
隧道激光三维扫描监控量测数据处理方法研究
2020-10-29 08:56:10刘治海
铁道建筑技术 2020年8期
刘治海
(中铁二十二局集团有限公司 北京 100043)
1 引言
隧道变形监测,是隧道施工关键技术之一,隧道监控量测在指导钻爆法等的施工过程中,对判定设计支护参数、施工方法的合理与否起到决定性的作用。目前,在获取围岩变形量的测量手段上,绝大部分隧道主要采取机械收敛计(部分结合水准仪)量测、全站仪非接触量测两种方法[1]。这两种监测方法获取的变形信息并不能全面反映出隧道的实际变形情况,同时存在成本大、危险性高、精度较低等缺点。需要一种测量数据采集与处理方法,达到运算快速,又能高精度表现隧道整体变形情况。
2 传统变形监测方法
(1)收敛计结合水准仪量测法
该方法主要存在如下缺点:需要机械设备的配合,成本大、危险性高、量测精度低,且对现场施工干扰大;需要埋设的观测环易被触动变形,甚至破坏,影响测量准确度和连续性;将有限的特征点变形代表整体的实际变形不准确等[2]。
(2)全站仪非接触量测法
全站仪非接触量测法目前在隧道施工中已得到普及,是最主要的变形量测方法。存在以下缺点:需要作业平台埋设反射贴片,作业效率有待提高;反射贴片易被破坏,表面布满灰尘影响测量准确度和连续性;将有限的特征点变形代表整体的实际变形不准确[3-4]。
(3)三维点云扫描技术
近年来出现的三维点云扫描[5]和摄影测量技术[6],为解决上述问题带来了契机。能进行点云扫描的设备包括三维激光扫描仪(如FARO-3D三维激光扫描仪)、扫描全站仪(如徕卡MS50)等。这些点云技术已较广泛应用于地形测绘、建筑物轮廓扫描,但目前在隧道仍无大规模应用。阻碍其在隧道监控测量推广应用的技术障碍主要在于:虽然FARO-3D激光扫描仪、扫描全站仪等能以较高密度采集到隧道岩面的三维坐标[7],但由于隧道岩面不平整,为准确表达这些不平整的凹凸细部表面,就必须尽量以更高密度的点云来表达,而不能像常规地形测绘那样以稀疏的点来表达地表,但全部、多期保留这些点云数据,海量的点云数据给存储、运算、显示等带来极大的困难,甚至是系统崩溃。
3 三维扫描监控测量数据处理措施研究
针对传统变形监测存在的缺点,有必要研究出一种具有三维扫描用于隧道监控量测的数据采集与处理方法,以解决其技术难题[8]。
3.1 采集小区划分
根据实际需要,按一定的规则将待监测表面划分为若干个小区,在小区内任意位置划分一个更小的点云区域[9],以点云区域作为高密度点云数据采集和存储的范围,如图1所示。
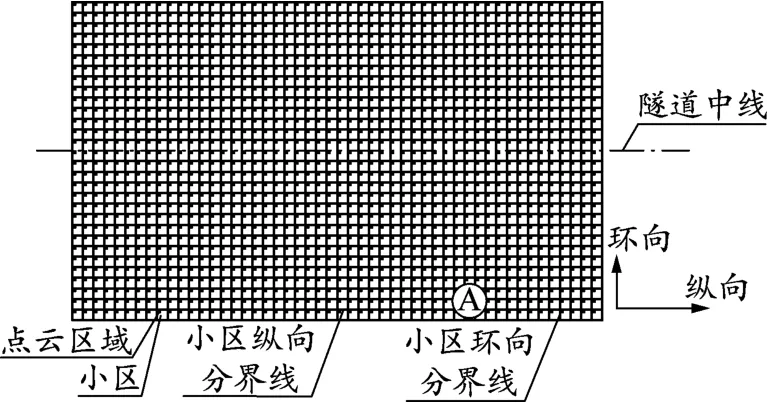
图1 隧道沿拱顶展开示意
选择与实际监测表面较接近的理论表面沿线路按里程纵向分割、沿横断面上的理论轮廓线等距离环向分割,形成网格状。如可沿隧道设计线路按里程每间隔1 m为一个单元进行纵向分割,以拱顶为起点沿横断面上的理论轮廓线每间隔1 m为一个单元进行环向分割,将这些1 m×1 m的区域作为小区,根据隧道施工经验或地质条件等影响因素可知,这些1 m2的每个小区范围内,变形基本一致。倘若地质变化复杂,或者以更高分辨率来表现隧道变形情况,还可将小区设为更小区域。反之,当地质条件变化小,几平方米甚至是几十平方米范围内变形值基本一致时,或者为了少占用存储空间、快速运算,也可以将小区设更大的区域面积。
在小区内取一点云区域作为高密度点云数据采集和存储的范围,点云区域的面积一般取数平方厘米至数平方分米,如0.05 m×0.05 m,位置可在小区的中央、四角等任意位置。针对各小区采集最少一期点云区域的高密度点云数据作为初始点云数据,采集后续多期点云区域内的点云或若干个点。
