
基于主动悬挂的车载稳定平台调平系统设计与试验
2020-10-29 11:20:38郭庆贺赵丁选
农业机械学报 2020年10期
郭庆贺 赵丁选
(燕山大学机械工程学院, 秦皇岛 066004)
0 引言
目前,轮式起重机、混凝土搅拌车和消防车等工程机械、救援装备的车载稳定平台调平系统多采用刚性支腿调平装置[1-6]。刚性支腿调平装置结构简单、易操作、易控制,但调平时需将其先伸出、再调平,调平耗时较长。在执行救援任务时,调平时间过长,则会滞缓消防车救援进程,造成生命和财产损失。在工程建筑中,要求轮式起重机能在吊重过程中行走,若遇路面不平,则会造成车载平台及起重臂架侧倾,导致起吊重物大幅摆动,严重时会发生碰撞或倾翻,导致事故发生,而刚性支腿仅能在驻车调平时使用,无法满足边行走、边调平功能的需要。
国外对调平系统的研究相对较早。HOEHN等[7]研究了一种应用于耕作机具的调平系统,在作业过程中可实时调节耕作机具与地面的高度,有利于保持恒定的土壤切削深度;KIM等[8]研究了一种控制挖掘机机架自动调平的系统和方法,可使上机架在挖掘机静止或移动中均能保持水平;PIJUAN等[9]设计了一种使车辆底盘高度可调的悬挂机构,该机构使车辆具有较强的越障能力,但对底盘调平精度没有过高要求;XIE等[10]研制了一种二自由度高度控制器,将其应用于联合收获机割台高度控制,可实现收割过程中割台高度的实时调节。目前,国内对行车过程中调平系统的研究多集中于农机具的调平[11-14],对车载稳定平台调平系统的研究大多集中在驻车刚性支腿调平系统[15-18],鲜见对行车过程中保持车载稳定平台水平的调平系统研究。本文基于主动悬挂技术设计一种调平系统,以期使车载稳定平台在驻车或行车时均能保持水平状态。
1 调平系统结构与工作原理
1.1 系统结构组成
基于三轴六轮车辆底盘进行车载稳定平台调平系统的设计,如图1所示。该系统主要由车体、车载稳定平台、惯性测量单元(Inertial measurement unit, IMU)、控制系统、液压系统、悬挂作动油缸以及与悬挂作动油缸一一对应的位移传感器等组成。
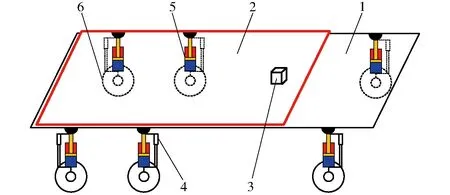
图1 车载稳定平台调平系统结构示意图Fig.1 Structure diagram of vehicle-borne stabilized platform leveling system1.车体 2.车载稳定平台 3.IMU 4.位移传感器 5.悬挂作动油缸 6.车轮
1.2 工作原理
