
基于红外探测的人员搜索及定位技术研究*
2020-11-02 11:43刘耀波
矿山测量 2020年5期
刘耀波
(中煤科工集团西安研究院有限公司,陕西 西安 710077)
随着国民经济的飞速发展,我国煤炭行业发展迅猛,但在煤炭开采过程中却时有发生瓦斯爆炸、矿井失火、顶板塌方及透水等重特大事故,对矿工的生命安全造成了严重的威胁[1]。矿难发生后,及时、迅速地发现被困矿工是开展高效救援的前提;然而煤矿事故现场环境十分复杂,尤其在发生瓦斯、煤尘等爆炸事故以后,容易引发二次爆炸等事故,环境存在高危险性,此时搜救人员很难在第一时间内进入到矿难现场对遇险人员实施救援。通常情况下,由救援钻机打通救援孔并下放测量探头至井下的矿难现场,探测到遇险人员位置后采用大直径钻孔实施营救措施。因此对遇险人员进行精确搜索及定位会极大影响钻孔救援的效率[2-4]。
目前,用于钻孔救援的测量探头主要采用钻孔窥视仪,即采用光源照亮矿井后使用摄像头肉眼探测遇险人员的位置[5];然而复杂的矿井环境以及救援孔直径的限制,使得该探测方式的工作距离有限,很难精确观测所有遇险人员的位置。为了克服上述问题,本文研究了一种基于生命探测和空间探测的人员搜索及定位技术,不仅可以精确、直观显示遇险人员的空间位置,而且可以对矿井下的环境实现空间探测,对后续实施高效营救具有重要的参考价值。
1 工作原理
由于矿井下的环境十分复杂,为了能够精确获取遇险人员在矿井下的位置,需要实现矿井环境的三维空间探测和遇险人员的生命探测及定位,图1为人员搜索及定位技术的工作原理示意图。

图1 人员搜索及定位技术的工作原理示意图
为了实现矿井环境的三维空间探测功能,首先,采用深度测量模块实现测量探头的纵向深度测量;其次,当测量探头位于不同的纵向深度时,采用搭载激光测距模块、红外摄像模块以及电子罗盘模块的特定旋转平台以固定角度间隔实现水平面内360°旋转,并在不同角度测量探头与岩壁之间的距离;最后,当测量探头在不同深度,依照特定精度随着转台依次采集不同角度方向的距离后,对所有采集点进行空间拟合后便能实现矿井的三维空间探测。另一方面,由于绝对零度之上的物体会发出热辐射,因此当旋转平台在水平面内旋转时,旋转平台上搭载的红外摄像模块可以有效探测矿井环境内的遇险人员,并结合电子罗盘、激光测距以及深度测量模块的测量数据绘制出遇险人员在矿井中的具体位置。
2 硬件组成
根据人员搜索及定位技术的原理可知探测装备的硬件模块包括:深度测量模块、激光测距模块、红外摄像模块、电子罗盘模块以及测量主机,其连接关系如图2所示。
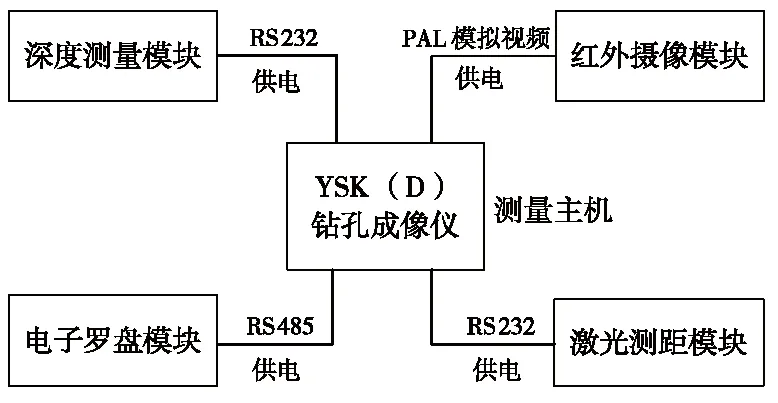
图2 探测装备的硬件原理框图
为了验证该技术是否可行,本文开发了深度测量模块,选型了激光测距模块、红外摄像模块和电子罗盘模块,并采用中煤科工集团西安研究院有限公司的YSK(D)钻孔成像仪作为测量主机,接收各个模块的数据传输。以下将对不同模块的参数选型及相关电路开发进行详细介绍。
2.1 深度测量模块
通常,光电编码器是用于深度测量需求的常用元件,根据工作原理的不同,该种元件分为增量型和绝对型,两者之间的差别在于前者能够产生与位移增量等值的脉冲信号,而后者可以直接读出转动轴的绝对位置信息[6-8]。考虑到不需要获取转动轴的绝对位置,且增量型具备传输距离较长、抗干扰能力较强和成本低等优点,本文选取长春三峰光电仪器制造有限公司的PIB6C-1024-5V增量型光电编码器实现测量探头的深度测量,其工作原理与实物照片如图3所示。该编码器包含A、B、C三个输出端,其中,A、B端输出两相互差90°的脉冲信号(即所谓的两组正交输出信号),用于判断正转还是反转,Z端每当码盘旋转一周时只发出一个标志信号,用于指示机械位置或对积累量清零。本文选取的光电编码器为1 024线,即转动轴转动一圈时A、B端可输出1 024个脉冲,Z端只输出一个脉冲。

