面向智轨电车的激光雷达道路入侵物检测技术研究
2020-10-27 03:19:26刘斯斯胡云卿李晓光袁希文潘文波罗意平宇文天
控制与信息技术 2020年4期
龙 腾,刘斯斯,胡云卿,李晓光,袁希文,潘文波,罗意平,宇文天
(1. 中车株洲电力机车研究所有限公司,湖南 株洲 412001;2. 中南大学 交通运输工程学院,湖南 长沙 410075)
0 引言
在国家战略机遇下,新一代人工智能技术的崛起促使智能运载工具迅速发展,智轨电车正是在这种背景下发展起来的一种新型城市公共交通运载工具,其特点表现为胶轮无轨、与传统汽车共享路权、不沿固定钢轨运行、自动驾驶[1]。其车载环境感知系统用于快速、稳定地检测出道路入侵物,是实现电车自动驾驶的重要前提。
基于图像识别的道路入侵物检测技术发展比较成熟,但会受光线变化、物体遮挡、背景复杂等多种因素影响,精确性与鲁棒性不高,并且由于相机的覆盖范围有限,并不能全面反映智轨电车周围的环境信息。近年来,随着深度学习图像识别技术的发展,通过利用大数据集对模型进行训练,图像识别的精度和鲁棒性有一定的提升,但仍无法有效地确定道路入侵物的相对位置。基于激光雷达的道路入侵物检测技术采用多线激光雷达对智轨电车周界进行扫描以获取环境信息,通过点云数据处理,得到对象的距离、方向、高度、姿态角等信息,在可用的测距范围内,激光雷达具有厘米级测距精度[2-3]。
因智轨电车车身长、无轨道约束、运行环境复杂,采集到的点云数据复杂、紊乱,需采用对象分割算法对数据进行处理。网格图分割是最常用的方法之一,它将点云转换为夹点图并按属性评估每个网格上的数据。文献[4]提出了一种基于局部凸性概念的分割算法,并比较了法向量的属性。文献[5]提出了一种评估每个网格中垂直位移的算法,如果位移超过给定阈值,则将网格标记为已占用。文献[6]将数据映射到偏振网格图中,并使用非参数地面模型拟合地平面。除了网格图分割法,还有学者提出根据空间数据结构进行分割,如Kd-tree[7]和oc-trees[8]。