
车载移动测量系统发展历程及应用*
2020-11-02 11:43聂顺根姚连璧张邵华阮东旭
矿山测量 2020年5期
聂顺根, 姚连璧, 张邵华, 阮东旭
(同济大学 测绘与地理信息学院, 上海 200092)
移动测量系统是当今测绘界的前沿科技之一, 代表着未来道路电子地图测制领域的发展主流方向,能做到在车辆的高速行进之中快速采集道路及道路两旁地物的空间位置数据和属性数据[1]。近几年来,车载移动测量系统技术发展迅速,在三维街景数据采集与三维建模、道路及管线设施普查、公众安全等领域得到了不同程度的应用,显现出非常广阔的应用前景[2]。由此,实际生产需要对于车载移动测量技术的要求也越来越高,这也激励着MMS(Mobile Mapping System)技术的不断进步。
基于车载移动测量系统的实际生产应用需求,同济大学测绘与地理信息学院的移动激光扫描团队集成激光、视觉和惯导,搭建了本文的车载移动激光扫描系统,并研发了配套数据采集与处理软件,可用于公路、轨道、磁浮等场景的三维成图、道路检测、形变监测、应急测绘保障等领域,克服了传统成图或监测手段的耗费人力、低效率等缺点。本文简述了团队车载移动测量系统更新换代的历程,并介绍了其结构与主要功能,及其在实际生产工作中的应用。
1 系统发展历程
随着仪器设备的不断更新以及对点云精度要求的提高,团队根据仪器特性和精度要求对多传感器平台的集成方案和算法设计进行更新换代,以满足实际应用需求。
1.1 初代车载移动测量系统
第一代系统主要由采集路面点云数据的SICK LMS511-20110Pro型号扫描仪、采集影像数据的Ladybug全景相机,以及获取轨迹数据和姿态的RTK与倾斜仪这三部分组成。通过对传感器的系统集成与设计,采集后进行处理得到的点云能够较为真实地反映道路的具体情况。系统平台如图1所示。

图1 第一代移动测量系统
1.2 第二代车载移动测量系统
在第一代系统的基础上,第二代系统增加了两台SICK LMS511-10110Pro型号激光扫描仪,放置于车顶平台的前方两侧,增加了扫描的覆盖面;并用NV-LINS800型号IMU替换原来使用的倾斜仪,更准确地记录车体在移动过程中的每个瞬间的倾角变化;还增加了里程计,在卫星信号差的路段,可以利用里程计和IMU组合进行系统位置推算[3],弥补在无卫星信号下GNSS接收机无法定位的不足。算法上,针对第二代系统的整体结构,提出了一种基于标准靶球和扫描仪特征点的车载移动测量系统的外参数标定方法[4]。第二代系统结构如图2所示。经过对第一代移动测量系统的升级,提升了移动测量系统的数据采集范围和数据质量,使获取点云的平均点位精度达到12 cm左右,可以轻易地从提取的点云中判别出道路的标识标线信息[5-6]。

图2 第二代移动测量系统
1.3 第三代车载移动测量系统
第三代系统将原有三台激光扫描仪精简为两台SICK LMS511-10110Pro型号190°扫描角度激光扫描仪,实现360°范围扫描。而原系统笨重的IMU则被升级为性能相差不大,体积更小且易于一体化集成的XD300A-DGI光纤组合导航系统,且因为该新版IMU内部已集成高精度GNSS接收板卡,本系统舍弃了上一代系统单独安装GNSS接收机的设计,直接利用IMU内置GNSS定位数据获取位置信息,使得系统更加精简。另外,还添加了高精度GPS同步时钟,为激光扫描仪打上时间标签,方便传感器间时间同步。系统定位与定姿方案上也进行了改进,将原有的网络RTK定位技术替换为适用范围更广的动态后处理定位技术(PPK),定位定姿算法由原来的松耦合算法改进为稳定性和精度更高的紧耦合算法[7]。通过对第二代系统的改进,使得系统整体上更简洁,经过算法优化使得点云的精度达到10 cm左右。第三代系统的结构如图3所示[8-9]。

