
钢悬链线立管清管过程触底段位移变化规律试验研究
2020-10-24 02:00付云雷朱霄霄
海洋工程 2020年5期
付云雷,朱霄霄,陈 帅,刘 然
(1. 中国石油大学(北京) 机械与储运工程学院,北京 102249; 2. 中石油北京天然气管道有限公司,北京 100020 )
在浮式平台中,输油立管是海洋石油开发中的关键装备,钢悬链线立管(steel catenary riser,简称SCR)是一种用于水下生产系统与水面生产设施连接的输油立管,具有成本低、无需张力补偿等优点,因其较好的适应性而得到广泛应用[1-2]。常见的简单悬链线立管的形态如图1所示。钢悬链线立管随浮体的周期性升沉运动导致立管的触底区产生较为严重的疲劳破坏问题。在对深海立管的维护作业中,清管作业是一项最基本且最为重要的管道维护手段[3]。目前对于悬链线立管触底区的研究主要建立在模型试验和软件模拟的基础上。然而清管过程对立管触底区的力学响应与位移变化规律影响的研究则较为少见,亟待相关理论的指导和参考。
Bridge等[4-5]在深海环境钢立管工业联合开发计划 (STRIDE JIP) 中进行了全尺度的三维管—土相互作用试验,根据测试结果,得出了土体吸力、加载速度都会影响流体、立管和土体的相互作用的结论,并提出了土体沉降的机理。Hodder等[6]在水槽中对管—土相互作用进行了试验研究,模型管采用低刚度大直径 PVC管,在顶端施加位移,考察触底区弯矩随顶端位移的变化规律以及循环加载时管道的整体变形。Clukey等[7]对土体响应及刚度进行了实验室测量,研究了循环加载下土壤刚度的衰减。王懿等[8]建立了一套简便易行的管—土相互作用试验系统,提出了软黏土条件下新的骨干曲线和吸附力预测模型。Wang等[9]开展了室内大比尺模型试验,围绕二维管—土相互作用,研究触底区的埋置深度对管内应力的影响。白兴兰等[10-11]设计了一套三维管—土相互作用的试验装置,能够为深水钢悬链线立管触底区管—土相互作用的试验研究提供参考。李伟等[12]在波流水槽内开展了管—土相互作用试验,研究了在不同流速阻尼和海床刚度下模型管触底区的弯矩和加速度等响应。毛海英等[13]运用ABAQUS软件考虑海床土体竖向非线性、沟槽侧向作用力和沟槽回填土的影响,建立了SCR与海床土体的有限元模型,进行了立管整体动力响应分析。常爽等[14]基于动力分析程序CABLE3D通过算例分析了浮体垂荡运动幅值、海床土剪切强度及梯度对SCR触底点的动力响应和疲劳损失影响。李凯等[15]基于3种典型管—土作用类型,通过数值模拟研究触底区管道的竖向运动过程并用试验结果进行验证。上述模型试验均没有考虑到清管器在清管作业过程中对钢悬链线立管造成的影响,不能为清管作业下钢悬链线立管的力学响应与位移变化规律的研究提供理论支持和参考。