文献[9]比较了迭代最近点的八叉树和Kd树的不同实现。文献[10]为映射应用程序提供了一个概率和内存有效的八叉树算法。文献[11-12]评估了半径邻域搜索的不同方法并得出结论,Kd 树是任意维度的最有效和灵活的空间数据结构。文献[13]采用Kd-tree 通过使用高程信息消除异常值后管理车载激光雷达数据。
近年来,许多研究学者开展了基于点云数据的目标检测的研究,包括美国加利福尼亚大学的Wen 和Tomizuka[14]等学者提出的动态车辆检测和高清晰度地图辅助的LiDAR 匹配(ULM)估计方法,与传统的基于Hessian 矩阵的ULM 估计方法相比,所提出的方法通过对周围动态车辆建模来估计ULM,然后使用匹配算法将ULM 结果与检测到的动态车辆收敛特征相关联。亚利桑那大学图森分校的学者建立特征提取和数据关联风险预测算法,假设提取的特征集与映射的地标级相匹配,通过结合基于卡尔曼滤波器的测试方法来检测不需要的对象[15]。
在基于点云数据的目标分类、跟踪的研究方面,文献[16]提出了一种基于激光雷达的自动驾驶汽车感知解决方案,其利用激光雷达传感器测量每个单点的位置和高度作为三维坐标来捕获和表示对象;然而,由于激光雷达扫描的方式特性使得这些点在计算机中以无组织结构的形式保存,因此需要采用与现有图像处理算法明显不同的特定数据组织和处理技术。文献[17]提出了一种使用3D 激光雷达的多目标跟踪鲁棒算法MTT(multitarget tracking robust algorithm),为补偿由形状变化或遮挡引起的非预期的变化而引入了基于目标几何信息的特征,以精确估计系统的状态。在文献[18]中提出了一种基于3D 激光雷达的实时交叉检测方法,其对于两种不同形状的交叉点的分类性能达到了80%以上,并且实时分类速率达到了5 Hz。这些方案的局限性在于对雷达传感器的精细性程度以及处理器的要求过高,大多数算法是基于64 线激光雷达的扫描数据才能够实现理想的效果;并且,为了保证点云数据处理的实时性,64线激光雷达扫描的点云数据量庞大,对数据处理器的要求很高,导致列车硬件设备成本大幅增加。
