机载虚拟极坐标系的各个子孔径图像之后,便可通过互相关处理测量各子图像之间场景的偏移,进而计算高阶多项式误差模型中的各阶系数。图3给出了条带模式中子孔径图像互相关处理的示意图,其中位于上方的图像为基准图像,位于下方的是被移动图像。在互相关处理中,被移动图像沿方位向作圆周位移,然后通过两幅图像的幅度相乘得到对应位移下的互相关函数值,即
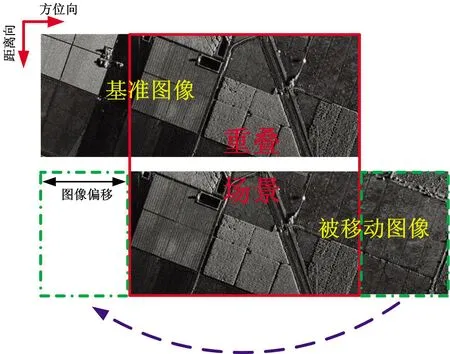
图3 条带模式中子孔径图像互相关处理示意图
Cp,q(i)=∬Ip(fa,τ;0)·Iq(fa,τ;i)dfadτ
(5)
式中,Iq(fa,τ;i)表示第q个子孔径图像沿方位向圆周位移i个像素时的二维幅值函数。
图4给出了本文第3节所处理真实SAR数据的互相关函数,互相关函数的整体下降趋势是由于子图像天线方向图随着圆周位移相关性下降造成的。当子图像间的两个子图像的重叠场景处于相同的方位向位置,其互相关函数中会均为出现一个尖峰,图4中互相关函数的梯度函数如图5所示,图5中各梯度函数的最大值和最小值分别对应互相关函数中尖峰两侧的“陡坡”。位于“陡坡”顶端的尖峰是函数的极值,其对应的梯度值为零,所以可以通过测量互相关函数梯度的最大值和最小值之间的零点来自动获取子图像间场景的偏移量。以第一幅与第五幅子图像互相关函数为例,图4和图5分别在右上角给出了其互相关函数的尖峰附近以及互相关函数梯度最值之间的零点附近的放大图,由图中标出的坐标可见相关函数的尖峰与互相关函数梯度最值之间的零点对应着相同的横坐标。
