
波浪作用下中上层浮鱼礁动力响应数值模型建立方法
2020-10-24 02:00施圣钤沈良朵桂福坤
海洋工程 2020年5期
潘 昀,刘 灿,杨 熙,施圣钤,沈良朵,桂福坤
(1. 浙江海洋大学 港航与交通运输工程学院,浙江 舟山 316022; 2. 浙江海洋大学 国家海洋设施养殖工程技术研究中心,浙江 舟山 316022)
南方海洋牧场环境因子不同于北方海域,并且主要以鱼、虾、蟹、头足类等高级消费者为增养殖对象,因此海洋牧场建设的模式应以浮式鱼礁、养殖筏式、养殖网箱等中上层人工生境构建为基础[1],增殖天然饵料、养殖藻场和创造鱼类保育场,为鱼类产卵和幼体庇护提供良好的栖息环境。农业部印发的《国家级海洋牧场示范区建设规划(2017—2025)》中提出:截止到2025年,规划在东海区共建设20个国家级海洋牧场示范区(包括2015—2016年已建情况),形成示范海域面积500多平方千米,其中建设人工鱼礁区面积160平方千米,投放人工鱼礁500多万空立方米。可见,国家高度重视和大力支持东海沿海地区海洋牧场建设,而如何选择浮鱼礁类型、确定投放布局、保证结构安全和材料安全、保证聚鱼和庇鱼效果是科学创造鱼类产卵场和保育场的重要前提。
日本是最早研究和使用中上层浮鱼礁的国家,指出浮鱼礁一般由浮力系统、礁体系统、锚泊系统三部分组成[2-3],日本和韩国近年来也设计和投放了用于近海的典型中上层浮鱼礁结构型式[4-5]。浮力系统构件主要为浮管和浮球组合而成,提供浮鱼礁的浮力同时也是波浪荷载的主要来源;礁体部分一般由刚性铁或者塑料框架覆盖网衣、塑料薄膜、帆布构成,网衣的透水性和柔性较大,且宜附着藻类生物为鱼群营造产卵场所和索饵区,更受青睐,也是荷载的来源;不同的锚泊方式对浮鱼礁的运动特性影响较大,需要搭配最佳的浮力和配重才能更好的发挥对浮体的系留作用,各系统之间及构件的协调、搭配非常关键。中上层浮鱼礁投放于近海,属于海岸工程范畴,因此,进一步开展中上层浮鱼礁结构安全、性能稳定、系统构成合理搭配的研究以及其抗浪机制的研究,对设计和投放人工浮鱼礁具有重要的意义。
近年来用于海洋渔业增殖的浮鱼礁也出现了新的结构型式[6],并进行少数单体投放和聚鱼效果评估,但针对海洋水动力学特性方面的安全和稳定性能以及浮鱼礁群布设方式等诸多工程基础问题和技术均少有报道和论文发表。浮鱼礁的浮力系统主要由浮球或浮管排列组合而成,鱼礁主体由纲绳和网衣编织而成,结构型式与养殖网箱非常类似。Hou等[7]、Huang等[8]、Bai等[9]、Zhao等[10]、Gui等[11]、Moe-Føre等[12]、Strans等[13]长期致力于网箱结构型式、网箱浮架运动、锚系方式、网箱容积变化的研究,才解决了网箱柔性结构在波浪和潮流作用下体积缩小及结构安全问题,确保网箱在不同海洋环境下满足设计要求。这些均为波浪作用下的浮鱼礁动力响应研究提供了保障,与网箱结构形式不同的是中上层浮鱼礁必须保持一定的高度和姿态才能作用于周围水体的鱼群[4],垂向尺寸往往比水平尺寸大5~10倍,并且中上层浮鱼礁多使用单锚系泊[4, 14-15](可群化投放)。数值建模方法与之不同的是复杂浮体结构转动惯量及转动变换布莱恩角的求算,以及中上层浮鱼礁各构成组件连接位置处点或单元的相互耦合受力和运动处理方法,这是研究的重点。