针对上述研究成果,本文提出一种基于双16 线激光雷达(VLP-16)的3D 点云的智轨电车道路入侵物检测算法。此算法在保证目标检测精准度的情况下,仅启用了数据量只有64 线激光雷达1/4 的16 线激光雷达,而且16 线激光雷达的成本大概只有64 线激光雷达的1/8。因为瞬时数据量的大幅度减少,对智轨电车感知传感模块的计算量要求也大幅度降低,这在保证数据处理时效性的同时也降低了硬件成本。本文将从多雷达点云数据的融合、点云去噪、入侵目标的识别和分类、实验验证几个方面来阐述基于多激光雷达的道路入侵物检测方法。
1 基于多激光雷达的道路入侵物检测流程
本文提出的道路入侵物检测技术分为5 个步骤:首先通过固定于智轨电车上的多个雷达进行扫描,采集运行环境的点云数据;接着,根据时间戳信息对多个点云数据进行坐标转换与融合,获取智轨电车完整的环境信息;之后,通过拟合算法对点云数据进行去噪处理,获得噪声低、背景简单的点云数据;再对点云数据解包、聚类;最后,采用道路入侵物支持向量机(support vector machine, SVM)分类器对输入的点云数据进行处理,获取道路入侵物的分类信息、位置信息及尺寸信息等(图1)。

图1 道路入侵物检测总体流程Fig. 1 Overall flowchart of the proposed method
2 多雷达的点云数据融合
智轨电车通过配备感知模块对多雷达点云数据进行处理,如图2所示。感知模块由中央处理器、交换机及多个16 线Velodyne 雷达组成,所有硬件均由千兆网线进行连接,并经预先配置将其设置在同一网段下,用来保证数据传输的稳定性与实时性。
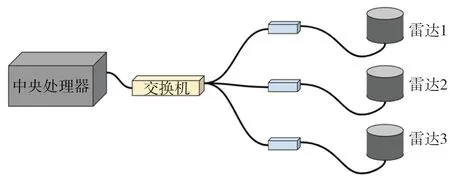