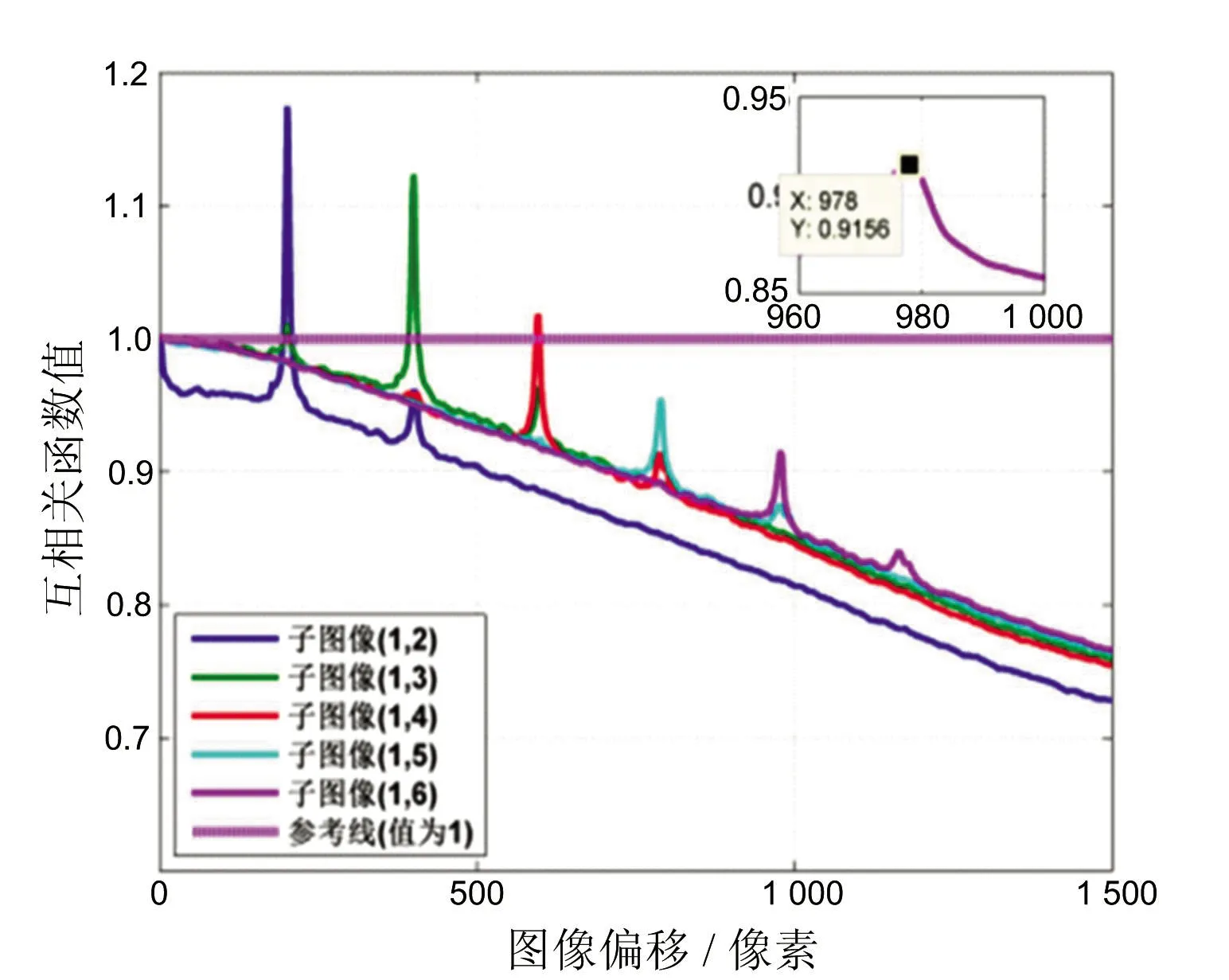
图4 真实SAR数据的互相关函数
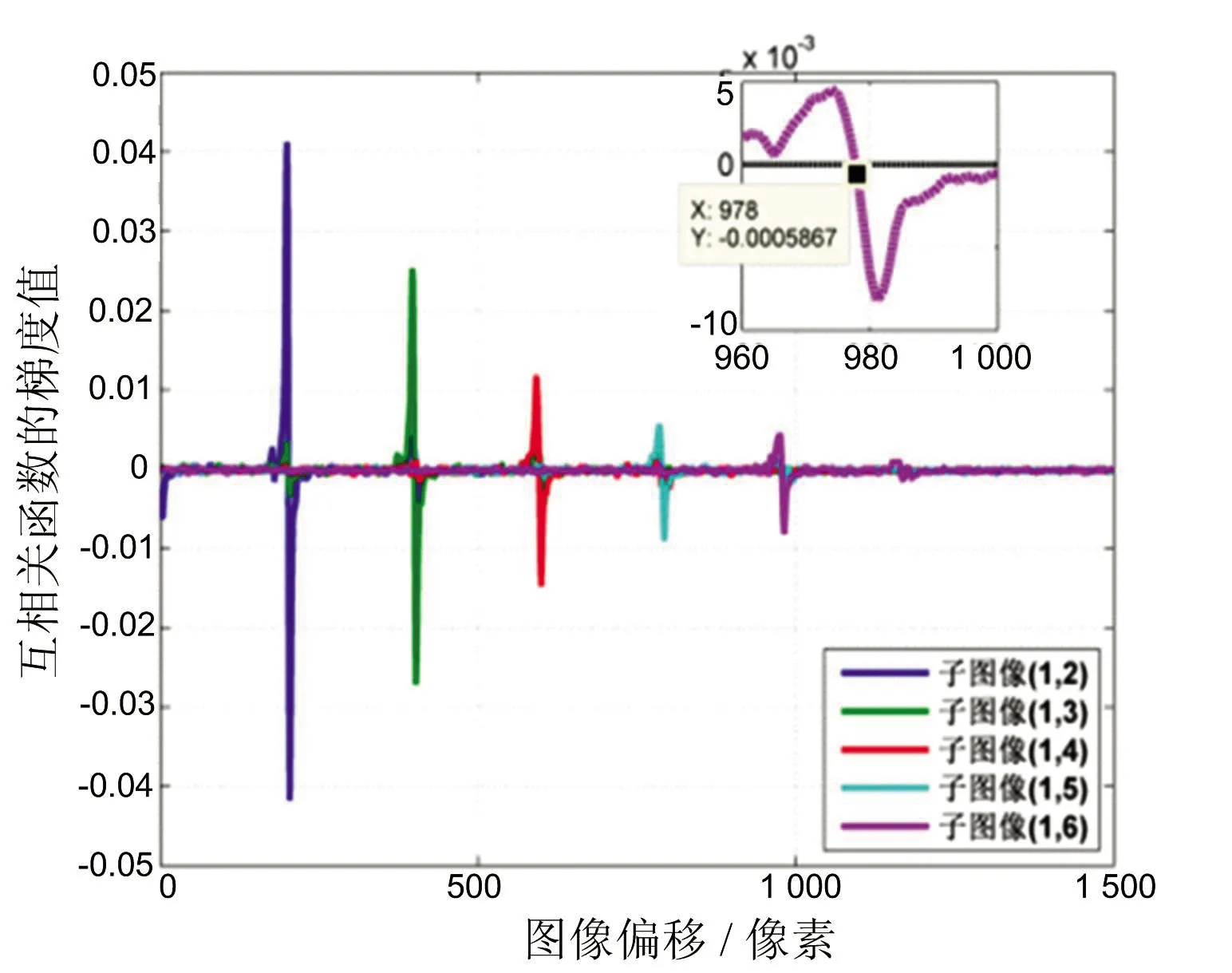
图5 互相关函数的梯度
2.4 误差估计与拼接
引起各子孔径间重叠场景偏移的有两方面因素。第一个因素为条带模式下天线波束的移动:当误差模型的阶数设定为M时,在SMAM处理每个估计子块内的子孔径数目也为M,则同一目标在第p幅和第q幅(q>p)子图像间的频率偏移为
(6)
式中,fr=2V2/λRB为机载SAR方位向调频率,Tes为估计子块对应的时间长度。则该频率偏移在距离多普勒域引起的子图像偏移为
(7)
式中,round[·]表示就近取整操作,Ns为各子图像方位向采样点数。
第二个引起场景偏移的因素为载机偏离理想航迹引起的运动误差:如式(4)所示,在SMAM中运动误差被建立为高阶多项式的形式,则在第p个子孔径内其对应的相位误差为
4.控制零食的摄入量及时间,且尽量选择健康的零食。很多零食盲目的追求口感,而忽略了营养价值,所以要慎重选择零食种类。零食的摄入不应该影响到正餐,要把握好摄入量及时间。
(8)
(9)
由傅里叶变换的性质可知,时域的线性相位对应着频谱的搬移。如前所述,各子孔径的图像构建在多普勒域(方位频域),则式(9)的时域线性相位在第p幅子图像内引起的偏移量为
(10)
则由运动误差引起的第p幅和第q幅图像之间的相对偏移量为