图3 增量型光电编码器的工作原理与实物照片
为了实现深度测量,需要设计专用电路对光电编码器的脉冲信号进行去噪处理、采集和传输。 经过调研后,核心处理器选用意法半导体的基于ARM的32位微控制器——STM32F103C8T6芯片,采集电路原理图如图4所示。该处理器的内核为ARM Cortex-M3,最高工作频率为72 MHz,内置512 K字节的Flash存储器和64 K字节的SRAM存储器,包含4个通用16位定时器,2个PWM定时器,2个基本定时器,2个I2C接口(支持SMBus/PMBus),5个USART接口,3个SPI接口,1个CAN接口(2.0B 主动) 。并且为了方便使用,所有接口都可以通过寄存器配置映射到相应的外部引脚。为了满足不同的工作模式需求,该处理器支持3种低功耗模式:休眠、停止、待机。
为了保证光电编码器的脉冲信号不受外界干扰,本文在编码器A、B、C脉冲输出处分别加一个1K的上拉电阻,并在脉冲采集输入与大地间连接一个1nF的滤波电容。当滤波后的脉冲经过反相器74HC14进行两次反向后,可以使得脉冲信号的沿更加陡峭和平稳。经过74HC14的脉冲信号A、B、C输入至STM32F103C8T6芯片的PB5、PB6、PB7引脚。脉冲信号输入至STM32F103C8T6芯片后,经过计算可以得到深度信息,并通过SP3232E芯片传输至测量主机。

图4 光电编码器的采集电路原理图
2.2 激光测距模块
由于激光具有单色性好、方向性强、亮度高等优点,因此激光测距是一种常用的光波距离测量手段。根据工作原理的不同,激光测距可分为脉冲式和相位式,前者是通过测定脉冲激光在测线上往返所经过的时间进而计算距离,而后者是根据发射信号与回波信号之间的相位差所包含的信息来间接完成测距的测量;相比较而言,前者的测量距离更长,后者的测量精度更高。综合考虑后,本文采用成都景瑞特科技有限公司的LRB605B型相位式激光测距模块,实物照片如图5所示。
该模块供电电压为DC2.0~3.3 V,模块体积为72 mm×40 mm×18 mm,有效测量范围为0.03~120 m,测量误差最大不超过±3.0 mm,单次测量时间为0.125~4 s,测量数据可通过RS232接口按照既定协议上传至上位机。

图5 LRB605B型相位式激光测距模块照片
2.3 红外摄像模块
理论上,所有温度在热力学绝对零度以上的物体自身都会发射电磁辐射,一般自然界物体的温度所对应的辐射峰值都在红外波段。为了能够有效探测遇险人员,本文利用红外探测器和光学成像物镜捕捉其自身发出的红外辐射能量,并反映到红外探测器的光敏元件上,最终通过视频格式传送至上位机。本文采用的红外摄像模块为浙江大立科技股份有限公司的D880型红外摄像模块,实物照片如图6所示。

图6 D880型红外摄像模块照片
该元件的探测波长范围为8~14 um,摄像分辨率为384×288像素,视频输出格式可选模拟PAL制式或者数字视频格式。此外,由于该元件具备图像降噪功能, 可以在复杂的外部环境中抑制各种干扰,继而保证图像质量不会下降。
2.4 电子罗盘模块