图2 感知模块结构Fig. 2 Structure of perception module
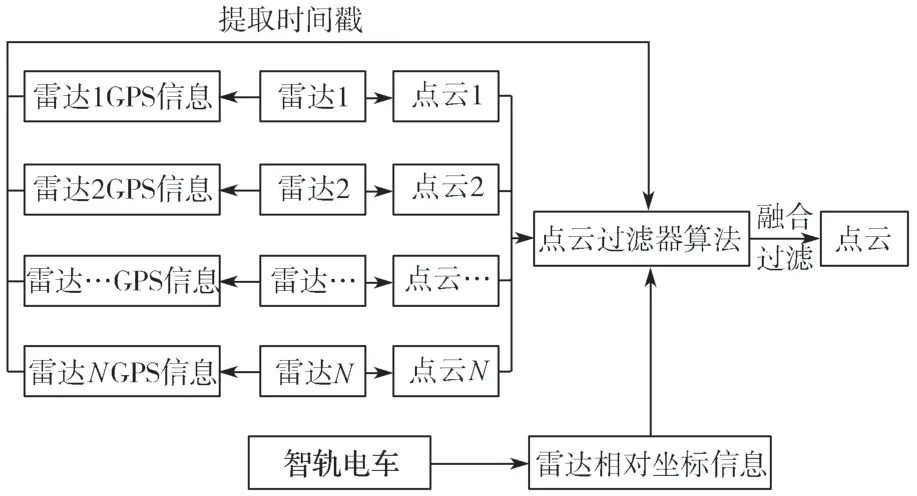
图3 数据融合流程图Fig. 3 Flowchart of data merging
点云数据的融合是点云数据预处理重要的一部分。雷达安装位置位于列车头部两侧,一般激光雷达的扫描范围为360°,采用单个雷达即可完成对运行环境的构建;但由于车体的遮挡,单个雷达的扫描范围存在局限,而多雷达的扫描又会导致扫描范围的重叠,如图4 所示。直接采用点云数据进行检测很难直接得到清晰的道路入侵物信息,并极有可能导致信息的误报、谎报。因此,本文采用坐标转换信息与雷达GPS 时间戳信息对多雷达点云数据进行转换、过滤及融合,从而得到完整的列车运行环境点云数据。
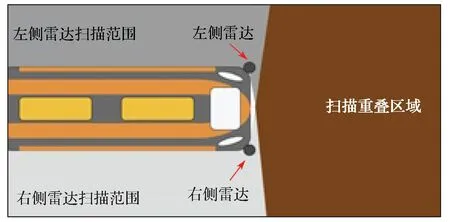
图4 车载雷达扫描范围Fig. 4 Scanning range of vehicle LiDARs before data merging
首先获取智轨电车的雷达安装高度、安装距离、安装欧拉角等物理数据,之后以各雷达中心为子坐标系、列车头部中心为父坐标系建立空间坐标系(图5),最后对雷达数据进行坐标转换。对两个雷达进行数据采集处理后,利用父坐标系的y 轴、z 轴与智轨列车的车头前侧、车头顶部垂直的特性,分别将子坐标系1 转换后的点云x 方向小于0、子坐标系2 转换后的点云x 方向大于0的数据进行过滤,获取无叠加的智轨电车运行环境的点云数据,坐标转换融合后雷达扫描范围如图6 所示。

图5 坐标转换Fig. 5 Transformation of coordinates
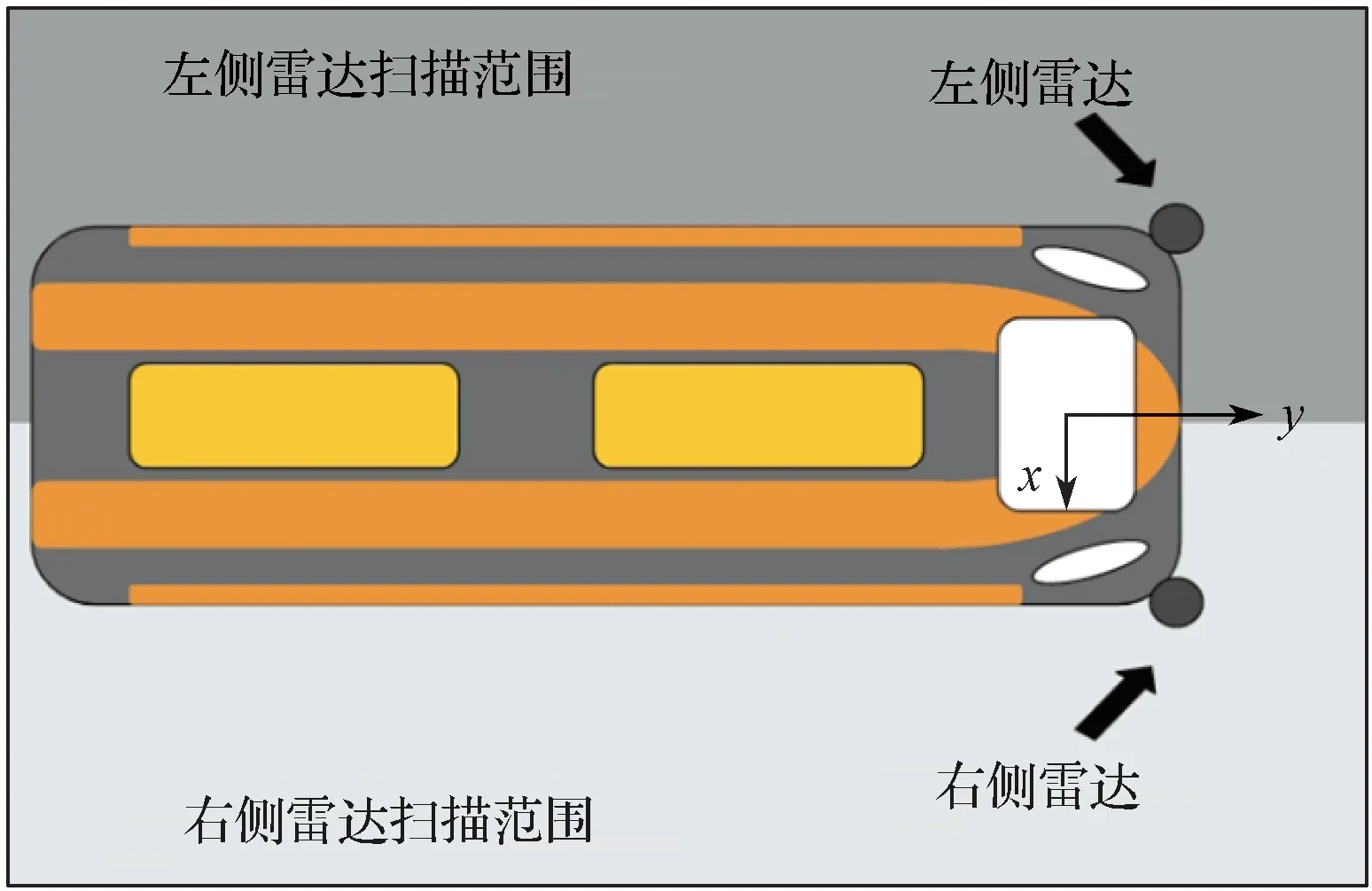
图6 融合后雷达扫描范围Fig. 6 Scanning range of vehicle LiDARs after data merging