因此设计开发了一种用于钢悬链线立管清管过程分析的试验装置,以触底区的管道为研究对象,通过控制滑台的运动规律对浮动边界进行模拟,试验条件较容易满足。借助该试验装置研究了管道上若干测点的位移运动规律,并结合软件ABAQUS的仿真结果进行了比较分析。
1 试验装置及试验设计
1.1 试验装置
试验设计开发了一种用于模拟钢悬链线立管在浮动边界条件下清管行为的简易测试试验装置,如图2所示。
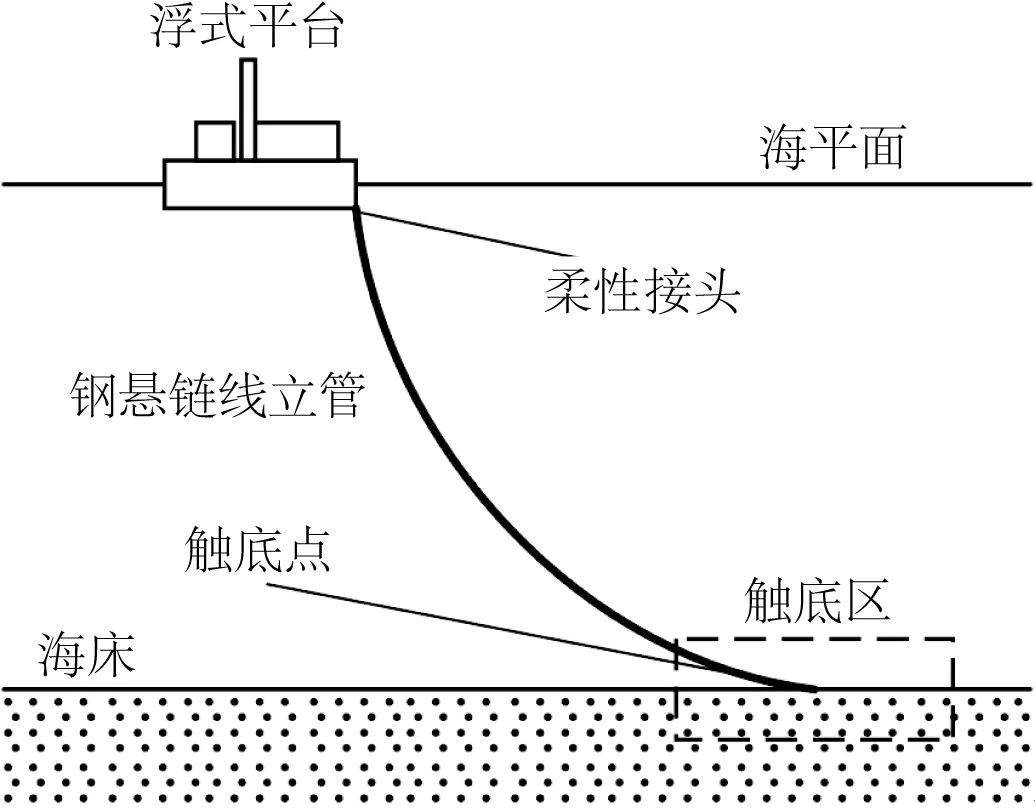
图1 钢悬链线立管结构示意Fig. 1 Schematic diagram of the steel catenary riser structure

图2 试验装置Fig. 2 Experimental facility
该试验装置主要包括4个部分,即二维加载装置、缩比模型管道、数据采集与控制系统、高速摄像机。借助该试验装置可进行无水试验。
二维加载装置包括水平和竖直两个方向上的伺服运动滑台,如图2所示。加载系统可以在滑台控制箱的可视化屏幕中分别设置有关两个方向的振幅与周期参数,以此用来加载试验中所需要的立管悬挂端的位移运动规律。模型管道与加载装置连接方式为铰接连接。在模型管道的顶部安装拉力传感器,用来记录顶部张力。立管底部与选定好的试验材料泡棉板相互接触,模拟立管与海床的接触作用。试验中准备的高速摄像机可以通过选择不同帧数来调整视频录制的清晰度,记录管道上测点的位移变化情况,如图3所示。

图3 高速摄像机测量管道位移装置Fig. 3 Pictures of the measurement of pipe displacement with high-speed camera
1.2 试验内容设计
以一条长度为1 200 m的钢悬链线立管为研究对象,研究水深为850 m。首先在软件ABAQUS中建立整个钢悬链线立管模型并进行仿真计算。在此基础上,试验选取位于触底段的980~1 200 m管道为对象,研究其在海洋载荷和浮式平台的升沉运动下的位移变化规律。参照已有几何、运动和动力相似原则[16],对试验管道进行严格的缩比计算,得到如表1所示的模型管道的主要物理参数,并且根据缩比计算中杨氏模量计算结果来确定试验中选择尼龙管模拟钢悬链线立管,管道外径8 mm,内径6 mm,杨氏模量为8.3 GPa,密度为1 600 kg/m3。
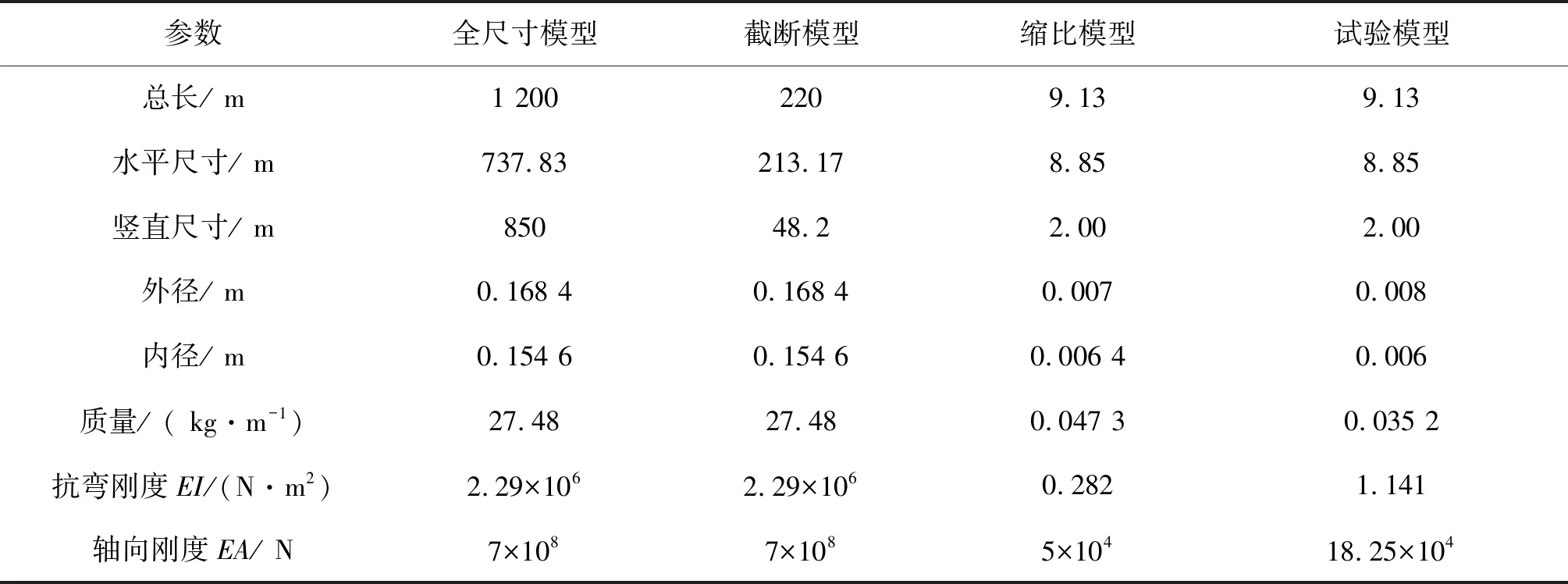
表1 试验管道物理参数Tab. 1 Experimental physical parameters of SCR