车载稳定平台与车体固连;惯性测量装置固定在车载稳定平台上,用于测量车载稳定平台的俯仰角和侧倾角;车轮通过悬挂作动油缸连接于车体下方;位移传感器用于测量悬挂作动油缸的伸缩行程;电控系统分别与惯性测量单元和位移传感器通信连接,用于接收信号和输出控制信号;液压系统用于接收来自电控系统的控制信号并控制悬挂作动油缸动作。
车辆行驶过程中,车体姿态因路面不平发生改变,导致车载稳定平台不再处于水平状态,产生一定的俯仰角和侧倾角,电控系统读取惯性测量单元测得的俯仰角和侧倾角,并依此计算使车载稳定平台恢复水平所需的各悬挂作动油缸伸缩量,并将伸缩量控制信号输出至液压系统控制各悬挂作动油缸伸缩,最终使车载稳定平台恢复至原水平状态。车载稳定平台调平系统工作原理如图2所示。
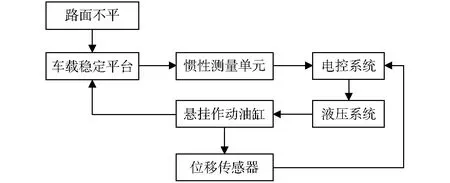
图2 车载稳定平台调平系统工作原理图Fig.2 Schematic of vehicle-borne stabilized platform leveling system
2 调平系统设计
2.1 调平算法设计
2.1.1平台支撑结构
按支撑点数量划分,平台支撑结构可分为三点支撑、四点支撑或多点支撑[19-21]。四点或多点支撑因存在冗余约束易产生“虚支撑点”,可导致平台发生倾覆,且支点数量越多,控制过程越复杂。由数学定理知,空间中不共线的3点可以确定一个唯一的平面,即三点支撑不存在冗余约束,不会产生虚支撑点。因此,采用三点支撑作为车载稳定平台支撑结构,并在此基础上设计调平算法。
2.1.2调平算法
目前,采用刚性支腿结构对车载稳定平台进行调平的算法主要分为:基于位置误差的调平算法和基于角度误差的调平算法。其中,基于位置误差的调平算法主要包括“追逐式”调平算法、“中心不动”调平算法和“设定点不动”调平算法[22]。“中心不动”调平算法是指在调节车载稳定平台各支腿时,以支撑点围成的几何图形中心的高度为基准,调节各支腿的伸缩,使各支撑点与几何中心处于同一水平高度,从而达到恢复平台至水平状态的目的。以三点支撑结构为例,“中心不动”调平算法的调节过程如图3所示。相比其他算法,采用“中心不动”[23]调平算法调平时支腿伸缩距离最短,且调节精度高、调节速度快,因此,本文采用“中心不动”调平算法对车载稳定平台进行调平控制。
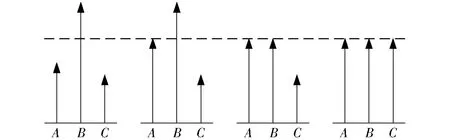
图3 “中心不动”调平过程示意图Fig.3 Schematic of leveling process based on geometric center