对各雷达的信息进行接收,截取雷达每一帧点云数据相对应的时间戳,采用自适应时间过滤器对雷达间的时间进行精准匹配,并将融合后的点云数据传递到下阶段。融合后的点云如图7 所示。
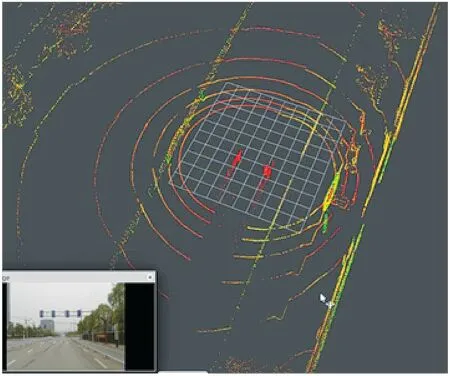
图7 融合后的点云数据Fig. 7 Illustration of merged data, collected by vehicle LiDARs
3 点云数据去噪
在确定获得无重叠且唯一的运行环境点云数据后,需要对输出点云数据进行去噪处理,淡化与道路入侵物连接的点云数据。由于在点云数据中地面数据与道路入侵物数据之间无明显界限,两者之间丰富的互动信息使得道路入侵物的正确识别更为困难,因此,需要滤除点云中的噪声。图8 示出点云数据去噪流程。
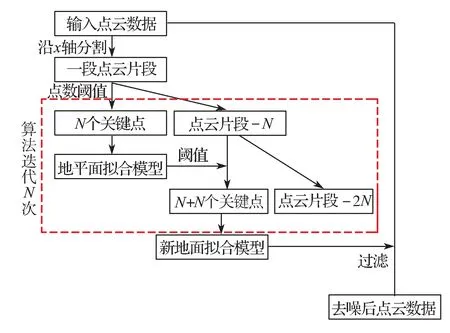
图8 点云数据去噪流程图Fig. 8 Flowchart of point cloud data denoising
采用Dimitris Zermas 提出的GPF(ground plane fitting)算法[19]通过控制阈值迭代关键点来对点云数据进行地面数据的去噪处理。首先将点云数据沿着x 轴方向等分为多段,并同时对多个分段数据进行处理,根据z 轴数据选取一定量的最低点作为关键点,采用加权线性回归(weighted linear regression, WLR)算法建立地平面模型;之后计算其余点到达模型的欧几里得距离,小于预设阈值的点将会加入地平面模型,对模型拟合更新,进行下一次的迭代;当到达一定量的迭代次数或者达到模型拟合所需的点数之后,迭代停止,此时已经得到一个具有高精度且能充分代表地平面的点云数据,并在原始数据中将其去除,获取低复杂度的环境点云数据。具体处理效果如图9 ~图11 所示。