为了测量旋转探头的方位,进而为后续的空间建模及人员定位提供必要的参数信息,本文采用中煤科工集团西安研究院有限公司研制的PNI高精度全姿态三维罗盘通过RS485接口按照既定协议提供测量探头的方位信息,实物照片如图7所示。该模块采用了PNI三轴磁感传感器和MEMS加速度传感器的组合测量方案,通过STM32微处理器实时解算方位角、倾角和横滚角,可以保证全空间范围内方位角的测量误差小于±1.5°,倾角和横滚角的测量误差小于±0.3°。此外,该模块的外形尺寸为72 mm×16 mm×8 mm(长×宽×高),工作电流小于40 mA,具有体积小和功耗低的优点。尽管该模块能够通过算法补偿外界环境中的固定磁场,但为了保证产品达到最佳测量效果,应尽可能使其安装位置远离铁、镍、磁铁、发动机和其他磁性物质,因此探头材料应进行无磁化处理[9-10]。
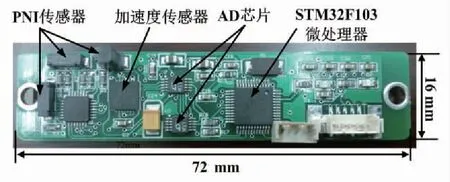
图7 PNI高精度全姿态三维罗盘照片
3 软件设计
根据探测装备的硬件组成可知:激光测距模块和电子罗盘模块可以通过RS232接口按照既定协议将其测量数据传送至YSK(D)钻孔成像仪测量主机,红外摄像模块可通过同轴电缆将视频信号传送至YSK(D)钻孔成像仪测量主机,唯独深度测量模块需要通过微处理器STM32103C8T6采集光电编码器数据并计算深度后通过RS232接口将测量数据传送至YSK(D)钻孔成像仪测量主机。通常STM32103C8T6通过定时器采集光电编码器数据,根据计数方式的不同分为三种模式:仅在TL1计数(A相)、仅在TL2计数(B相)以及在TL1和TL2都计数(A相和B相都计数)。前两种模式精度相同,编程简单,第三种模式精度提高了4倍,编程较为复杂,由于本文要求的测量精度较高,因此采用了第三种模式。以下为本文采用定时器4采集光电编码器数据时的相关寄存器参数配置,并可通过公式(1)计算深度信息。
TIM4->PSC = 0x0;//预分频器
TIM4->ARR = 15-1;//设定计数器自动重装值
TIM4->CR1 &=~(3<<8);//选择时钟分频:不分频
TIM4->CR1 &=~(3<<5);//选择计数模式:边沿对齐模式
TIM4->CCMR1 |= 1<<0;//CC1S='01',IC1FP1映射到TI1
TIM4->CCMR1 |= 1<<8;//CC2S='01',IC2FP2映射到TI2
TIM4->CCER &= ~(1<<1);//CC1P='0' IC1FP1不反相,IC1FP1=TI1
TIM4->CCER &= ~(1<<5);//CC2P='0' IC2FP2不反相,IC2FP2=TI2
TIM4->CCMR1 |= 3<<4;// IC1F='1000',输入捕获1滤波器
TIM4->SMCR |= 3<<0;//SMS='011',所有的输入均在上升沿和下降沿有效
TIM4->CNT = 0;
TIM4->CR1 |= 0x01;//CEN=1,使能定时器
(1)
式中,H为深度;n为计数器值;L为光电编码器线数;C为与光电编码器固定的滑轮周长。
4 实验与仿真
由于LRB605B型相位式激光测距模块和PNI高精度全姿态三维罗盘都是成熟的工业化产品,因此本文着重测试了深度测量模块的测量精度和红外摄像模块探测效果。
首先,量取50 m电缆并从0 m开始间隔10 m做出标记,将计数器与YSK(D)钻孔成像仪测量主机连接,打开串口调试助手,对深度信息清零后,将电缆通过深度计数器滑轮拉出,当电缆标记通过10 m、20 m、30 m、40 m、50 m电缆时分别读取并记录主机上的深度测量值,其测量误差可按照如下公式计算:
(2)
式中,LS为测量误差;LO为标准电缆长度;Li为实测电缆长度;LR为测量范围。
分别计算出5个测试点的测量误差,其最大值即为计数器的测量误差。经过测量后,深度测量数据如表1所示。测试结果表明:深度测量虽然满足实际测量要求,但确实存在误差,这是由于线缆材料具有弹性引起的。在实际应用中为了提高深度的测量精度,应当根据测量误差对深度测量结果进行误差补偿。
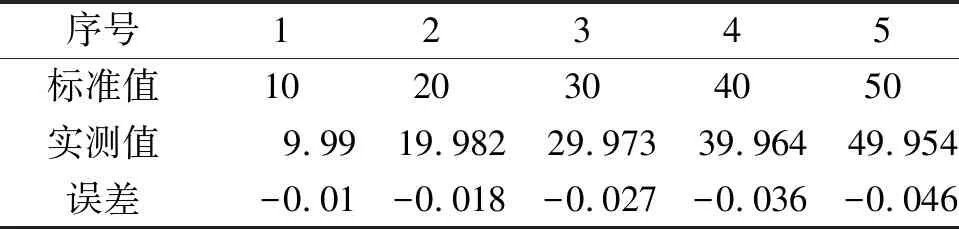
表1 深度测量数据/m
其次,为了验证红外摄像模块针对人体辐射的探测效果,本文采用D880型红外摄像模块进行了测试,测量效果如图8所示。显然,本文选用的D880型红外摄像模块不仅可以清楚探测到人体目标,而且可以清楚观测到人体目标手中的打火机,验证了本文采用红外摄像模块完成煤矿井下对遇险人员进行搜索识别的设计思路。

图8 红外摄像模块采集图像
最后,为了进一步验证空间测量及人体定位技术的正确性,本文选用了长为6 m、宽为3.6 m的密闭房间作为测试环境,被测目标位于房间内;为了实现对被测目标进行搜索及定位,在房间的正中位置安置简易测量探头,即将深度测量模块、激光测距模块、红外摄像模块和电子罗盘模块固定于机械式转台上,并从特定高度缓慢垂下探头逐层扫描周围空间。为了提高测量效率,本文在测量探头的纵向深度方向每隔0.1 m对周围空间进行测量,由于被测人体高度为1.70 m,因此设置最高测量高度为2 m,图9为使用Matlab对采集数据整理后绘制的空间三维图。显然,该方法很好地实现了测量环境的空间探测,并且能直观显示出被测人员在测量环境中的位置,即人员与测量探头的直线距离约为2.63 m,位于偏北197.745°。
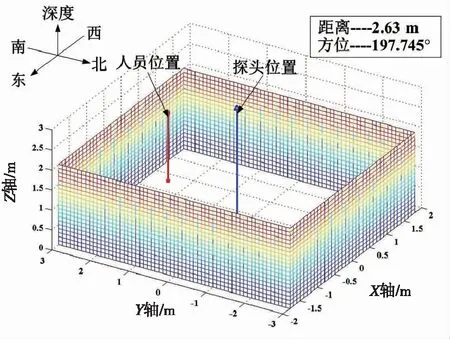
图9 MATLAB模拟的空间三维图及人员定位
5 结 论
本文研究了一种基于红外探测的人员搜索及定位技术,分析了该种探测技术的工作原理,并对相应探测装备的硬件组成进行了设计,主要包括激光测距模块、红外探测模块和电子罗盘模块的参数选型以及深度测量模块的硬件设计。此外,为了提高深度测量的精确性,采用了4倍频定时器计数模式,并对相关寄存器参数进行了配置。最后,着重测试了深度测量模块的测量精度和红外摄像模块探测效果,并针对密闭房间中的目标人员进行了搜索与定位。试验结果表明:本文设计的深度测量模块和选用的红外摄像模块均能满足实际测量要求,设计的简易探测设备能够准确搜索及定位被测人员,被测人员与测量探头的直线距离约为2.63 m,位于偏北197.745°。综上所述,本文研究的人员搜索及定位技术可以精确、直观搜索及定位遇险人员的空间位置,能够显著提高井下救援的工作效率。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
科学技术创新(2021年5期)2021-03-17
电子技术与软件工程(2021年23期)2021-03-08
——编码器
演艺科技(2020年7期)2020-08-13
电子制作(2018年19期)2018-11-14
制导与引信(2017年3期)2017-11-02
作文·初中版(2017年2期)2017-03-06
电脑知识与技术(2016年7期)2016-05-19
探测与控制学报(2015年4期)2015-12-15
中国高新技术企业(2015年25期)2015-07-24