依据“中心不动”调平算法对车载稳定平台进行调平首先对当前车载稳定平台进行姿态分析,然后根据当前姿态信息计算平台恢复至水平状态所需的悬挂油缸伸缩量。设车载稳定平台初始时刻为水平状态,此时车载稳定平台所在平面与大地(海平面)平行。设车载稳定平台处于水平状态时,三支撑点A、B、C所围成的等腰三角形的外心为坐标原点O,以过原点O且垂直于大地水平面(海平面)向上的方向为Z轴正方向,以车辆前进的正前方为X轴正方向,以车辆前进方向的左侧方向为Y轴正方向,建立水平坐标系OXYZ,如图4所示。水平坐标系OXYZ符合右手定则,且无论车辆是在行进中或是静止状态,水平面XOY相对大地(海平面)均始终保持水平不变。
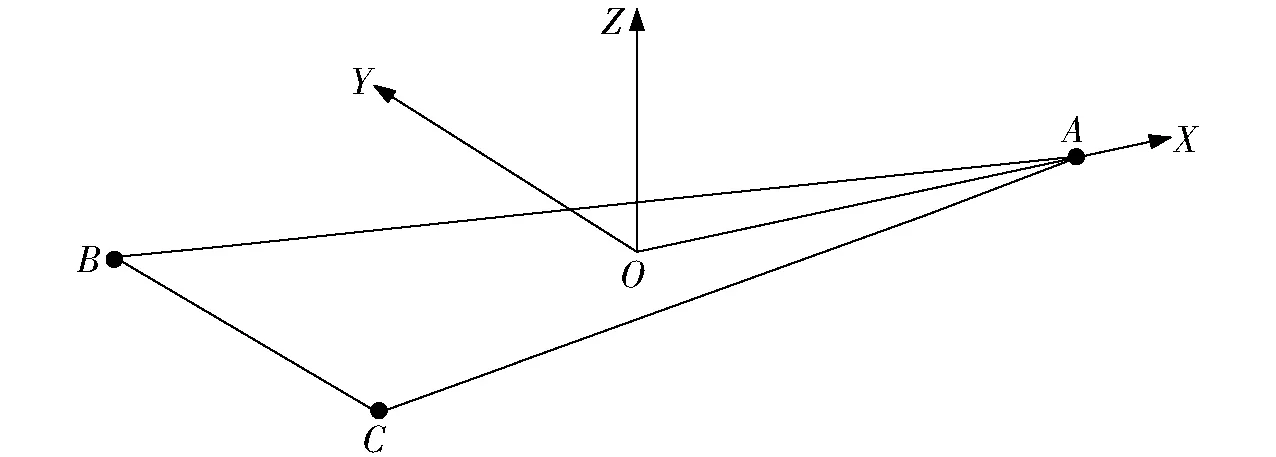
图4 水平坐标系Fig.4 Horizontal coordinate system
当车载稳定平台因路面不平发生倾斜时,其支撑点在水平坐标系OXYZ中的坐标位置也将发生改变,如图5所示。设车载稳定平台倾斜后支撑点的新坐标点为As、Bs、Cs,则其所确定的平面AsBsCs将不再保持水平。设其与水平面ABC在Y轴方向的夹角(侧倾角)为α,在X轴方向的夹角(俯仰角)为β,由空间几何理论知识可知,倾斜面AsBsCs可由水平面ABC以原点O为旋转中心,先绕X轴旋转α,再绕Y轴旋转β得到。

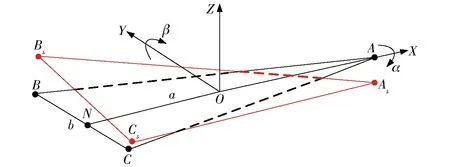
图5 车载稳定平台姿态示意图Fig.5 Attitude schematic of vehicle-borne stabilized platform
(1)

Ms=RM
(2)
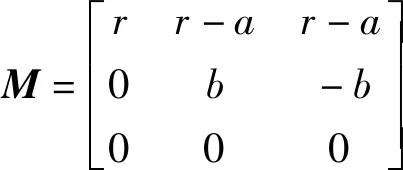
其中
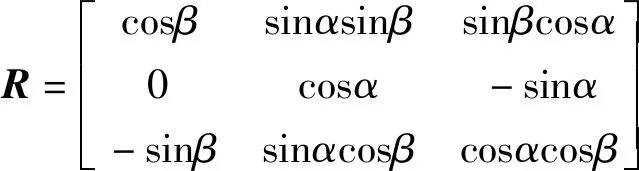
(3)
式中R——空间旋转矩阵
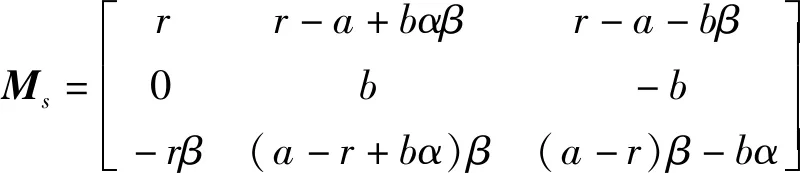
由式(2)、(3)可得
(4)
通常情况下,α和β较小,可以由极限定理近似认为sinα≈α,sinβ≈β,cosα≈cosβ≈1,因此,式(4)可以简化为
(5)
由式(5)可得,车载稳定平台在发生倾斜前后,支撑点As、Bs、Cs相对A、B、C在Z轴方向的变化量为
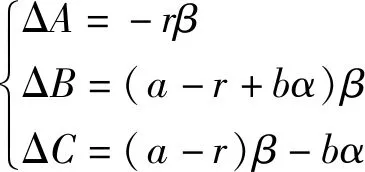
(6)
因此,当车载稳定平台相对水平面XOY发生倾斜产生侧倾角α和俯仰角β时,依据“中心不动”调平算法,欲使平台恢复至水平状态,由式(1)、(6)可得对应各支撑点As、Bs、Cs的悬挂作动油缸伸缩量分别为