1 数值模型建立
中上层浮鱼礁各组成要素之间通过热熔和系缚方式进行连接,因此整体浮鱼礁的运动数值模型建立的关键就是连接位置处点或单元的处理。首先介绍圆管浮架、网衣、锚绳等组成要素单独波浪作用下受力和运动的数值计算,而后重点介绍三者之间相互耦合受力和运动的处理方法。
波浪作用下浮架、网衣及锚绳运动数值模拟方法分刚性和柔性两种情况,浮架为刚性结构,运动包括平动和转动,而网衣和锚绳为柔性结构,运动形式表现为拉伸和悬浮运动。数值模型主要采用莫里森方程计算划分单元和集中质量点的受力,进而获得整体结构的合力和绕质心的力矩,而后离散时间获得结构的运动状态和受力变化。
1.1 圆管浮架受力和运动
浮架采用HDPE管道热熔焊接,在小尺度范围内可认为管道为刚性,能够维持设计形状。由于波浪沿水深方向水质点速度和水质点加速度逐渐减小,因此以浮体的质心为中心,上部所受水平波浪力大于底部所受水平波浪力,这将导致浮鱼礁礁体发生转动。对浮架进行有限单元划分后再计算单元的波浪力,能够准确刻画这一现象。
1.1.1 浮架受力和单元划分
圆管浮架在波浪作用下的主要受力包括重力、浮力、波浪力以及网衣和锚绳的拉力。当圆管的直径与波长的比值小于0.2时,波浪力可使用莫里森方程计算。至于运动的圆柱杆件波浪力(包括拖曳力和惯性力)的计算以及水动力系数的选取在文献[16]中有较详细的介绍。当浮架发生转动后,波浪水质点速度方向、水质点加速度方向与圆管杆件之间的夹角发生变化,需要在圆管单元上建立局部坐标系,具体可参见文献[16]。
与文献[16]不同的是,此次建立的是三维浮架运动模型并且其周围缠绕网衣,如图1和图2所示。以浮架的正视面ABCD为例,为了保证网衣网目恰好完整地系缚在圆管上,水平方向AB和CD及AD和BC圆管的单元划分需要满足网目的尺寸大小。陈天华等[17-18]常采用水平缩结系数0.66(网目水平对角线长度与目脚长度2a=8 cm的比值)和垂直缩结系数0.75(网目垂直对角线长度与目脚长度2a=8 cm的比值)的网目形状。如果网目群化技术[17-18]采用8×8,那么网目的水平长度为0.422 4 m和垂直长度0.480 0 m。图1给出了框架浮体一个面的划分单元方式,网目系缚在圆管的奇数单元上,因此水平方向单元的长度为0.211 2 m,垂直方向单元的长度为0.240 0 m。图1中,每个方格表示一半单元长度的物理量(单元质量、波浪场位置处的水质点速度和水质点加速度、计算力臂的位置等)集中点。因此在三维模型中,除四个端点(A、B、C、D)处相邻三个单元结点,其余单元结点仅左右相邻两个其他单元结点。