在采集高密度点云时,若采用三维激光扫描仪,可全景扫描测站周围实际监测表面,对扫描得到的点云按上述分区进行分区计算、去噪,仅保留各小区内的点云区域的点云数据,舍弃点云区域外的点云数据;若采用扫描全站仪,可控制全站仪扫描点云区域范围内的区域。采集完高密度点云数据作为初始点云数据后,后续采集数据时可采用三维激光扫描仪、扫描全站仪、摄影测量获得较稀疏的点云或普通全站仪测量点云区域的若干个点。在采集多期点云区域的点云或若干个点的过程中,首先以第一期扫描的点云数据作为初始点云数据,当第一期扫描的点云数密度达不到密度需求时,可将后续点云或若干个点进行变形量修正后叠加到第一期扫描的点云数据作为初始点云数据。
在实地扫描时,由于受监测表面不平整、障碍物遮挡等原因的影响,有可能监测设备采集不到预先设定的点云区域位置的监测表面初始点云。对任何一个小区而言,其内部的点云区域可以在小区的任意位置,因而可改变预先设定的点云区域位置到小区内可采集的点云位置。在极端情况下,整个小区均采集不到点云,此时可将小区相邻小区的变形值作为其变形值也是可以的,或者标记该小区为未监测区,存在少部分采集不到点云的小区也不会影响整体的监测情况。另一方面,有些区域即使有能采集到小区内点云区域的初始点云的条件,也可将这些区域列为不监测区。例如隧道底部往往存在虚渣、浮土等,也没有必要将隧道底部列为扫描监测区。
3.2 扫描点与区域关系的计算
在计算实际监测表面上的某个扫描点Pi对应于理论表面上的小区内和不在该小区相对应的点云区域内时,可采用沿扫描点所在横断面的理论轮廓线上的法线投影到理论轮廓线的方式(下称法线投影)。法线投影计算方法如图2所示。
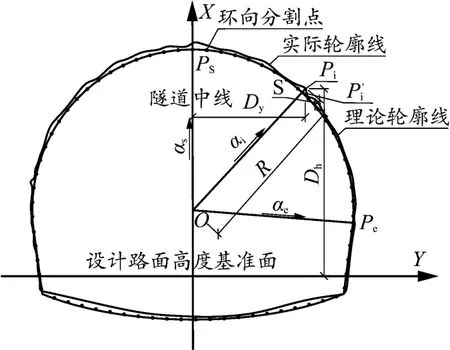
图2 法线投影计算法示意
首先,以设计线路中线或隧道中线与对应的设计路面交点为原点O,竖直指向拱顶方向为X轴,右旋90°为Y轴建立断面独立坐标系。
然后,根据隧道平曲线和纵坡参数和Pi的三维坐标计算Pi的里程值Li、与设计线路或隧道中线的横向偏距Dy、与设计路面高度基准面的高差Dh。Dh、Dy实际为在断面独立坐标系下的X轴、Y轴分量,即Pi的断面独立坐标为Pi(Dh,Dy)。依里程值Li和纵向划分规则可知Pi位于纵向的哪一区。
最后,依设计图可查得理论轮廓线对应各圆弧圆心坐标O(XO,YO)、圆心到各圆弧始点及终点的方位角αs、αe和半径R,计算圆心到Pi的方位角αi,进而根据αi与αs的夹角和R可推算出Pi投影到理论轮廓线的交点P′i到始点的弧长,依推算的弧长以及环向划分规则可知P′i位于环向的哪一区,同时也可计算Pi到理论轮廓线的距离S(即P′i-Pi的距离)备用,S=[(Dh-XO)2+(Dy-YO)2]1/2-R。有时理论轮廓除了圆弧外,还有直线,依设计图可查得直线起点及终点坐标Ps(Xs,Ys)、Pe(Xe,Ye),然后根据其与Pi的关系可计算出Pi投影到直线PsPe的投影点到Ps的距离并可计算Pi到PsPe的垂直距离S备用。依此推算的距离以及环向划分规则可知P′i位于环向的哪一区。理论轮廓线大多时候会有多于一段圆弧或/和直线,需注意判断Pi应位于哪一段圆弧或直线范围内,判断标准为Pi距离圆弧或直线最近的那一段;大多时候,若环向划分规则为等距或等角,那么每段圆弧弧长或/和直线长就极有可能不会恰好为等距或等角的整数倍,在S1的环向划分时需注意此种情况,可以采用一个小区部分为前一段圆弧或/和直线、部分为下一段圆弧或/和直线或调整划分规则的方法解决[10]。