图3 第三代移动测量系统
1.4 第四代车载移动测量系统
在第三代的基础上,原先的两台sick扫描仪更新为Z+F 9012二维激光扫描仪。该扫描仪扫描视野为360°全覆盖,最高扫描频率为200 Hz,每秒可采集101.6万个点,可快速、高密度地获取物体的大量点云数据,同时还具有多个同步接口,能同时支持网络连接、GPS与PPS秒脉冲对接以及外置里程计连接等同步方式,可适用于多种场景。由于IMU内置的GNSS板卡可通过GPS与PPS秒脉冲接口直接为扫描仪进行授时,故移除之前为sick扫描仪授时的GPS同步时钟,简化系统结构。
第四代系统以GPS时为时间基准,通过IMU内置GNSS板卡分别为扫描仪与全景相机进行授时。借助于IMU、扫描仪、全景相机与电脑端的数据RS232传输线和网线,方便数据的快速采集,实现多传感器间的数据通讯。
相对于第三代系统,第四代系统有着更精简的框架,以及更高效的路面点云数据采集,点云精度控制在 10 cm以内。第四代系统的主体结构如图4所示。
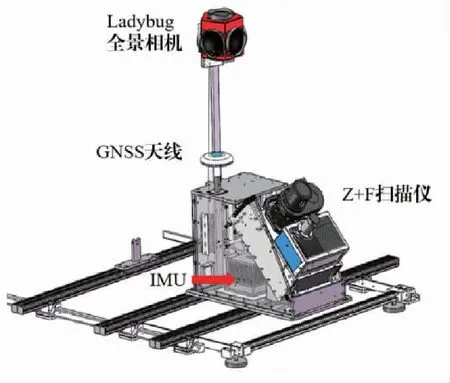
图4 第四代移动测量系统
通过每一阶段对系统的更新换代,精简了平台结构,完善了算法设计,提高了点云整体精度,对于实际应用有了更大的价值。
2 系统框架与系统功能介绍
移动测量系统的硬件部分主要有全景相机、组合导航系统INS和Z+F扫描仪,分别由全景相机采集行程中的全景影像数据,INS采集行程中的GPS数据和IMU原始数据,以及Z+F扫描仪负责采集行程中的道路面原始点云数据。经过对硬件的不断更新升级,提升了点云数据的采集频率与数据精度,使得最终点云能更真实地反映道路实际情况。
系统的数据处理算法方面,为了对多源数据进行时空基准的统一,对不同传感器的数据流进行了时间授时与同步操作,并对激光扫描仪进行标定校准,获得扫描仪与惯导系统的相对关系,最后融合惯导系统提供的车体轨迹位置和姿态参数,经过坐标转换处理,完成多源数据的融合处理,获得道路的三维点云数据。为了适应传感器的更新以及提升最终三维点云精度,对时间同步方案、传感器标定、定位定姿算法等进行不断优化,使得点云精度由12 cm左右提升到10 cm以内,获得了很大的改进。
由于点云的采集存在一定的误差,有时会导致部分地物难以分辨,通过全景相机采集实地影像数据所建立的街景系统作为参照,便可准确地反映道路的真实环境。
经过系统的集成设计与程序开发,采集的数据经处理后可得到目标坐标系下三维点云,生动立体地展现道路的真实环境。
3 成果展示
基于地理位置考虑,本文的原始点云最终转换为上海城建坐标系下三维点云。实验选择了条件相对开阔、信号接收良好的路段进行数据的采集。图5为同济大学嘉定校区仰望星空楼附近路段的点云,转向箭头、斑马线等标识都能清晰地显现出来。

图5 三维点云效果图
对于点云质量,本文从相对精度与绝对精度两方面对生成三维点云的质量进行分析与评估,从点云的几何特征与绝对坐标上对其进行评价。
3.1 相对精度分析
本文选择校园内某路段为样本,对点云进行相对精度评价。从点云的各部分细节来看,在肉眼可见范围内点云拼接无重影,标志标线清晰,三维立体模型逼真,能真实地反映出地物地貌特征,如图6所示。