(7)
调控时,由电控系统判断lAs、lBs和lCs各值的正负性,若值为正,则系统调控悬挂作动缸活塞杆伸长,相反,则调控悬挂作动缸活塞杆缩短。
2.2 液压系统设计
如图6所示,液压系统包括液压泵、溢流阀、蓄能器、三位四通电液伺服阀和悬挂作动油缸等。发动机变速箱输出轴通过取力器驱动液压泵,为整机液压系统提供动力;溢流阀采用直动式溢流阀,用于保护液压系统,防止系统过载;蓄能器采用隔膜式蓄能器,用于吸收压力冲击和用作液压系统辅助动力源;三位四通电液伺服阀采用航天钧和科技有限公司生产的SFD234型电反馈射流管式伺服阀,伺服阀根据输入电信号对油液的流量和方向进行控制,进而实现对悬挂作动油缸的伺服控制。本文采用三点支撑结构对车载稳定平台进行姿态调控,但本文所用车辆底盘为三轴六轮,拥有6个支撑点,因此需对悬挂作动油缸进行适当耦连,将六点支撑转换为三点支撑。根据油气平衡悬架[25-26]相关结构与特性可知,当一对悬挂油缸的大腔与大腔相连,小腔与小腔相连时,原有悬挂油缸对车体的两支撑点可等效转换为一个虚拟支撑点,该虚拟支撑点位于原两支撑点连线的中间位置。本文所采用的三轴六轮车辆,其6个悬挂作动油缸的结构参数完全相同,因此可将6个悬挂作动油缸划分为3组,前轴左右两侧悬挂作动油缸为第1组,中轴和后轴左侧两悬挂作动油缸为第2组,右侧两悬挂作动油缸为第3组。如图7所示,组内两悬挂油缸的大腔与大腔相连,小腔与小腔相连,由此可将支撑点1和支撑点2等效转换为虚拟支撑点A;支撑点3和支撑点5等效转换为虚拟支撑点B;支撑点4和支撑点6等效转换为虚拟支撑点C。
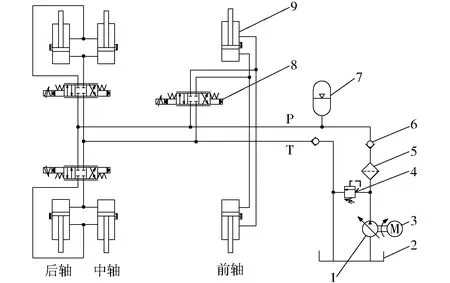
图6 液压系统原理图Fig.6 Schematic of hydraulic system1.液压泵 2.油箱 3.发动机 4.溢流阀 5.过滤器 6.单向阀 7.蓄能器 8.三位四通电液伺服阀 9.悬挂作动油缸
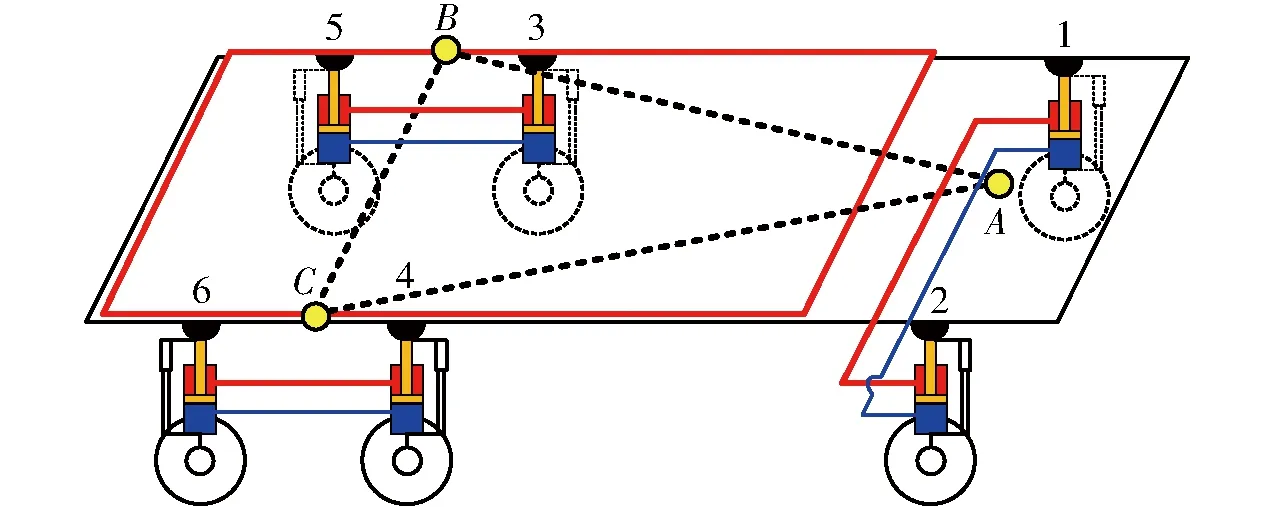
图7 支撑点等效转换示意图Fig.7 Schematic of support point equivalent transform