试验中选择的缩比尺λ为24.1。由于波浪、洋流和浮式平台的升沉运动主要影响钢悬链线立管的顶部和中部,对立管的触底区影响很小,因此开展无水试验。试验中所选择的立管在几何尺寸、质量、抗弯刚度、轴向刚度上都基本达到缩比模型的要求。对于管道触底区与管道相接触的海床的刚度,不需要进行缩比处理,试验所选泡棉板刚度经测试为200 kPa,与数值模拟中海床刚度一致。由于试验中模拟清管器的试验材料选取要受到其自身质量和管道尺寸等因素的限制,同时无法在直径如此小的管道中控制清管器的运行规律,因此综合以上考虑,试验中选择两个相同尺寸的空心半圆柱体不锈钢拼接在一起并黏接在试验管道外壁上用来模拟清管载荷。此外,立管中的清管器在进行清管作业时,其对立管的影响主要来源于清管器本身的重力载荷以及清管器对管道的冲击载荷。重力载荷施加方便,而对于冲击载荷的具体量,目前在相关领域的研究中仍不能用量化公式或理论进行确定,因此试验中将清管器对管道的冲击载荷等效的转化为清管器的附加重力载荷,将原本在管道中运动的清管载荷等效为在管道相应位置处静止的清管载荷。清管器配重的选型如表2所示。其中试验模型与原模型之间满足一定的缩比关系,即λ3。
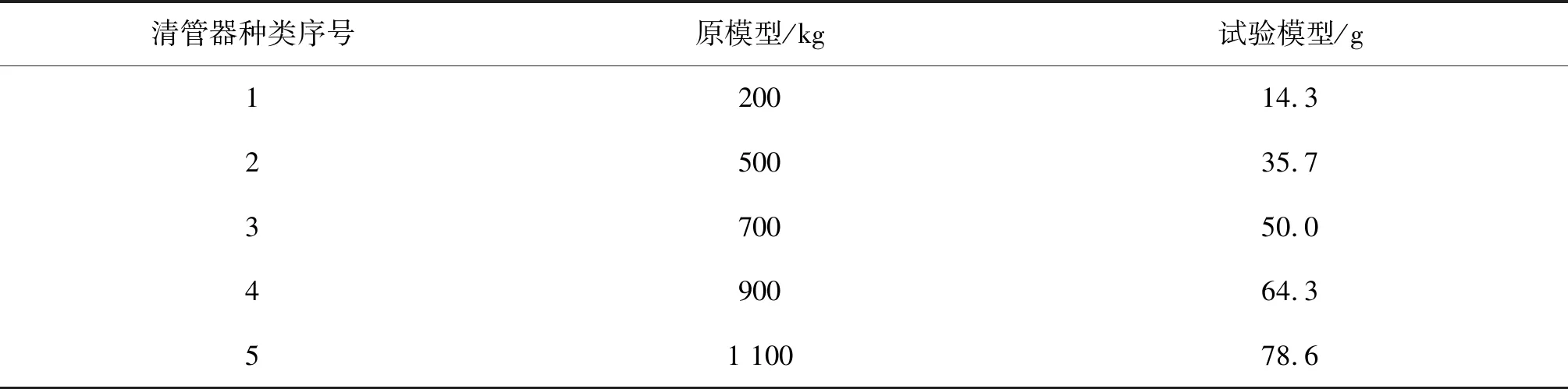
表2 试验中用到的清管器类型Tab. 2 Type of pigs used in the experiment
1.3 数据采集与处理
二维加载装置由滑台控制箱内的可编辑逻辑控制器(PLC)及驱动器进行控制。在控制模块中,二维加载装置可以实现独立控制,既能实现静态的独立控制,也能实现双轴正弦式动态控制。在数据采集模块中,通过高速摄像机配套的软件实现视频的采集与处理,如图4所示。试验中管道上的测点位置如图5所示。在软件中对高速摄像机拍摄得到的相应测点的位移运动视频进行处理,进而获取每个测点的位移随时间变化的数据。试验中每组视频的录制时间在16 s左右,约为滑台运动的10个周期。

图4 高速摄像机视频软件界面Fig. 4 High-speed camera video software interface

图5 试验管道位移测点示意Fig. 5 Schematic diagram of points for displacement measurement
2 试验数据分析
2.1 试验装置可靠性验证
为了验证试验模型的有效性,首先对拉力传感器采集到的拉力数据和高速摄像机采集到的管道测点的位移数据进行处理,然后将有限元软件中真实尺寸模型的仿真结果进行缩比后同试验结果进行比较,拉力数据对比结果如图6所示,测点1 040的位移数据对比结果如图7所示。从图中可以看出,试验数据与仿真数据在顶部拉力以及管道测点在X与Y两个方向的位移时程方面都表现出较好的吻合性。由此验证了模型试验装置的有效性和可靠性。

图6 传感器拉力测量结果与数值模拟结果比较Fig. 6 Comparison of measurement results with numerical simulation results for tension sensor