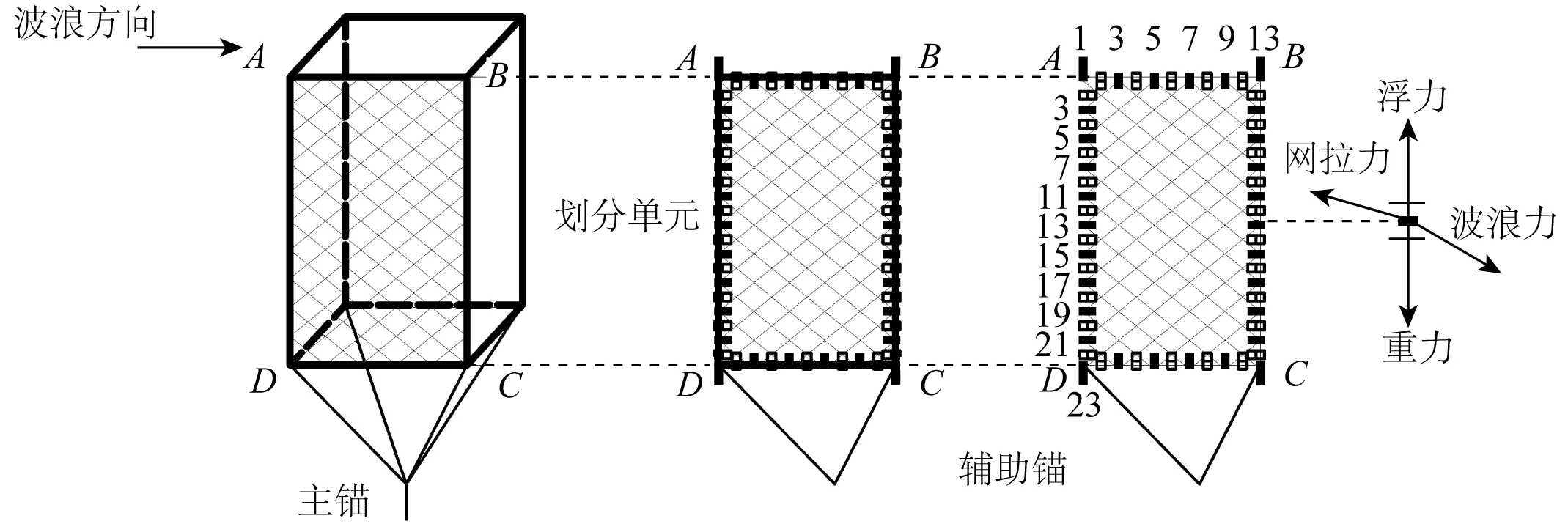
图1 浮架单元划分及其受力示意Fig. 1 Division and force analysis of the floating structure
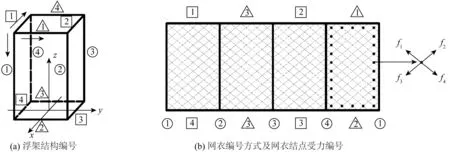
图2 浮架与网衣计算方法Fig. 2 Calculation method of the floating structure and netting
模型中,整体坐标原点建立在浮架的中轴线上,z=0与静水面重合,x、y和z轴的正方向如图2(a)所示。给定浮架的初始位置坐标分三种情况:一种是与z轴平行的图2(a)中圆形标号1~4号圆管,计算程序编写的数组编号方向为自上而下,如P1(ibar,4,3),其中ibar表示划分的ibar个单元点,4表示此类圆管的编号,3表示三维整体坐标x、y和z值;另一种是与x轴平行的图2(a)中方形标号1~4号圆管,数组编号的方向为自前而后,如P2(jbar,4,3),其中jbar表示把此类圆管划分成了jbar个单元点;第三种是与y轴平行的图2(a)中三角形标号1~4号圆管,数组编号的方向为自左而右,如P3(jbar,4,3),数字意义与前述一致。
1.1.2 浮架运动
浮鱼礁的浮架周围系缚缠绕网衣,在4根辅助锚和1根主锚的牵引下,浮架的运动包括平动和转动。根据刚体运动的速度和加速度合成原理,对于刚体在固定坐标系(绝对坐标系)中的运动速度和加速度实际上就是牵连速度和牵连加速度,包括平动和转动两部分。
1) 计算平动
先不考虑浮架转动,在整体坐标系下将浮架所有单元的受力进行累加,如图1主要包括波浪力、网拉力、浮力、重力,而后根据牛顿第二定律获得浮架的加速度,如式(1):

(1)
式中:M表示浮架的总质量,ΔM表示浮架各单元惯性质量和(某一单元的体积为Vvolume,取拖曳力系数为CM,则惯性质量为Δm=ρwater(CM-1)·Vvolume);aframe1表示框架浮体的平动加速度;T表示锚绳对框架的拉力;FD、FI分别表示浮架的合成拖曳力和惯性力;G表示浮架的重力;Ffloat表示浮架的浮力;Vframe表示浮架的平动速度,V0为框架浮体的初始速度或上一时刻的速度。
2) 浮架转动惯量公式推导
正确计算浮架的转动惯量,是计算其转动的前提。如图2(a)坐标系,相对于整体坐标系原点而言,以刚体的质心作为动坐标的原点可进行转动计算。根据平行轴定理,把浮架的12根圆管的转动惯量分x、y、z三个方向平移至质心处。如图2(a)所示,构成浮架圆管可分为三类,即圆形标号1、方形标号1、三角形标号1。假设圆管单位长度的质量为m,圆标号1划分为ibar个单元结点,每个单元的长度为Lvertical,方形标号1和三角形标号1均划分为jbar个单元,每个单元的长度为Llever,那么三类圆管的转动惯量平移至浮架质心处的计算表达式为式(2)~(3)。