对虚拟支撑点高度的控制通过控制各组内两悬挂作动油缸活塞杆的平均伸缩量来实现。由于3组悬挂作动油缸结构和连通形式完全相同,因此只取其中1组悬挂作动油缸为例进行说明,其余同理。以第1组悬挂作动油缸(前轴左右两侧悬挂作动油缸)为例,设定该组内两悬挂作动油缸行程中位为活塞杆位移零点,活塞杆初始位置在零点位置,x1和x2分别为两悬挂作动油缸活塞杆位移,活塞杆伸出时x1和x2均为正值,缩回时x1和x2均为负值,两活塞杆平均伸缩量为xA=(x1+x2)/2,当车载稳定平台相对水平面XOY发生倾斜产生侧倾角α和俯仰角β时,对虚拟支撑点As的高度控制量为lAs,此时电控系统将以xA作为虚拟支撑点As的位移反馈量,通过三位四通电液伺服阀调控悬挂作动油缸活塞杆的伸缩,使虚拟支撑点As的最终伸缩量为lAs。
2.3 控制系统设计
车载稳定平台的调平控制系统为闭环系统,如图8(图中α0和β0分别为车载稳定平台目标侧倾角和俯仰角,α和β分别为IMU测得的车载稳定平台实际侧倾角和俯仰角)所示。IMU测得的侧倾角α和俯仰角β信号经滤波和A/D转换后与设定值进行比较求偏差,主控制单元中的悬挂作动油缸位移解算模块根据输入的角度偏差信号进行油缸位移解算,解算所得值与位移传感器测得的位移进行比较求偏差,偏差信号经D/A转换并经伺服放大器放大后到达电液伺服阀,电液伺服阀根据输入的控制量信号控制悬挂作动油缸产生相应的位移,进而调节车载稳定平台恢复水平状态。
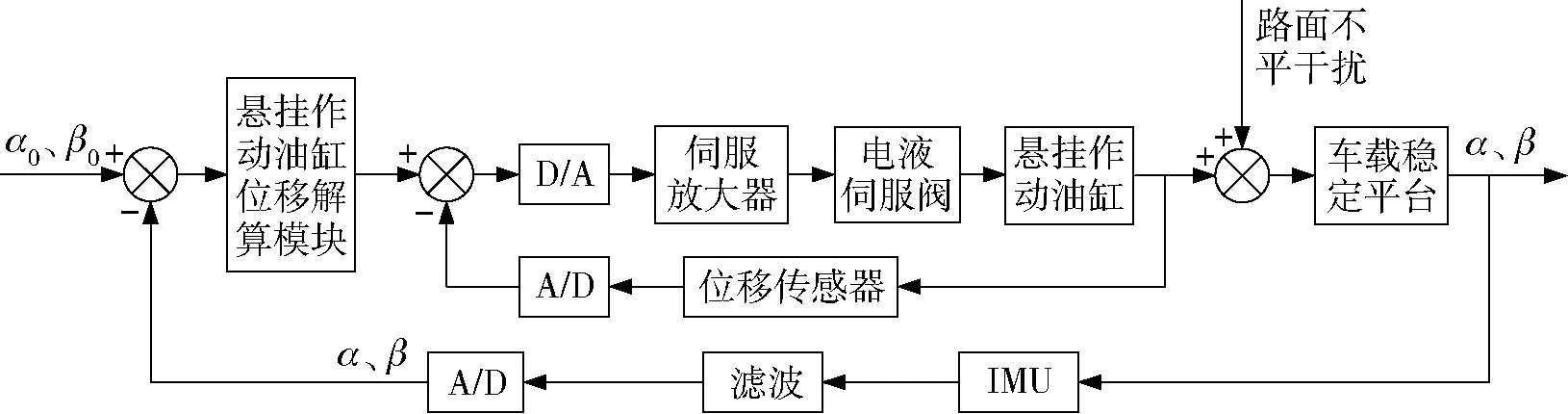
图8 车载稳定平台调平系统控制原理图Fig.8 Principle diagram of vehicle-borne stabilized platform control system
2.3.1硬件设计
作为车载稳定平台调平控制系统的核心部件,工作过程中主控单元需要对传递的各种信号进行实时处理决策,以实现对悬挂作动油缸的精确控制,所以要求其具有良好的反应速度、抗干扰和稳定性。选用盛博科技嵌入式计算机有限公司生产的SCM9022型PC/104主板,其基于Intel Atom N455/D525处理器的超小型嵌入式核心模块,板载DDR3/2GB内存,1.8 GHz,双核,AT模式下+5 V供电,支持VGA+LVDS双显示,具有体积小、低功耗,恶劣环境下可靠性高等优点。数据采集与输出采用盛博科技嵌入式计算机有限公司生产的SysExpandModule/ADT882-AT型采集卡。ADT882-AT型采集卡是基于PC/104的扩展卡,提供32个16位精度和软件可编程输入量程的模拟量输入通道,配合FIFO操作,可达200 kHz的采样速度,其通过PC/104总线与SCM9022型主板通信连接。惯性测量单元采用荷兰Xsens公司生产的MTi 300-AHRS型IMU,其是一款基于卡尔曼滤波融合算法的高精度姿态角测量传感器,其角度传感精度为0.3°。位移传感器采用美国MTS公司生产的MH100型磁致伸缩位移传感器,其可在较为恶劣的工业环境下使用而不会产生损耗。伺服放大器采用自制放大器。