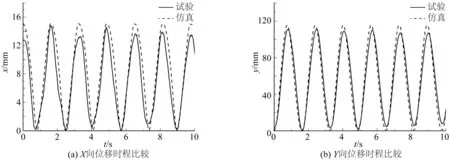
图7 测点1 040在两个方向上位移时程的比较Fig. 7 Comparison of displacement time history of the measuring point 1 040 in X and Y directions
2.2 同一测点施加不同清管器载荷时的位移变化规律
在验证了试验模型有效性的基础上,分别从以下方面研究清管载荷对立管触底段的位移变化的影响规律。
试验中选取管道上节点序号分别为1 040、1 080和1 120的3个测点,测量这3个测点在施加不同清管载荷的条件下X向与Y向的位移时程曲线,并选取试验结果中的一个完整周期(以被测点从初始位置运动至极限位置再运动回初始位置为一个周期,时间为1.63 s),分别如图8、图9所示。
图8表示不同清管载荷作用下,3个测点的X向位移在一个周期内的变化规律。从图中可以看出,随着清管器质量的增加,3个测点的X向位移均在小范围内波动,没有明显的变化规律。观察图9可以发现,对于3个测点来说,Y向位移随着清管器质量的增加基本上也没有出现变化。对比图8和图9可知,清管载荷的变化对于立管触底段的X向和Y向位移影响均不明显。

图8 清管载荷对管道不同测点的X向位移的影响Fig. 8 Influences of pigging load on displacement in X-direction of different measuring points of the riser
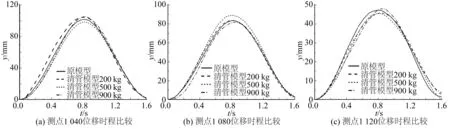
图9 清管载荷对管道不同测点的Y向位移的影响Fig. 9 Influences of pigging load on displacement in Y-direction of different measuring points of the riser
为了进一步研究清管载荷的大小对立管X向和Y向位移的影响,分别提取不同清管载荷作用下X向位移与Y向位移的极大值并进行线性拟合,结果如图10所示。由图10中拟合曲线走势可知,对于X向位移,测点1 040和测点1 120的位移极大值表现为一种随着清管器质量的增加而缓慢衰减的趋势,而测点1 080的位移则基本保持不变;对于Y向位移,仅测点1 040呈现小幅上升趋势,而测点1 080和测点1 120则基本保持不变。因此可得到如下结论:清管器载荷的变化对立管触底区3个测点在X向和Y向的位移几乎没有影响。
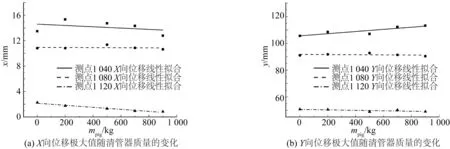
图10 管道不同测点处位移随清管器质量的变化Fig. 10 Variation of the displacement at different measuring points of the riser with the mass of pigs