图6 四平路校区点云效果
从点云上量取虚线长度、道路线间宽度以及台阶高度,与实地量取的距离进行对比,可以看出点云的相对精度较高,与实地情况相差较小,从表1的结果可以看出,误差不超过2 cm,占总长比例不超过5%。
3.2 绝对精度分析
为验证系统点云的绝对精度,本文通过全站仪或者RTK测量测区内路面上特征点的绝对坐标与点云数据中的坐标进行比较。特征点的整体坐标误差如表2所示。由表中结果可知,各指标基本保持在10 cm以内,系统点云具有较高精度。
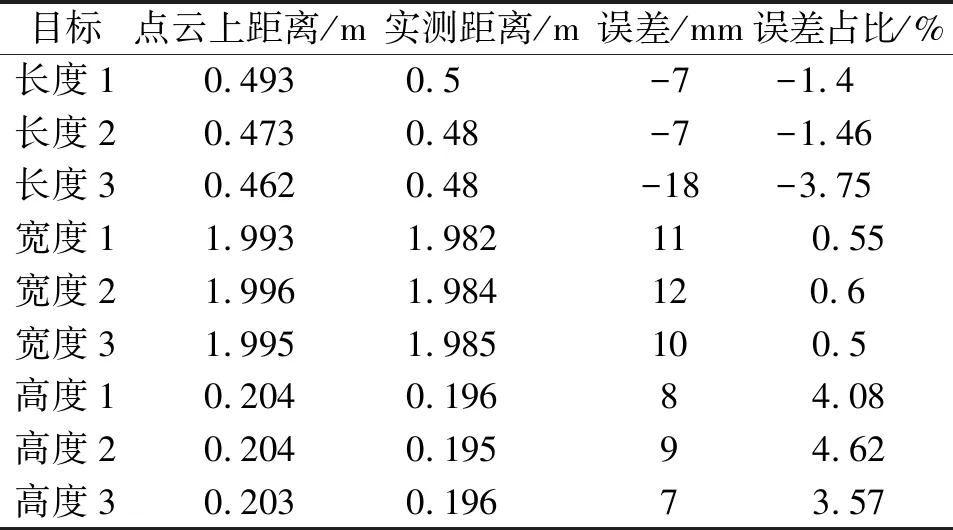
表1 相对精度分析
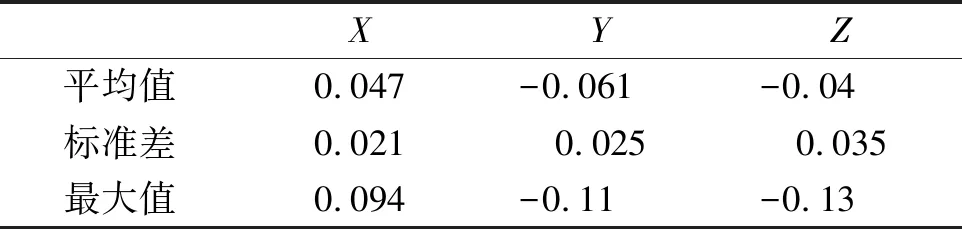
表2 特征点点云坐标与实测坐标误差统计/m
实验结果表明,经过一体化集成与完善后的移动测量系统,点云数据的绝对精度和相对精度能满足移动测量系统数据采集与点云应用的需求。
4 移动测量系统的应用
4.1 街景系统发布
车载移动测量系统采集的数据,主要成果为反映物体空间信息的三维点云,其精度一般在厘米级,是制作道路地图的一种重要数据源。而在绘制道路地图过程中,绘制地图分辨交通标志标线的属性存在一定问题,比如无法确定标线的颜色、交通标志的位置、语义等,需要基于位置准确的点云强度信息矢量化,此时就需要参照实地相片来辅助绘图,并检查是否有缺漏的情况。而全景相片结合导航系统提供的位置信息,以街景的形式发布在网站上,通过地图位置来关联全景相片之后,能够提供路面的详实语义信息,为制图工作带来极大的便利,系统界面如图7所示。

图7 街景系统界面
通过该街景系统,将全景相片与地理坐标相关联,使得点云与相片间的互动成为可能,解决了车载点云绘制道路地图中出现的问题,发挥出了全景相机更大的使用价值。
4.2 点云的配色
扫描仪采集的点云,只有每个点的时间、坐标和强度信息,而没有RGB色彩信息。通过全景相机采集的全景影像不仅拥有色彩信息,还能通过与之同步的GPS数据和点云相关联,在经过标定后的全景影像应用像方投影投射到三维点云中,就可为点云赋色。图8、图9为配色前后的点云。

图8 配色前点云

图9 配色后点云
4.3 车道级道路底图的制作
通常来说,基于普通地图的GPS导航定位精确度在5 m左右,完全不能满足自动驾驶的需求。而车道级地图凭借“高精”的特性,可按厘米进行精确定位。可以说,车道级地图、高精导航就是自动驾驶车辆的重要组成部分。通过车载移动测量系统采集的数据融合后得到的三维点云,利用CAD进行图形的绘制,最后利用GIS工具绘制最后的道路底图,可以得到所需要的车道级道路底图,如图10所示。通过该高精度的车道级底图,可作为无人驾驶汽车的导航依据。
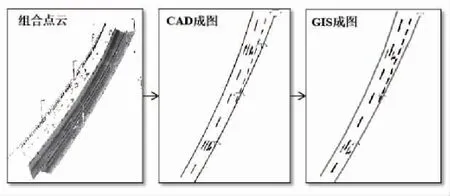
图10 从点云数据到GIS成图的示例过程
4.4 路面坑槽的检测
高速公路上经常有大型车辆行驶,导致路面结构局部过早产生疲劳裂缝,在雨水侵蚀作用下发展为坑槽,成为严峻的安全隐患。通过移动测量系统进行目标路段的数据采集,提取路面上的坑槽信息,之后应用Arc GIS Server、Arc GIS API for Java S-cript等Web GIS相关技术实现了高速路路面坑槽信息的发布,方便路面维修工作的进行,减少道路交通安全隐患[10]。坑槽检测系统如图11所示。

图11 路面坑槽检测系统
5 结 语
本文详细介绍了一套车载移动测量系统的更新换代与优化历程,并且通过实验验证了系统点云的精度,能够满足移动测量系统数据采集与点云应用需求。同时,系统还具有安装简便、采集快速、处理高效、成果丰富的特点,有很大的应用空间,在街景系统发布、点云赋色、车道级道路地图的制作及路面坑槽检测等方面有着突出贡献。在后续的研究当中,会对点云的处理算法再进行优化,减少外部因素的影响,进一步提高点云精度,提升系统的实用价值。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
汽车实用技术(2022年10期)2022-06-09
家庭影院技术(2020年11期)2020-12-28
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
模具制造(2019年3期)2019-06-06
英美文学研究论丛(2018年1期)2018-08-16
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05
现代营销·经营版(2015年3期)2015-04-20