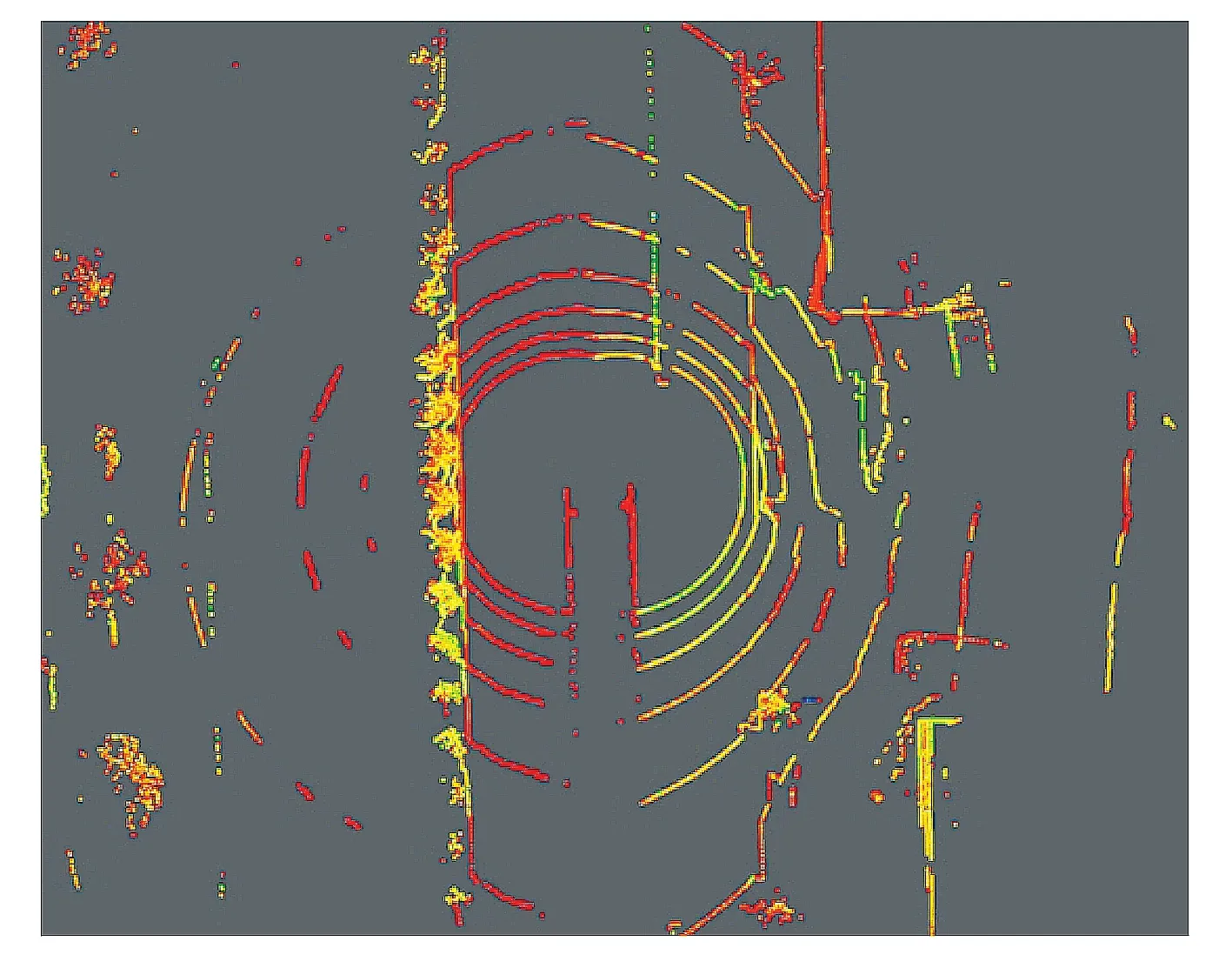
图9 原始数据Fig. 9 Raw data
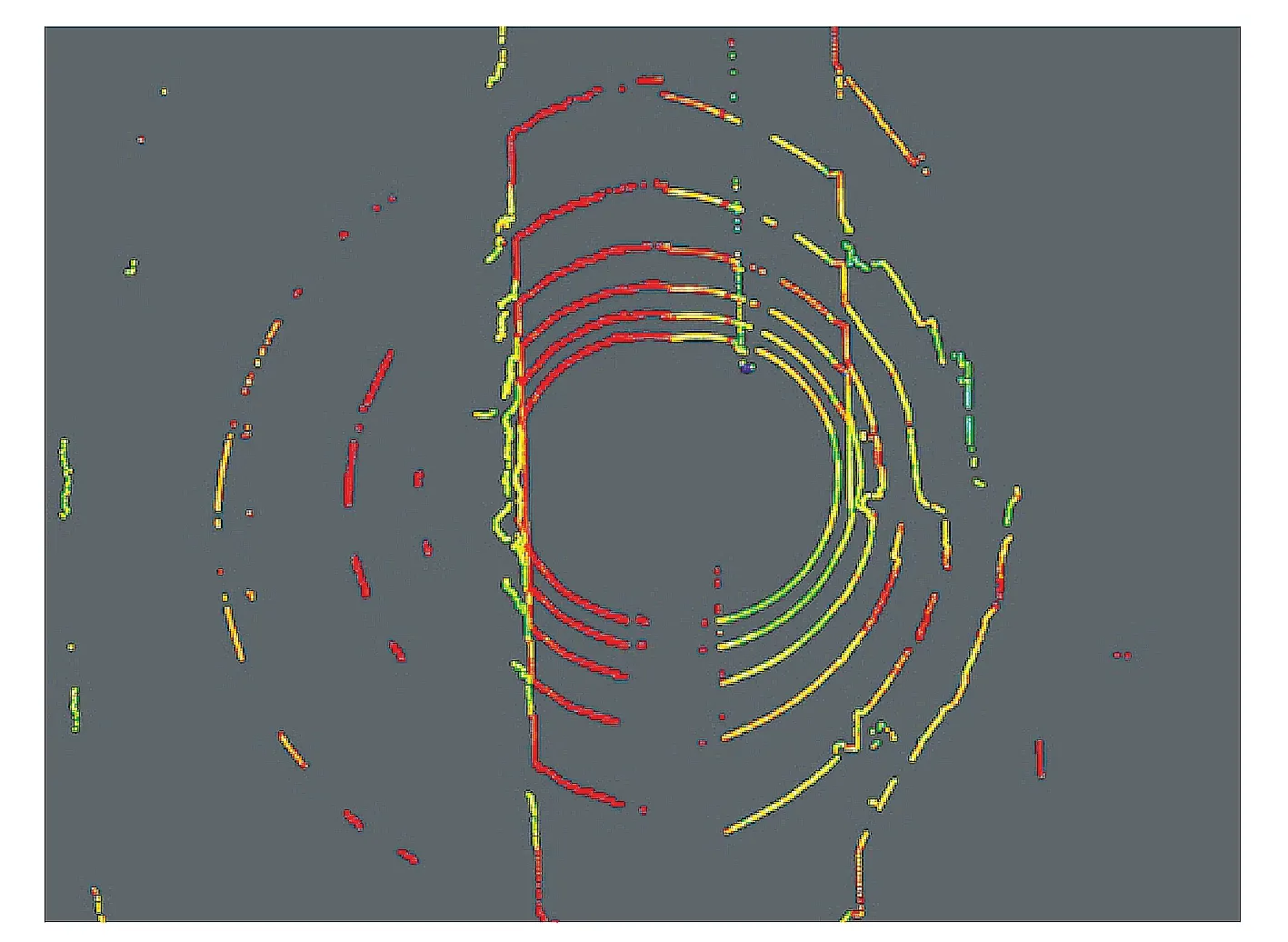
图10 拟合模型Fig. 10 Fitting simulation model
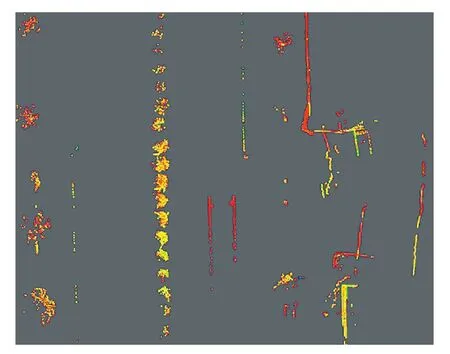
图11 去噪后数据Fig. 11 Denoised data
4 道路入侵物目标识别
低复杂度的点云数据包含智轨电车行驶环境的所有道路入侵物,因此需要对点云数据进行识别框选处理,以使道路入侵物分类的输入为单个障碍物数据。由于部分障碍物过于接近,相互之间会产生数据交融,因此,准确、稳定、误差小的道路入侵物识别将更好地为分类处理提供数据基础。图12 为道路入侵物识别流程图。
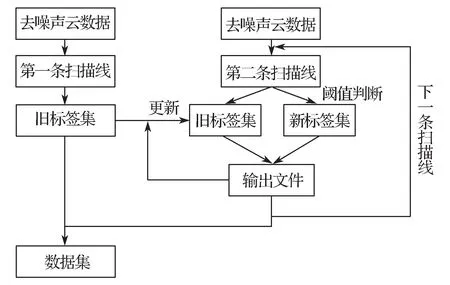
图12 道路入侵物识别流程图Fig. 12 Road intruder identification flowchart
在道路入侵物识别处理上,由于16 线雷达的数据量比较少,所以在处理时间加快的同时伴随着识别难度的提高。为保证运行快速与精准,采用Dimitris Zermas提出的SLR(scan line run)算法,通过标签从上到下扫描线的点云数据实现道路入侵物的识别。对从顶部扫描线所返回的点云数据进行处理,这部分点云数据首先获得自己的标签;之后由已标签化的点对下一层的点云数据进行评估,利用寻找最近邻的方法使旧标签只对周围点感兴趣,利用双层阈值解决新的点云数据是否属于旧标签及属于具体哪一个旧标签的问题。利用该方法,可以达到高效、高精度的道路入侵物识别,获取了道路入侵物的具体位置及点云数据等信息,由此可进行最后一步道路入侵物分类。
5 道路入侵物分类
在获取目标识别信息后,候选目标仍然是特征不明显的,因此,需要对已识别出的障碍物信息进行特征提取,为道路入侵物分类输入数据。