圆形标号1圆管的x、y、z三方向转动惯量平移至质心处:

(2)
方形标号1圆管的x、y、z三方向转动惯量平移至质心处:

(3)
三角形标号1圆管的x、y、z三方向转动惯量平移至质心处:Ix3=Iy2,Iy3=Ix2,Iz3=Iy3。因此,浮架总的x、y、z三方向转动惯量为:Ix=4(Ix1+Ix2+Ix3),Iy=4(Iy1+Iy2+Iy3),Iz=4(Iz1+Iz2+Iz3)。式(2)和式(3)中的rbar为浮架所用圆管的半径,所有物理量均采用国际单位制计算。
3) 计算转动
刚体的转动是相对于整体坐标系原点而言,一般常取整体坐标系刚体的质心作为动坐标的原点进行转动计算。具体计算转动的方法和步骤如下:
(4)
式中:M为框架浮体的总力矩;F为第i单元上所受的合力;Ri为第i单元相对于质心转动的力臂。

(5)
式中:I为浮架的转动惯量,aframe2表示浮架绕质心转动的角加速度,wframe表示浮架绕质心转动的角速度,w0表示浮架的初始角速度或上一时刻角速度,θ表示Δt时间内浮架转动的角度。
根据布莱恩角计算公式[10-11, 16]可知,三维情况下Δt时间内框架浮体转动的角度与该时刻的布莱恩角相等。具体浮架的转动和平动的合成,即动坐标系和整体坐标系的转化公式如下:
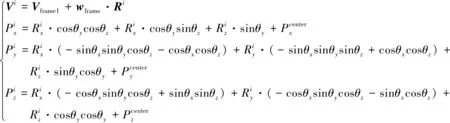
(6)
式中:Vi为浮架第i单元整体坐标系下的速度,由于每个单元Vframe和wframe均相等,所以无需使用i进行标记;P*i为浮架第i单元整体坐标系下的x、y、z坐标,依次为Pxi、Pyi、Pzi,P*center为浮架质心位置整体坐标系下该时刻的坐标;θx、θy、θz表示x、y、z轴的布莱恩角。
1.2 网衣受力和运动
假定网衣是由有限的无质量弹簧连接的集中质量点所构成,通过计算集中质量点在波浪和浮架、锚绳作用下的位移,得到网衣的受力和形状[16-18]。网衣的集中质量点设于每个网目目脚的两端,每个集中质量点包含网目的1个网结和2个目脚,如图2(b)所示,其中任意集中点4根网线的拉力沿顺时针方向依次命名为f1~f4。关于单独网衣的受力和运动可参见文献[17-18],其中给出了详细的网目群化技术、集中质量点法、网目局部坐标建立等介绍,此处不再赘述。
下面主要介绍网衣网目恰好完整地系缚在浮架周围上的处理方法以及系缚点位置网线拉力的计算方法。如图2(b)为浮架沿圆形标号1圆管展开后的结果,为了建模方便和使用一片网衣的思路,网衣的储存变量形式为Pnet(ibar,1+4(jbar-1),3),由于方形标号和三角形标号圆管连接端点有三处重复,所以网衣的列数应为1+4(jbar-1),ibar、4jbar的意义与上述一致。