
无人机倾斜航测技术和SLAM移动测量技术融合在测制1:500地籍图中的应用*
2020-11-02 11:43张天巧
矿山测量 2020年5期
张天巧
(广州建通测绘地理信息技术股份有限公司,广东 广州 510663)
伴随中国的经济水平的提高以及社会不断发展建设,科学技术水平也逐渐发展进步,促使各种新技术不断被研发,并应用到各个领域之中。现代测绘技术[1]也在不断完善和创新,进而对现代工程测绘工作带来了重要的意义。相关部门应该针对新技术对现代测绘技术的影响进行分析和研究,并对现代测绘技术的发展方向做出明确的判断,这样才能够不断提高工程测绘工作的水平和质量,促进我国社会的建设和经济发展。
近几年,测绘地理信息技术飞速发展,数据获取方式越来越便捷,无人机技术的创新与发展,也受到了越来越多人的关注。无人机倾斜摄影技术是在无人机上搭载微型倾斜相机,从垂直、倾斜等不同角度进行高分辨率的倾斜航空摄影数据采集,并根据倾斜影像批量提取及贴纹理的方式进行三维实景建模[2]。SLAM移动测量技术也从室内走向室外,可快速获取高精度、高密度的点云数据,在点云数据[3]上进行高精度数据采集。两种技术的融合更是为高精度地籍图的生产提供了可能。
1 无人机倾斜航测技术和SLAM移动测量技术
无人机倾斜摄影测量技术是近年来发展起来的一项高新技术,倾斜摄影技术[4]三维数据可真实反映地物的外观、位置、高度等属性; 借助无人机,可快速采集影像数据,实现全自动化三维建模; 倾斜摄影数据是带有空间位置信息的可量测影像数据,能同时输出DSM、DOM、TDOM、DLG 等多种成果,传统航空摄影只能从垂直角度拍摄地物[5],倾斜摄影则通过在同一平台搭载多台传感器,同时从垂直、侧视等不同的角度采集影像,有效弥补了传统航空摄影的局限。
SLAM (Simultaneous Localization and Mapping), 即时定位与地图构建,或并发建图与定位。将一个激光扫描仪放入室内、隧道等空间内,让激光扫描仪一边移动一边逐步描绘出此环境完全的地图,所谓完全的地图(a consistent map)是指不受障碍可进入的空间的每个角落。
SLAM三维激光扫描系统,最大的用途是可以进行实时移动式的测量,快速进行数据采集,其主要是依靠SLAM算法。SLAM三维激光扫描系统是由激光扫描仪( Laser Scanner)、惯性测量单元( Inertial Measurement Unit,简称IMU)[6]与SLAM算法( Simultaneous Ocalization and Mapping)三个主要要素组成。
SLAM算法是这三大主要要素中最重要的,SLAM算法的好坏决定了解算出的移动轨迹的精准度,移动轨迹的精准度决定了空间场景三维数据的精准度。SLAM算法根据激光测距仪[7]所获得三维数据中时间轴上共同的特征点加上IMU获取的姿态数据,进行实时解算设备从出发点移动的距离、角度信息,逆向的构建连续的空间场景数据。即被动式依据当前周围场景的数据实时计算出连续的空间数据。
手持式SLAM移动激光扫描系统 GEOSLAM ZE3- REVO RT具备以下特点:
(1)移动测量
设备可适用于各种环境,尤其是复杂及封闭的空间,无需GNSS。灵活的接口和放置方式使得ZEB-REVO可以手持,安装在无人机、机器人上,或安装在杆上以探入孔洞。重量仅有1 kg,手持即可扫描多层空间,并基于最高P64的防护等级,设备可经受严苛环境的考验。
(2)智能高效