2.3 不同测点施加同一清管器载荷时的位移变化规律
类似的,探究同一种清管器在通过管道不同测点时对该处位移的影响规律。对于管径为0.168 4 m的管道,适用的清管器质量的范围为50~100 kg,考虑清管器经过管道时产生的冲击载荷为清管器质量的2~10倍,选取500 kg清管器载荷进行研究,仍选取试验结果的一个完整周期进行分析,如图11所示。
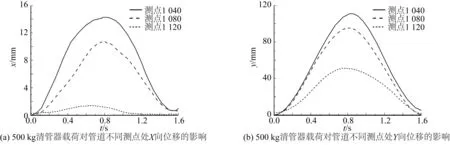
图11 同一清管载荷对管道不同测点位移变化的影响Fig. 11 Influences of the same pigging load on the displacement of different measuring points of the riser
图11表示在500 kg的清管器载荷情况下,清管器分别通过管道的3个测点时,3个测点在X向与Y向的位移变化规律。通过比较图中不同曲线可以发现,随着立管上测点所在位置所处水深的增加,X向和Y向位移均呈现出逐步减小的趋势。这说明在清管载荷下随着立管所处位置的海洋深度的增加,其X向和Y向的位移均会逐渐减小,并且可以观察到这3个等间距分布测点的位移极大值衰减并不相同,测点越靠后,位移极大值衰减的量越大。这是因为对钢悬链线立管两端施加了铰接的边界条件,在对立管的悬挂端施加水平和竖直方向的正弦规律运动时,由于钢悬链线的特殊几何形状,越靠近触底点,被测点所处位置的曲率越大,立管上间隔等距离的3个测点的位移极大值的差值就会随着测点靠近触底点而增大。为了较为直观地比较不同测点位移的极大值,提取图11中X向和Y向的位移极大值,如表3所示。

表3 500 kg清管载荷作用下各测点X向和Y向位移极大值Tab. 3 The maximum value of displacement of the measuring points X- and Y-direction under the 500 kg-pigging load
2.4 同一清管器经过测点1 040的前后过程中测点1 040的位移变化规律
为了研究清管器在通过某一段长度的管道过程中某一位置处的位移变化规律,试验中选择所研究的管道段为测点1 000~1 080,同时选择所要研究的测点为1 040。选择管道上施加清管器的位置依次为测点1 000、1 020、1 030、1 040、1 050、1 060和1 080共七个点并以500 kg清管器载荷为例。记录清管器在通过每个位置时测点1 040在X向与Y向的位移时程曲线。选取试验数据中各个周期位移变化的平均值,如图12所示。