2.3.2软件设计
控制系统的核心部分是软件,软件系统性能将直接影响车载稳定平台的调平速度和精度。采用程序执行效率较高的C语言在Visual C++6.0环境下进行控制软件的开发。车载稳定平台控制系统软件主要由两部分组成,分别是完成系统初始化、故障检测与通信接口控制等功能的主循环程序部分和调平算法程序部分。主程序流程图如图9所示。程序启动后,首先进行系统初始化,检测系统各设备通信连接是否正常,若无设备及通信连接故障问题,则对IMU进行初始化,初始化完成后对IMU和位移传感器进行数据采集并载入数据至缓冲区,悬挂作动油缸位移解算模块读取缓冲区数据并解算,解算完成后发送悬挂作动油缸位移控制指令至伺服驱动器。在控制指令发送完成后,继续读取缓冲区数据并进行解算,更新控制指令。
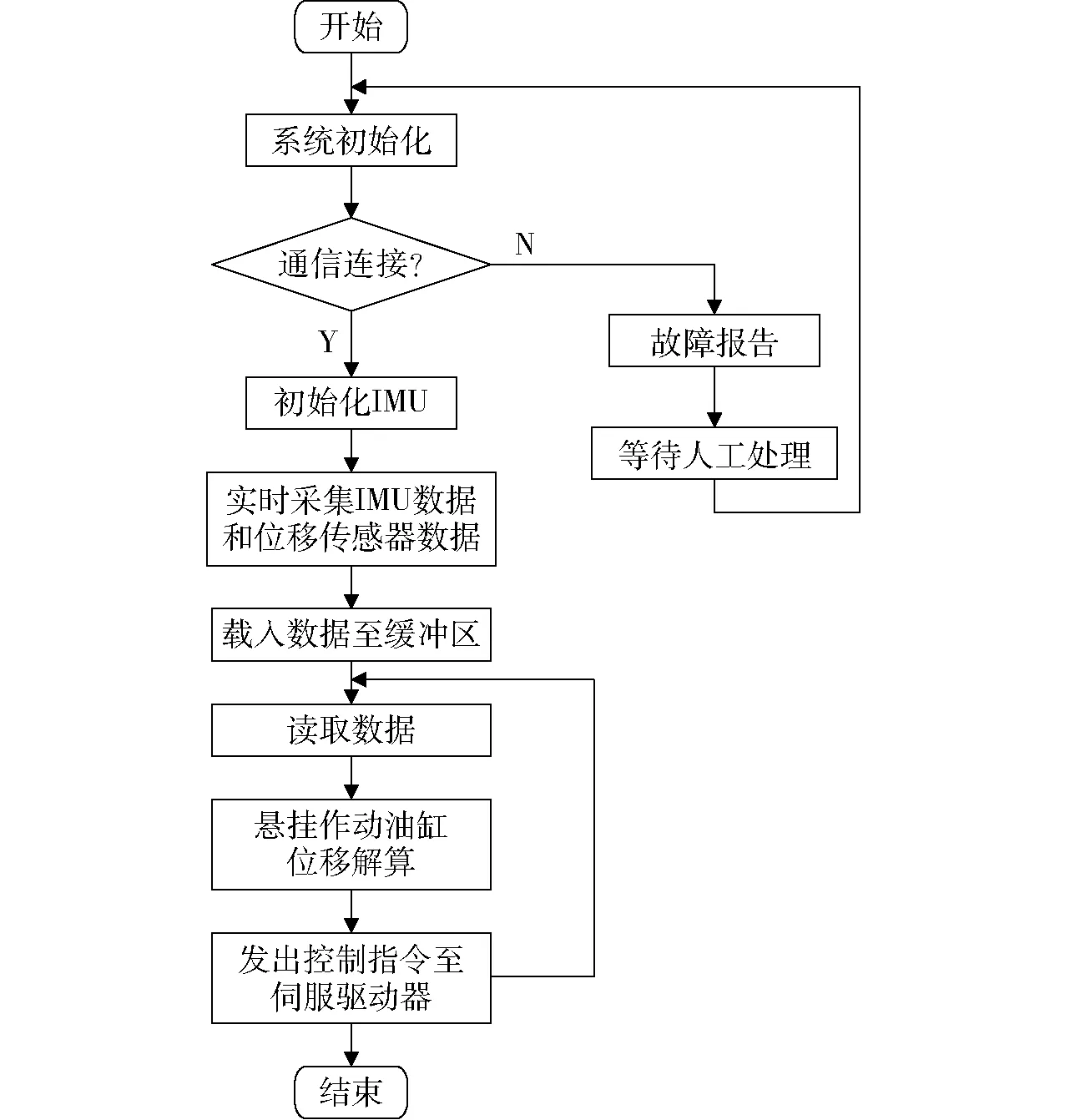
图9 程序流程图Fig.9 Flowchart of program
3 试验
3.1 试验设备与器材
为验证本文设计的基于主动悬挂的车载稳定平台调平系统的可行性,试制了车载稳定平台样机,如图10所示。试验所需器材还包括自制高台(图11)和单边桥(图12)。高台高h1=0.21 m;单边桥长l=9 m,高h2=0.1 m。试验地点为河北省特种运载装备重点实验室,试验场地为水泥路面,路面基本水平,试验时间为2019年1月12日至4月14日。
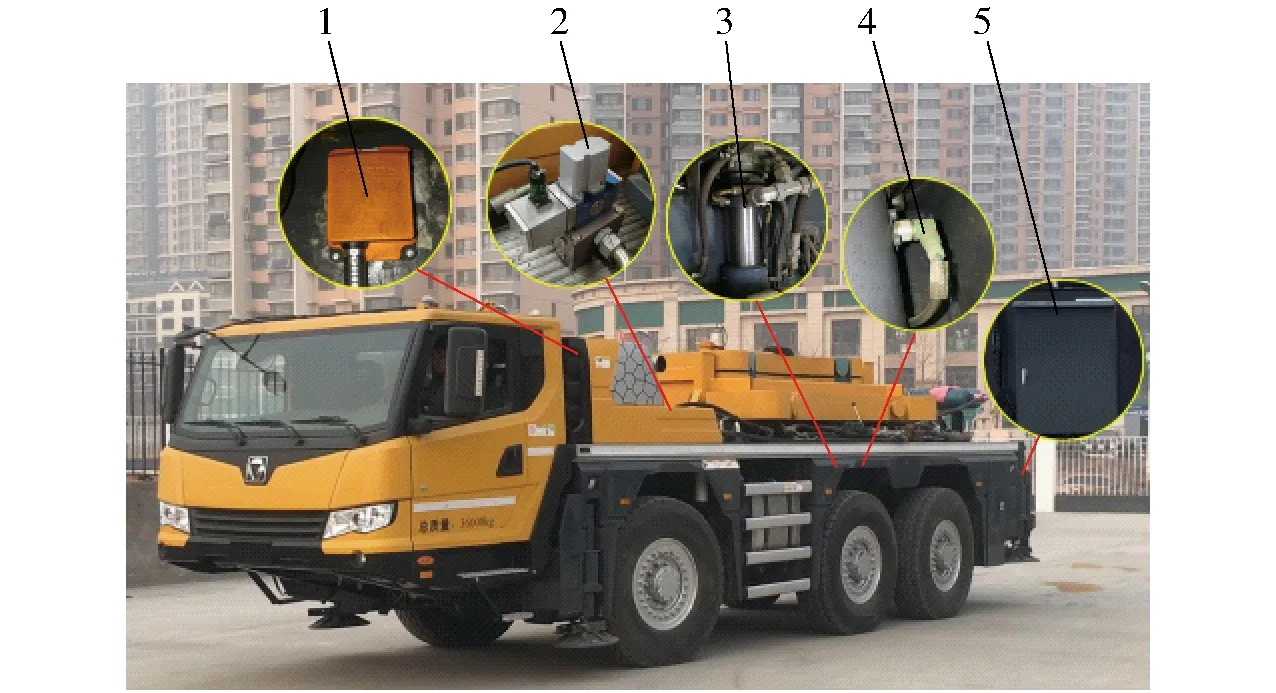
图10 试验样机Fig.10 Experiment prototype1.IMU 2.三位四通电液伺服阀 3.悬挂作动油缸 4.位移传感器 5.电控柜
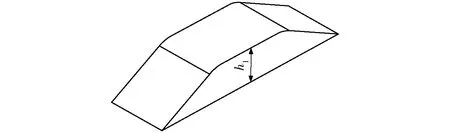
图11 高台Fig.11 High platform
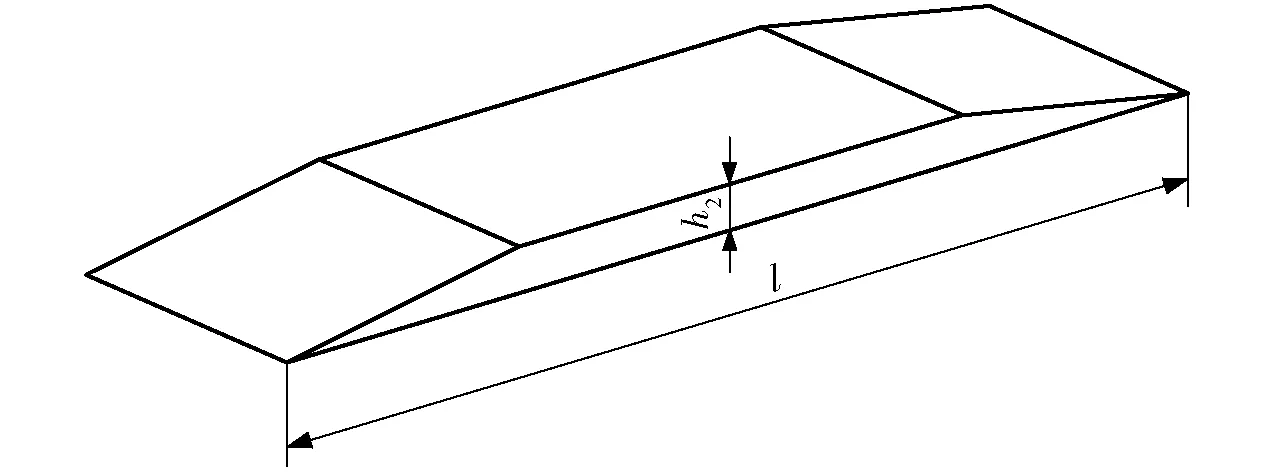
图12 单边桥Fig.12 Unilateral bridge
3.2 试验内容
试验分为驻车调平和行车调平两组试验。
3.2.1驻车调平试验