ZEB-REVO具备内置MF模块,智能手机或平板连接该设备FI,即可通过网页进入控制界面,实时显示扫描点云和轨迹,数据通过MF可直接下载,操作简单快捷。只要几分钟培训,任何人都可以操作ZEB-REVO,测点速率高达43 000点/s,快速生成3DBIM。
(3)经济高效
传统方式十倍的效率获取并建模复杂环境数据,可以成功在最短时间内完成项目,无需间断。比传统测量方式或静态扫描仪更快的速度,大大节省测量时间。ZEB-REVO也是已有扫描硬件的强有力补充,相互结合,使作业更高效。
2 无人机倾斜航测技术和SLAM移动测量技术融合测制1:500地籍图
2.1 数据获取
该技术将无人机技术[8]与倾斜摄影技术有效结合,自主研发完成了一套微型无人机倾斜摄影系统,包括电动六旋翼无人机、多镜头倾斜相机、降落伞模块、控制模块等。
选用 AC1200 六旋翼无人机。该微型无人机经行业权威专家组织鉴定达到国际先进水平。
使用微型地籍摄影平台,适用于微型无人机进行综合法地籍测量,影像分辨率最高可达1 cm。
摄影组进场后,根据申请的空域批文,向所属空管单位提出飞行计划申请。注意与空中管制单位沟通好作业飞行的航摄区域、航摄高度、航摄时间等要素。航线设计如图1所示。

图1 航线设计
航飞作业 :(1)像片重叠度:由于数码相机完全实现定点曝光,综合法地籍测量航向重叠度为 80%,旁向重叠度为 80%。
(2)航线弯曲度:航线弯曲度不大于 3%。
(3)航高保持:航高应满足以下要求:同一航线上相邻像片的航高差不应大于20 m,最大航高与最小航高之差不应大于30 m;航摄分区内实际航高与设计航高之差不应大于50 m;当相对航高大于1 000 m时,其实际航高与设计航高之差不得大于设计航高的5%(100 m)。
(4)数据整理及质量检查:当天航飞结束后,作业人员应在返回驻地后及时对数据进行备份整理并完成数据的初检工作。
SLAM移动测量技术获取数据:偏远地区的街道没有GPS信号,手持ZEB-REVO边走边扫,快速采集街道轮廓,使用pointcab即可绘制出道路边界线,如图2所示。
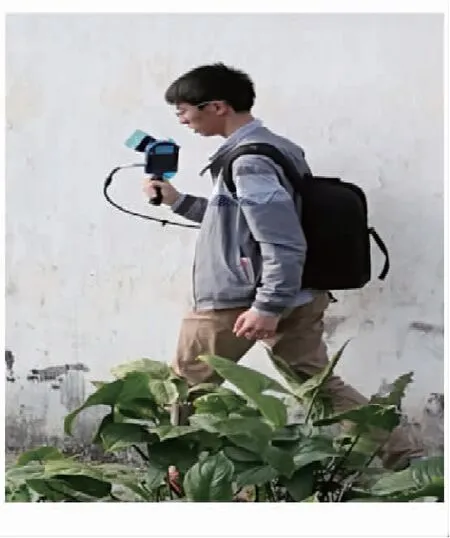
图2 绘制道路边界线
2.2 数据处理
利用倾斜影像制作三维真实场景前,需要利用倾斜数据处理软件进行前期的数据处理,生成一些制作三维真实场景所需的中间产品。
主要步骤如下:
(1)控制场处理:创建工程、量测控制点、相机角度计算、结果发布。
(2)试验场处理:创建工程、影像质量检查IQC、准确性质量检查AQC、处理质量检查PQC、正射纠正、成果检查及分发、自动匀色及Mosaic、成果检查及分发、为用户添加image license并检查等。
(3)数据分块:倾斜摄区模型制作的计算任务量较大,为提高数据处理速度,处理过程中将摄区分割成N个模型小块进行处理。
(4)根据航摄获取的影像数据进行TIN制作和纹理映射,多结点并行处理,获得三维模型成果,如图3所示,可极大提高三维成果制作效率。
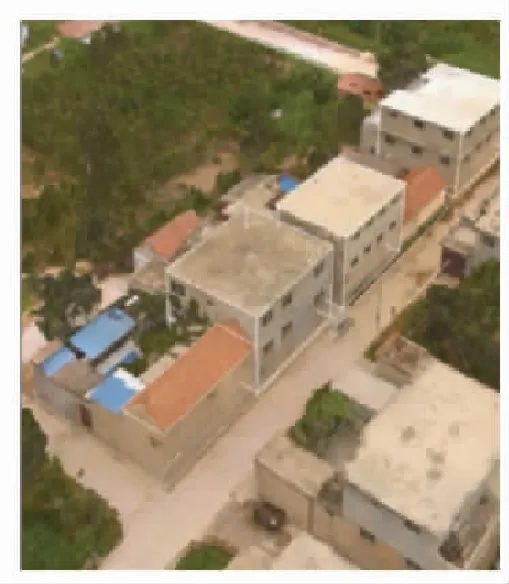
图3 三维模型成果
(5)使用SLAM 桌面软件自动SLAM算法处理。输出标准的LAS的点云格式,可用于其他点云处理软件。
(6)数据融合测制1:500地籍图
将前期获取的倾斜三维模型[9]和SLAM 获取的点云导入同一个制图平台,融合两种数据进行1:500地籍图的采集。