(11)
其中p,q∈[1,2,…,N],即式(11)能够包括所有子图像间的相对偏移量。该表达式能够写成下面的矩阵形式[1]:
Δ=δη
(12)

(13)
(14)
(15)

(16)
(17)
其中互相关测量得到的偏移矩阵Δ为
(18)
波束移动引起的偏移矩阵Ω为
Ω=[Ω1,2…Ω1,MΩ2,3…Ω2,MΩ3,4…ΩM-1,M]T
(19)
通过解式(12)中的超定线性方程,可得高阶误差多项式的系数的最小二乘解为
ηLs=(δTδ)-1δTΔ
(20)

(21)
由于在误差多项式中不包括线性相位和常数相位,在进行各估计子块间的误差拼接处理时需要通过二阶求导将式(21)转换为位置误差加速度的形式[8],即
(22)
3 实测数据处理结果
为了验证所提运动误差估计方法的有效性,本文选择一段实测高分辨机载条带SAR数据进行实验。该机载SAR系统工作于X波段,工作模式为条带模式,方位向分辨率为0.2 m,脉冲重复频率为2 000 Hz,飞机的飞行高度为5 000 m,飞行速度约为100 m/s。该系统所具备的惯导设备精度较低,其绝对精度在米级,远大于雷达波长(厘米级),且惯导数据的更新频率为20 Hz,远低于系统的脉冲重复频率。
在高分辨率的机载SAR的自聚焦处理中,误差估计通常是在子孔径内进行的,然后进行拼接并在全孔径补偿。因此,子孔径误差的估计精度对于获取聚焦的雷达图像至关重要。图6给出了自聚焦处理前后的子孔径图像:其中图6(a)是未经处理的图像,由于惯导精度较低,图像散焦严重;图6(b)是PGA算法的处理结果,由于子图像内缺乏强散射目标,PGA算法不能有效地估计运动误差;图6(c)给出的是本文所提的SMAM算法的处理结果,图中的高压塔架清晰可见,说明SMAM算法能够鲁棒且高精度地估计运动误差。
(a)未处理 (b)PGA处理 (c)SMAM处理
图7给出的是全孔径数据的处理结果,其中图7(a)给出的是用惯导数据计算并补偿运动误差后的处理结果,由于惯导设备的精度较低,图像的整体尤其图像的左半部分严重散焦。图7(b)给出的是经过SMAM处理后的结果,可见图像的质量明显提高,图像熵由18.626 9降低为17.965 9(图像熵越小越好),场景中的屋顶,高压电线塔架等目标能够被清楚地分辨出来。

(a)自聚焦处理前
4 结束语
本文所提出的SMAM算法是一种参数化的自聚焦方法,其将运动误差建立为高阶多项式的形式,通过测量各子孔径图像内的重叠场景的偏移量来计算高阶多项式的系数。由于误差模型的阶数较高,能够取得比传统参数化方法更好的估计精度,并且算法对起始输入的要求较低,能够鲁棒地估计运动误差。需要注意的是,当运动误差比较复杂时,高阶多项式误差模型的精度仍然有限,可以再通过如PGA的非参数化处理进一步提高误差估计的精度。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
煤炭工程(2022年7期)2022-07-21
计算机应用与软件(2022年6期)2022-07-12
自然灾害学报(2022年2期)2022-05-10
军事文摘(2021年24期)2022-01-11
幼儿园(2021年12期)2021-11-06
中国学校体育(2021年10期)2021-04-26
舰船电子对抗(2019年5期)2019-12-04
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15