采用SVM 作为区分有效目标与无效目标的分类器,对道路入侵物进行特征向量提取后,将其直接输入到(m+1)个SVM 分类器,用于识别m 个入侵物种类与其他入侵物。具体步骤如下:第一,人工提取训练集对象的最大反射强度、最小反射强度、平均反射强度、反射强度方差、高度方差、距离方差、球度、直线性、平面性、体积、三维点总点数、发射器数量和中心坐标点等15 个特征向量,即将训练对象映射到高维度的特征空间;第二,将1×15 个特征向量与相应标签输入到权值为15×(m+1)的SVM 网络中,SVM 网络经过训练,将训练集中的正负样本采用一个高维平面进行分割,达到设定的训练次数或者训练精度后,生成权值适宜的模型;第三,将测试集中的对象输入网络以获取其特征向量,将其与模型中的权值相乘后直接输出道路入侵物的种类(智轨电车行驶环境中主要的道路入侵物对象为人和车)。图13 示出道路入侵物对象为人的分类处理效果;为更清楚地展示所识别出的物体,其顶部标记出了各自的编号。图14 为部分道路入侵物的信息返回值,包含道路入侵物的编号、长、宽、高,及其中心点x 值、y 值、z 值。
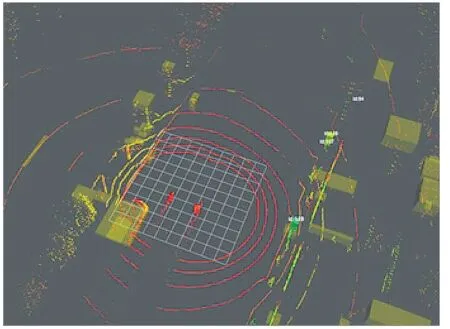
图13 道路入侵物分类效果图Fig. 13 Road intruder identification effect
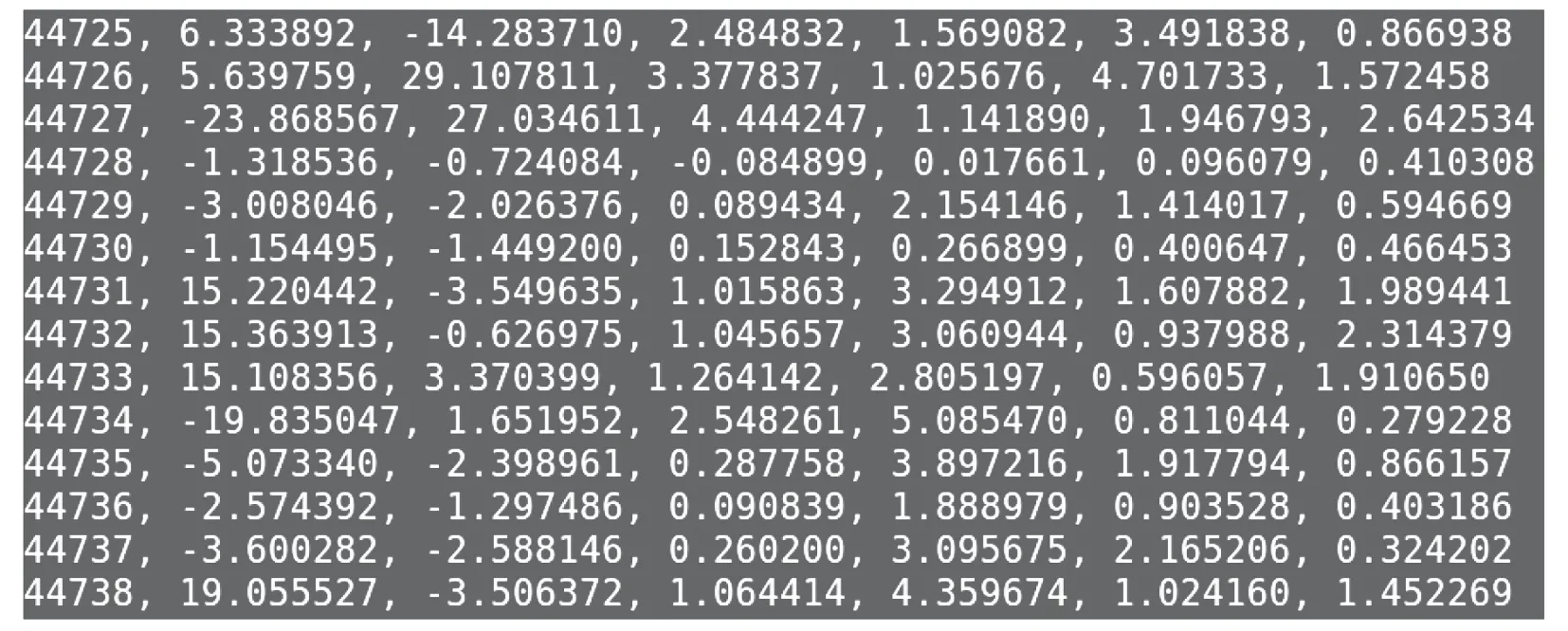
图14 道路入侵物的信息Fig. 14 Road intruder information
6 实验验证
本方法在配有单个NVIDIA 1080 型图像处理器(graphic processing unit, GPU)的电脑上进行数据验证,实验数据由智轨电车利用两个Velodyne 16 线激光雷达在国家智能网联汽车测试区(长沙)实际运行环境信息中采集提供。SVM 分类器被应用于NVIDIA 1080 GPU处理器上以实现道路入侵物分类,其测试集数据为晴天采集的,雷达数据输入频率为10 帧/s,车辆运行速度为20 km/h;能够在测试集上正确框选并且标记出来的,则认为其能被正确识别。
