基于对等网络的电动汽车充放电控制方法
2020-10-26 09:40:14白英楠姜志新罗晓乐车宝林
通信电源技术 2020年13期
白英楠,姜志新,罗晓乐,车宝林
(国网吉林省电力有限公司松原供电公司,吉林 松原 138000)
0 引 言
发展电动汽车作为解决能源短缺和全球气候问题的有效途径受到了全世界的关注。我国政府高度重视电动汽车产业的发展,预计到2030年电动汽车充电总功率将占装机容量的25%[1]。但是,电动汽车的接入会给电网安全带来沉重的负担。研究电动汽车有序充电放调度策略,减小对电网的影响,具有重要意义。文献[2]以供电侧填谷和用户成本最小为目标,采用动态插值算法协调控制区域电动汽车,实现了电动汽车的有序充电。文献[3]基于分时电价引导电动汽车有序充电。文献[4]考虑网损的约束,提出了局部电网结构充电和全局电网充电的方法。
V2V(Vehicle to Vehicle)技术利用电池储存电量可对其他电动汽车充电,实现了电动汽车的相互充电,也能改善电网运行的可靠性。与V2G技术不同的是,V2V技术通过电动汽车之间的相互供电,可在电网的负荷高峰期直接减少充电负荷,使电网稳定运行,调节方式更加直接和有效。
本文提出基于对等网络的电动汽车充放电控制方法,以电动汽车为单位设计节点的通信、运算及实时决策,以对等计算(Peer-to-Peer Computing)技术为基础,建立了电动汽车充放电的对等网络架构。考虑到电动汽车用户最大利益,结合电网运行指标,在电动汽车状态约束条件下采用粒子算法进行求解,并通过算例分析验证了模型的有效性。
1 电动汽车有序充放电对等网络框架
电动汽车有序充放电对等网络框架将能源互联网划分为平台层、业务层和应用层3个逻辑业务领域,如图1所示。广泛分布式电动汽车集群主要在应用层业务范畴。基于能源互联网的广泛分布式电动汽车对等协调控制策略的实施如下:位于应用层的广泛分布式电动汽车1集群,其车载智能EV矩阵控制系统2作为整个系统对等协调控制的节点抽象信息和控制载体,实现任意一点与其他一点或者多点能够直接发起和结束充放电需求,而不需要供电侧的干预和介入;当系统内应用层的需求发生极端情况,知识区域内所有的应用层需求互相之间不能满足时,区域主动式EV矩阵能源分配与监测系统4介入进行协调与分配,进而可以通过配电自动化子站5向更高的配电自动化主站7申请协调控制;配电自动化主站7一方面直接进行协调与分配,另一方面在必要时可以向更高的配电调度自动化系统。

图1 电动汽车有序充放电对等网络框架
传统电动汽车的信息流动方向为单工模式,即从单个电动汽车节点到供电侧再到调度侧,然后从调度侧到供电侧再到单个电动汽车节点,各节点之间以及各节点到供电侧之间的需求信息是互相隔离和封闭的。本策略能够实现广泛分布式电动汽车集群任意两点和多点之间的通信,构建符合电动汽车使用特性的数据模型、与其对应的通信和控制模式以及各级控制系统。各节点基于双向和多向信息进行智能化决策,不但能够获取供电侧的相应信息,更能获取其他节点的状态信息。
信息共享方式的改变,使得广泛分布式电动汽车集群内任意一点能够直接发起或者响应充放电需求,进而实现用户需求驱动,并实现基于能源互联网的即插即用、开放互联以及自由对等特性,同时实现用户之间直接进行需求交换,即实现用户需求的透明化、信息传递的扁平化以及系统控制与响应的分布化。
传统控制方式中,所有的调度、分配、控制都是基于电动汽车发生需求后,或者使用特定的数学方法预测或者预估电动汽车的需求,只能被动获取电动汽车节点信息,因而控制方式可定义为被动响应式。本策略可以变电动汽车控制方式被动为主动,由电动汽车节点自身实现需求匹配和通信控制,主动进行状态信息的更新和互通。在这个过程中,区域控制中心充当保护、监督和调配的角色。正常情况下,区域控制中心仅确保安全运行的监督。极端情况下,区域控制中心才介入进行管理和控制,以及申请上级系统的协调、支持与调配。
2 对等网络下电动汽车有序充放电的控制策略
2.1 目标函数
本文建立典型日负荷曲线下峰谷差最小、负荷波动最小的目标,因此优化目标为系统负荷水平的方差最小。其中,目标函数以各时段的充电负荷为控制变量,目标函数为:
式中:Pb,t表示常规负荷在t时刻的负荷大小,ub表示一天内,常规负荷的平均水平,表示第k辆电动汽车在时段t内的充电功率需求。
2.2 约束条件
电动汽车充电功率约束为:

电动汽车动力电池SOC约束为:

式中:SOC(l,k,t)表示电动汽车动力电池的实时荷电状态。SOCmin、SOCmax表示保证电动汽车动力电池寿命不受损坏的情况下动力电池的最大荷电量和最小荷电量。
电动汽车充电约束为:

3 算例分析
3.1 参数设定
随着电池技术的发展和政府对新能源汽车的大力支持,未来电动私家车的市场相当可观。以比亚迪集团的秦EV300电动私家车为例,它的最大续航里程可达到300 km。由于电动私家车的运行特性、充电方式等与用户行为密切相关,故可分为工作日和休息日进行考虑。从统计学角度来看,人出行多出现在工作单位、住宅和商场等娱乐场所。因此,分析私家车的行为特性,在各地点的停放时间在概率上将呈现一定的规律性。
电动私家车行驶的结束时间与人的行驶规律密切相关,与使用传统的油动力汽车还是电动私家车无密切关系。人们使用汽车多用于上下班、商场购物等,因此可参照传统燃油动力私家车数据。通过统计私家车行驶规律,私家车每天行程结束时间x近似满足正态分布,概率密度函数为:

式中:us是电动私家车行驶结束时间概率密度函数的期望值,取us=15.6;σs表示概率密度函数的标准差,取σs=3.4。
3.2 电动私家车每日行驶里程概率分布
去除偶然事件,电动私家车行驶里程相对固定,即家、工作地点以及商场之间的道路。美国统计局对电动私家车行驶里程做了大量统计,电动私家车电动汽车每日行驶里程近似满足对数正态分布[5-6]。对数正态分布的概率密度函数为:

式中:r表示单台电动私家车每日行驶里程;μD表示概率密度函数变量r的对数lnr的平均数,取μD=4.4;σD表示概率密度函数变量r的对数lnr的标准差,取σD=0.88。
2020年全国电动汽车推广运行超过500万辆,到2030年中国电动汽车总量将突破8 000万辆。工作日充电负荷曲线如图2所示。对比辽宁省电动汽车发展规划“在2020年辽宁省电动汽车推广使用应超过2万辆以上”,电动汽车数量设置在15 000辆。
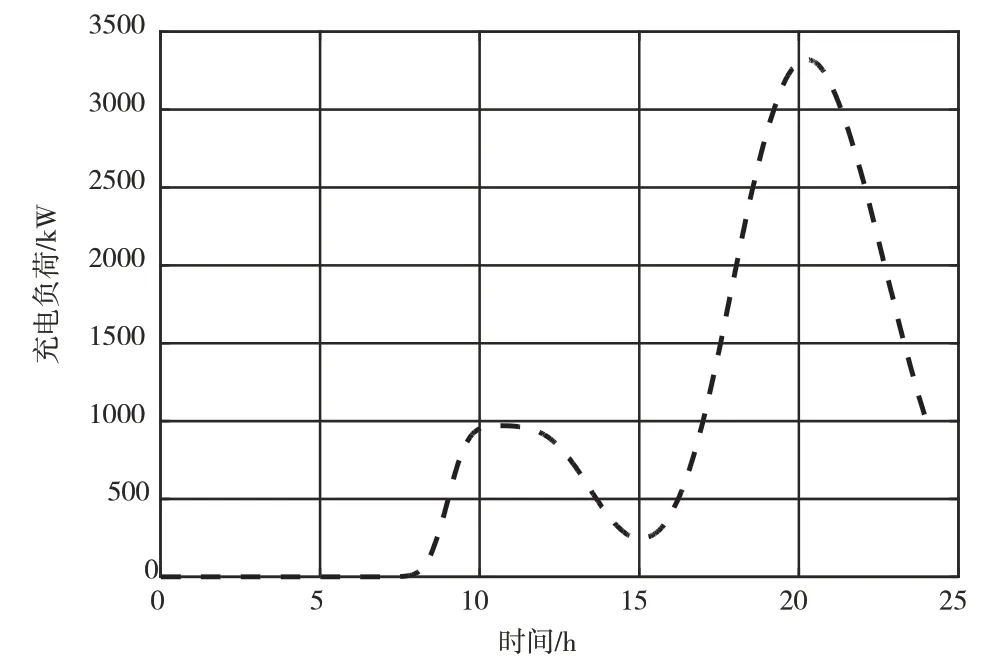
图2 2030年电动汽车工作日充电负荷曲线
本文选取松原市夏季典型日负荷为例优化电动汽车有序充电。松原市夏季典型日负荷曲线在夜晚22时刻负荷为20 129 kW,达到当日负荷峰值;在凌晨4时刻负荷为17 945 kW,为该日负荷上午最低谷。
3.3 模型求解及仿真结果分析
仿真算例以电动汽车有序充放电后日负荷峰谷差的平方最小为目标,以电动汽车充放电时间为控制变量,考虑电网与电动汽车充电本身的实际约束,采用传统粒子群算法求解仿真算例,仿真500次求平均值,最后结果如图3所示。

图3 有序调控充电负荷曲线
如图3所示,当电动汽车无序充电时,日负荷峰谷差为5 984 kW,有序充放电调控下峰谷差为2 935 kW。峰谷差减小了2 945 kW。
普通有序充电和采用对等网络的电动汽车充放电控制均能实现“削峰填谷”的效果,减轻电网运行的压力,使电网具有更高的可靠性。但是采用对等网络的电动汽车充放电控制通过电动汽车的放电转移部分充电负荷,使负荷峰值较普通有序充电模式更小,变压器有更大的安全运行裕度。
4 结 论
本文提出了对等网络下的电动汽车充放电控制方法,实现了移峰填谷,不仅能显著减少用户充电成本,而且有利于电网的经济安全运行。仿真结果显示,对等网络下电动汽车充电减少了电网的峰谷平衡,相比传统的有序充电电动汽车相应度更加灵活,充电控制更好。
猜你喜欢
红蜻蜓·中年级(2022年11期)2022-11-23 08:53:18
广西民族大学学报(自然科学版)(2022年1期)2022-05-18 05:18:06
湖南电力(2021年1期)2021-04-13 01:37:02
科技风(2019年1期)2019-10-14 01:36:13
文萃报·周五版(2018年36期)2018-07-13 05:18:40
当代旅游(2018年8期)2018-02-19 08:04:22
奥秘(2017年10期)2017-07-05 11:36:40
电源技术(2016年9期)2016-02-27 09:05:41
化工自动化及仪表(2014年2期)2014-08-02 01:43:26
现代电子技术(2014年4期)2014-03-05 18:18:26