采用本文设计的基于主动悬挂的调平系统(简称主动悬挂调平)和样车自带的刚性支腿调平装置(简称刚性支腿调平)进行驻车调平对比试验,试验现场如图13所示。主动悬挂调平,在主动悬挂调平程序关闭状态下开动样车,使其前轴左右两轮分别置于左右两高台之上,驻车静止,随后启动调平控制程序。刚性支腿调平,样车自带的刚性支腿调平方式为人工手动调平。试验时,开动样车,使其前轴左右两轮分别置于左右两高台之上,驻车静止,然后通过观察水平仪的状态操作相应按钮对各支腿进行调节,直至车载稳定平台水平。

图13 驻车调平试验现场Fig.13 Parking leveling experiment site
3.2.2行车调平试验
行车调平试验采用过单边桥调平和过双边桥调平两组试验方案。两组试验方案中均选择1挡(约2.3 km/h)车速行驶。
过单边桥试验方案:启动主动悬挂调平控制程序,开动样车,只让一侧车轮通过单边桥,另一侧车轮依旧行驶在水泥路面上,记录平台侧倾角变化情况。关闭主动悬挂调平控制程序,以同样的速度和方式通过单边桥,记录平台侧倾角变化情况。过单边桥调平试验方案主要用于测定平台样机通过单边桥时车身侧倾角的变化情况,试验场景如图14a所示。
过双边桥试验方案:根据轮距对称放置两套单边桥组成双边桥,启动主动悬挂调平控制程序后,开动样车通过双边桥,记录平台俯仰角变化情况。关闭主动悬挂调平控制程序,以同样的速度和方式通过双边桥,记录平台俯仰角变化情况。过双边桥调平试验方案主要用于测定平台样机通过双边桥时车身俯仰角的变化情况,试验场景如图14b所示。

图14 行车调平试验现场Fig.14 Driving leveling experiment site
3.3 试验结果与分析
驻车调平试验结果如图15所示。当样车前轴左右两轮分别置于左右两高台之上,驻车静止,此时车载稳定平台俯仰角约为2.5°,相当于将整车置于2.5°纵坡路面上。由图15a可知,在主动悬挂调平方式下,平台俯仰角由2.5°调至水平状态需约5.5 s,调平精度为0.1°,调平过程平稳;由图15b可知,在刚性支腿手动调平方式下,平台俯仰角由2.5°调至水平状态需约35 s,调平精度为0.3°,调平过程中平台俯仰角波动较大。相比刚性支腿调平装置,本文设计的基于主动悬挂的调平系统在调平速度和调平精度方面均具有明显优势。
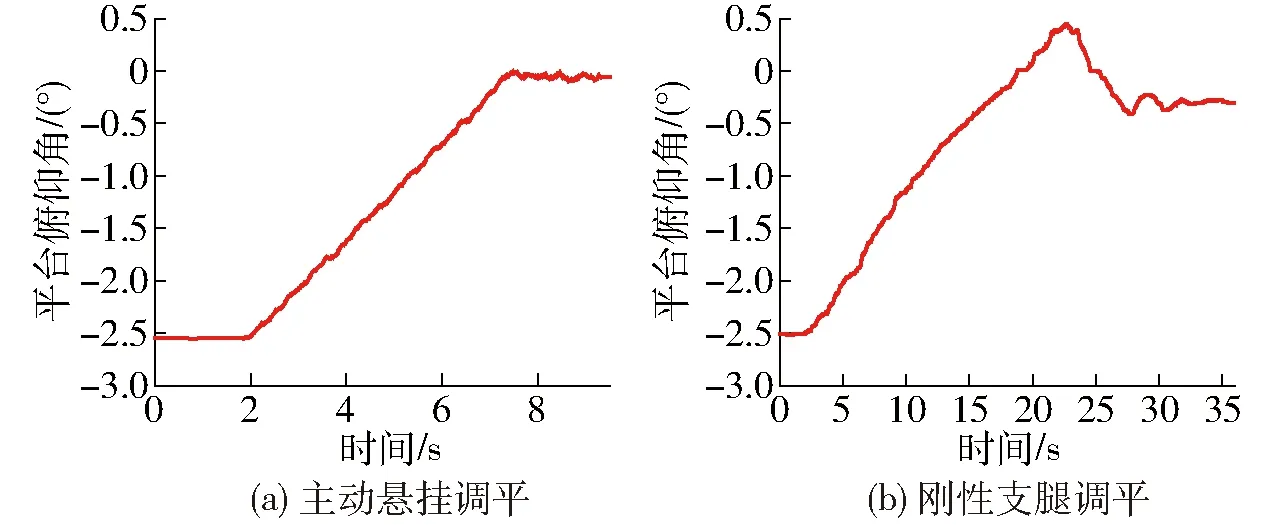
图15 驻车调平试验结果Fig.15 Results of parking leveling experiment