①在倾斜模型上采集房屋的边线和部分明显的附属设施边线[10],在点云数据上判断不同附属设施结构的位置,根据点云密集情况进行绘制[11]。
②根据倾斜模型绘制独立地物、道路、水系、植被等地物,如图4所示。根据点云数据绘制陡坎、斜坡、等高线,高程注记点[12]等。

图4 水系
③要素采集内容包括居民地及设施、交通、水系、水塘、注记、植被、地貌等,施测内容的选取与取舍按照 1:500地籍图的要求执行。基础控制点宜按坐标准确导入。
④要素采集的平面位置精度和高程精度应符合规定要求。要素的几何类型和空间拓扑关系应正确。点状要素采集定位点;线状要素采集定位线, 且应保持连通性,相交处形成结点,不应自重叠、自相交;面状要素采集外围轮廓线,并闭合。有向点和有向线的方向应正确。公共边宜以主要要素为准采集一次,次要要素的公共边拷贝生成。要素采集应不移位、无错漏。
⑤对于村镇之间的道路、水系等地形地物,采用内业三维测图的方法施测。 道路的宽度宜大于 3 m,水系宽度宜大于 8 m。当相邻城镇村庄之间存在多条道路时,最多提取 2 条主要的道路。但居民点之间的连接、村庄出行的主要道路应当提取。当线状水系密度较大时,提取主要的水系。
⑥村庄范围线测量,采取在 1:500 数字正射影像图上按照居民点范围向外扩大 30~50 m 的方式提取,并在调查期间进行修正。
⑦按测图范围采集的数据以标准图幅范围进行数据裁切。三维测图数据应先经补测、检查再提供调绘使用。
2.3 精度验证
本项目采用挂载地籍测量相机进行倾斜航空摄影,获取测区内全区1.33 km2面积区域的数字航空摄影真彩色影像数据,提供最终成果数字线划图,如图5所示。完全覆盖整个测区。

图5 数字线划图
外业检查采用抽查方式,进行实地巡视,平面对定向点检查无误后,再测量房角、围墙角、道路边线等平面地物特征点,与线划图同名点进行比对,计算线划图中误差,测区内检查线划图36处,其中桃源镇检查8处,实测检查点135个,平面中误差为0.090 m,小于限差0.15 m,龙溪村检查28处,实测检查点298个,平面中误差为0.080 m,小于限差0.15 m,符合规范要求。
3 研究总结和展望
(1)融合多种先进技术,技术水平高
该项技术融合了无人机倾斜航测技术和SLAM移动测量技术,根据不同技术的优缺点,实现了优势结合,大大提高了产品精度。先进的技术带来了优质的产品。
(2)外业工作内业化,降低了劳动强度,提高了作业效率
该项技术实现了外业现场测量工作变成了无人机倾斜航测和SLAM移动扫描,大大减少了外业工作量,降低了劳动强度,把调绘的大部分工作转为室内进行,提高了工作效率,降低了成本。
(3)建立了新的地籍图生产工艺,实现了地籍图的快速制图
融合无人机倾斜航测技术和SLAM移动测量技术是当前的研究热点,也是测制大比例尺地形图和地籍图的关键技术,尤其随着数字城市和智慧城市建设的不断推进,对数据获取和更新提出更高的要求,无人机倾斜航测技术和SLAM移动测量技术在这方面有着很大的优势,具有很好的应用前景。
猜你喜欢
当代水产(2020年4期)2020-06-16
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14
山东青年(2016年2期)2016-02-28
债券(2015年9期)2015-09-29
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11
解放军生活(2009年10期)2009-11-16