图15 为实际运行环境中检测目标为人和车时检测效果图。可以看出,在激光雷达采集点云数据稀疏的情况下,当点云对象激光线束多于4 条时,可以稳定并精确地识别分类道路入侵物,并以不同颜色的标定框框选,且在其顶部进行标签标记。
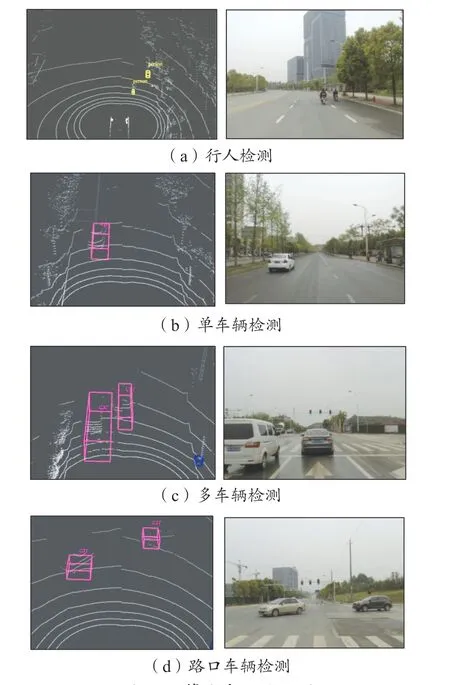
图15 算法实现验证图Fig. 15 Verification of the algorithm results
7 结语
本文提出了一种使用多个激光雷达混合数据并结合SVM 分类器对道路入侵物进行识别与分类的方法。该方法在保证高精度、高鲁棒性的前提下,解决了单雷达的盲区问题,并且高效地实现了目标的识别和分类。在进行道路入侵物识别分类的研究中,我们将进一步尝试将该方法应用于其他方面,例如人流监控、安全预警等,并在保证检测效果的前提下,尽可能地降低硬件成本,使该方法能广泛应用于市场。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
装备制造技术(2021年4期)2021-08-05 07:39:16
控制与信息技术(2021年2期)2021-07-23 01:10:36
电子世界(2021年3期)2021-03-19 01:17:54
公民与法治(2020年22期)2020-12-14 07:57:02
中国交通信息化(2019年1期)2019-03-26 06:43:46
科教新报(2018年20期)2018-10-21 21:43:47
电子制作(2018年16期)2018-09-26 03:27:00
财经天下周刊(2018年9期)2018-05-23 08:34:14