行车调平试验结果如图16所示。由图16a可知,在不启动主动悬挂调平控制程序时,样车由水泥路面至完全通过单边桥所产生的最大侧倾角为3°,而启动主动悬挂调平控制程序后,样车由水泥路面至完全通过单边桥,侧倾角最大误差为0.58°,平均绝对误差为0.19°,均方根误差为0.27°,平台可基本保持水平;由图16b可知,在不启动主动悬挂调平控制程序时,样车由水泥路面至完全通过双边桥产生的最大俯仰角为1.56°,而启动主动悬挂调平控制程序后,样车由水泥路面至完全通过双边桥,其俯仰角最大误差为0.55°,平均绝对误差为0.15°,均方根误差为0.2°,平台同样可基本保持水平。
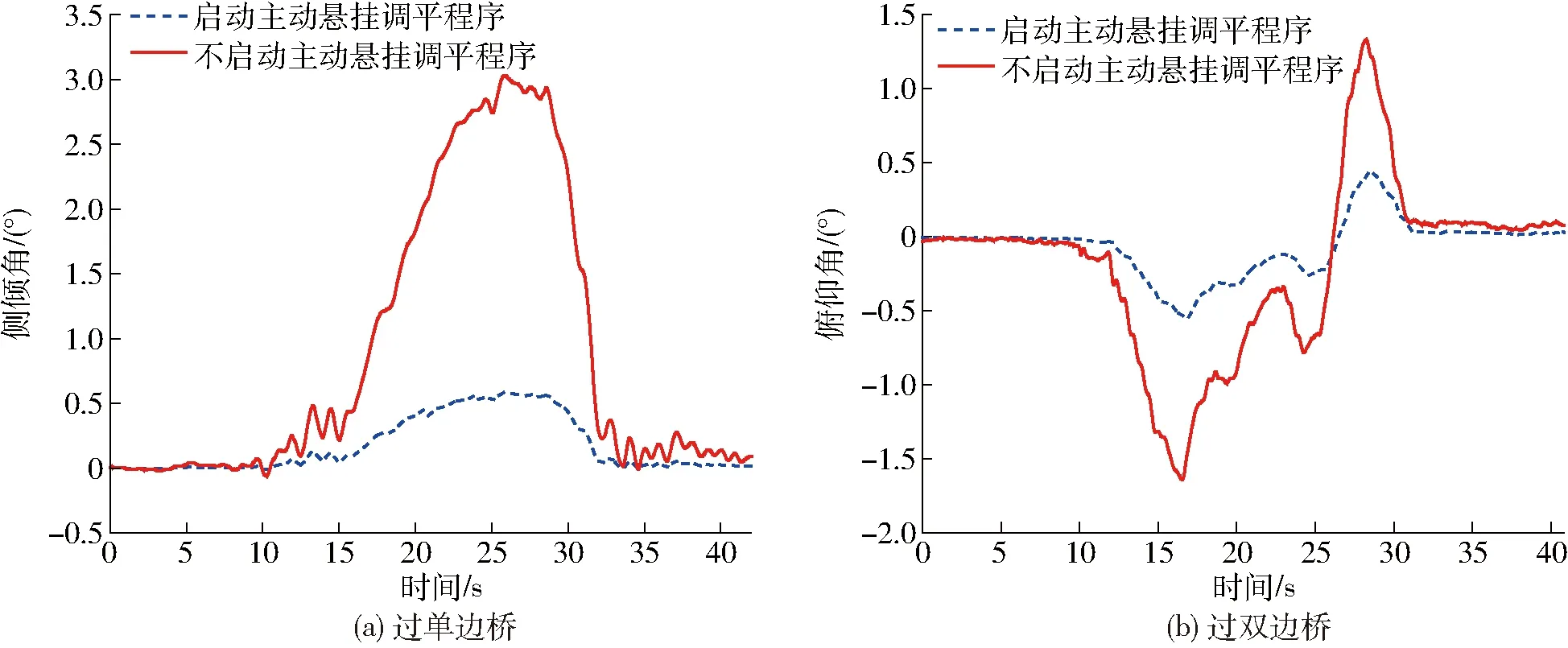
图16 行车调平试验结果Fig.16 Results of driving leveling experiment
驻车调平和行车调平试验结果表明,本文设计的基于主动悬挂的车载稳定平台调平系统无论在驻车或行车中均能使车载稳定平台保持较好的水平度。由文献[1-4]可知,轮式起重机、云梯消防车及混凝土搅拌机等工程机械设备对车载稳定平台的调平精度要求一般在0.5°以内,本文设计的调平系统驻车调平精度达0.1°,可完全满足上述设备的实际作业要求;行车调平时,最大调平误差在0.55°~0.58°范围内,可基本满足上述工程机械设备的实际作业使用要求。
4 结论
(1)在三轴六轮车辆底盘基础上,设计了一种基于主动悬挂的车载稳定平台调平系统。该系统通过悬架互联方式将平台六点支撑结构等效转换为三点支撑结构,采用“中心不动”调平算法对三支撑点高度进行调节,从而实现了对车载稳定平台的调平控制。
(2)在驻车调平试验中,采用本文设计的调平系统,平台俯仰角由2.5°调至水平状态约需5.5 s,调平精度为0.1°,调平过程平稳,可满足实际使用要求;在行车调平试验中,过单边桥调平时,平台侧倾角最大误差为0.58°,过双边桥调平时,平台俯仰角最大误差为0.55°,行车调平过程中平台侧倾角和俯仰角变化误差均较小,可基本满足实际使用要求。
猜你喜欢
大学数学(2022年6期)2023-01-14 07:16:34
汽车实用技术(2022年10期)2022-06-09 11:33:30
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
森林工程(2018年4期)2018-08-04 03:23:38
中国公路(2017年15期)2017-10-16 01:31:53
百姓生活(2017年6期)2017-06-10 16:05:27
航天工业管理(2017年4期)2017-05-12 01:16:35
幸福家庭(2016年10期)2016-11-25 08:19:40
西藏科技(2016年10期)2016-09-26 09:02:12