图12 清管器通过测点1 040的过程中该处位移的变化规律Fig. 12 Variation of the displacement of measuring the point 1 040 during the pigging process
观察图12可以发现,在清管器逐渐接近测点1 040到逐渐远离测点1 040的过程中,其X向位移呈现出先增大后减小的趋势。其中,在清管器从测点1 000运动至测点1040的过程中,X向位移最多有4.94%的小幅上升,而在清管器从测点1 040运行至测点1 080的过程中,X向位移出现22.8%的显著衰减。对于Y向位移,在清管器未经过测点1 040时,Y向位移的变化范围均在1%以内。而当清管器通过测点1 040时,Y向位移相比于其他六点的平均值出现了4.35%的减小情况。在经过了重复性数据验证后,发现清管载荷在通过测点1 040的过程中,测点1 040处的X、Y向位移表现出的变化规律与图12表现出的变化规律始终相同,由此可以得出结论:在清管器通过立管某一位置的前后过程中,清管载荷会使得该处的X向位移变化产生先增大后减小的趋势。而对于该处的Y向位移的影响则表现为仅在清管器通过该处时Y向位移会有明显的减小。此外,相同情况下清管载荷对立管的X向位移的影响范围更大。
3 结 语
在钢悬链线立管清管模型试验中,借助高速摄像机采集立管触底段上若干测点的位移变化数据并从不同角度挖掘位移变化的规律,得到以下主要结论:
1) 相同条件下,对立管同一位置施加不同的清管载荷,清管器载荷的变化对立管触底区3个测点在X向和Y向的位移几乎没有影响;在对立管不同位置施加同一清管载荷时,随着立管所处位置的海洋深度的增加,其X向和Y向的位移均会逐渐减小。
2) 在清管器通过立管某一位置的前后过程中,清管载荷会使得该处的X向位移变化产生先增大后减小的趋势。对于该处的Y向位移的影响则表现为:仅在清管器通过该处时Y向位移会出现减小。此外,相同情况下清管载荷对立管的X向位移的影响范围更大。
3) 以高速摄像机作为测试手段,有效的观测到了钢悬链线立管缩比模型在运动过程中的位移,在未来进一步的研究中,如果对被观测模型使用双摄像头组成三维光学观测系统,则可以获得更高的观测精度。同时,由于篇幅限制,对于清管器对立管触底段的应力影响将在后续的文章中进行细致阐述。
猜你喜欢
中国化肥信息(2022年9期)2022-11-23
管道技术与设备(2022年4期)2022-08-17
中国应急管理科学(2022年2期)2022-05-23
石油工程建设(2020年5期)2020-10-27
天然气勘探与开发(2020年2期)2020-07-14
建材发展导向(2019年11期)2019-08-24
科教导刊·电子版(2018年6期)2018-06-06
证券市场红周刊(2018年25期)2018-05-14
证券市场红周刊(2018年40期)2018-05-14
舰船科学技术(2016年1期)2016-02-27