同理可计算Pi是否位于点云区域内,以及位于点云区域的纵向、环向什么位置。
将第一期以后各期采集到的点云或若干个点与初始点云数据进行计算对比,计算各期、各小区的累计变形量以及变形速率。
为达到高速、准确的效果,应将点云区域再次细分成若干个微单元区域并对初始点云进行叠加、抽稀,方法见图3。
如图3所示,将点云区域按类似小区的方式纵向、环向划分为更细的微单元区域,这些微单元区域面积一般可取1 mm2至几十平方毫米甚至是更大,区域的大小取决于岩面的平整度或变形监测的精度要求,表面平整、精度要求低时面积可取较大值,反之取较小值。每个微单元区域记录1个初始观测值信息,多于一个初始观测值时,可取均值或舍去多余值。一般第一期扫描时应按高密度的方式进行扫描,当第一期采集的点云数据未扫描到该微单元区域时,可依后续第二期的该微单元区域观测值以及相邻微单元区域变形值来修正为第一期虚拟观测值。同理当第二期采集的点云或若干个点未扫描到该微单元区域时,可采用第三期的观测值进行修正,直至扫描到该微单元区域或不再监测。
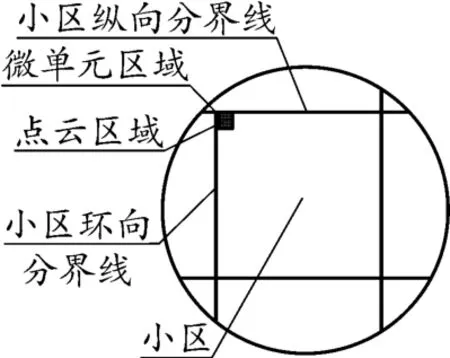
图3 微单元区域示意
以三维图形的形式或以报表的形式展示变形情况。选取需要展示段落或区域范围内各小区区域内的最少1个任意理论表面上的点或对应实际扫描点,以这些较稀疏的点来绘制三维图形,并以不同颜色或以等高线(同一等高线上变形量相同)的形式来表示不同的变形量或/和变形速率,必要时输出报表[11]。当计算机性能较低或没必要以相对较精细的小区来表现所选取需要展示段落或区域范围的变形情况时,可将若干个小区合并成较大的区域,合并计算变形量或/和变形速率,选取各合并后的区域内最少1个任意理论表面上的点或对应实际扫描点,以这些更稀疏的点绘制三维图形。
4 数据处理步骤
将三维扫描点云用于隧道监控量测,主要包括以下数据采集与处理步骤:
第一步:分区。将待监测表面划分为若干个小区,在小区内任意位置划分出一个更小的点云区域。
第二步:采集初始点云数据。针对各小区采集最少一期点云区域的高密度点云作为初始点云数据。
第三步:后期测量数据的采集。采集后续多期点云区域内若干个点。
第四步:计算变形量结果。将第三步采集的若干个点与第二步的初始点云数据进行计算对比,计算各期、各小区的累计变形量或/和变形速率。
第五步:变形量输出。变形量或/和变形速率以三维图形或/和报表的形式展示。
5 结束语
本文重点研究三维扫描点云数据采集与处理方法,能解决点云抽稀、初支岩面不光滑带来的矛盾,即运算效率与量测精度的矛盾[12]。该方法适于计算机编程计算,方便三维扫描监控量测系统开发,在实际应用中能全景展示隧道变形情况,更真实表现隧道实际变形,为隧道设计、施工提供有力支持,该技术具有广阔推广前景。
猜你喜欢
山东农业大学学报(自然科学版)(2023年5期)2023-12-01 02:23:50
特种结构(2022年6期)2023-01-12 09:17:02
建材发展导向(2022年4期)2022-03-16 06:11:48
北京测绘(2020年12期)2020-12-29 01:37:18
科学技术创新(2020年6期)2020-04-18 06:17:46
工程与建设(2019年3期)2019-10-10 01:40:18
水利科技与经济(2018年12期)2019-01-07 03:35:26
管道行业观察(2016年12期)2016-09-12 12:16:18
电测与仪表(2016年9期)2016-04-12 00:29:52
机械工程师(2015年10期)2015-02-02 01:13:57