为了统一所有网目结点(质量集中点)均有相同数量拉力的网线,网衣系缚点并不集中质量,而是集中在如图2(b)实心圆点处,因此这些点中四角的端点集中了3.5倍的单根网线质量以及其他点集中了3倍的单根网线质量。与之对应,平行于x和y轴的圆管上的系缚点受到相邻网衣结点f1和f2的拉力,而平行于z轴的圆管上的系缚点受到相邻网衣结点f1和f3、f2和f4的拉力。依次根据系缚点(浮架划分单元点)的坐标和网目结点的坐标分解网线拉力即可求出系缚点受力的矢量和。
如图2(b),平行于x和y轴的圆管的单元点编号和数量(jbar)与网衣不同,式(7)给出了它们之间的转换关系,此关系是计算网衣和浮架的连接点(系缚点)各物理量的关键。

(7)
式中:jp2和jp3依次对应方形标号和三角形标号圆管的编号下标up和down依次表示图2(b)中上层圆管和下层圆管。j为任意网衣的列编号,其值为1~1+4(jbar-1)。
1.3 锚绳受力和运动
锚绳的数值模拟方法相对较成熟,采用集中质量点法把锚绳划分成假设用无质量弹簧连接的球点可较好的描述锚绳的受力和运动,与弹簧受力不同的是锚绳仅在大于原长时才受力,如式(8)所示。锚绳集中质量点受力和计算与网衣网目相似,主要包括重力、浮力、锚绳拉力、波浪拖曳力及波浪惯性力等[16-18],具体计算公式见式(8)。

(8)
式中:Manchor表示锚绳质量点的质量,ΔManchor表示锚绳质量点增加的惯性质量;aanchor表示锚绳质量点的运动加速度;Tanchor表示锚绳质量点的三个方向的矢量拉力,而Tanchor表示相邻锚绳质量点因拉伸产生的标量拉力值;FD-anchor、FI-anchor分别表示锚绳质量点的拖曳力和惯性力;Ganchor表示锚绳质量点的重力;Ffloat-anchor表示锚绳质量点的浮力;l0为锚绳原始长度,l为变形后的长度;C1、C2为锚绳材料弹性系数;d为锚绳的直径。
锚绳与浮架、锚绳与锚绳连接点的模拟方法需要特别处理,针对任一根锚绳连接点一定在锚绳首、尾质量点处,模型建立时储存数组仍保存锚绳首、尾质量点的物理量,但某时刻内仅计算一次锚绳首、尾质量点,待该时刻所有其他质量点和单元计算完成后,查找相应连接点代替保存未计算锚绳首、尾质量点的物理量(位置坐标、速度等)。文中涉及到两种浮架的锚泊方式,以图3为例,一种系缚浮架的四角端点直接连接至海底,另一种先采用小直径的辅助锚绳系缚浮架的四角端点,再连接一根大直径的锚绳后至海底。第一种锚泊方式中,每根锚绳的首、尾点形式相同,尾点本身就固定于海底,首点与浮架的四角端点运动物理量重复,因此在模型中均不参与计算。待某时刻浮鱼礁运动物理量全部计算完成后,把浮架的四角端点运动物理量直接赋值于锚绳的首点。第二种锚泊方式采用大、小两种直径的锚绳,4根辅助锚绳的尾点也是主锚绳的首点,因此在模型中4根辅助锚绳的首、尾点和主锚绳的尾点均不参与计算,单独筛选出主锚绳的首点进行计算,具体受力如图3(b)所示。待某时刻浮鱼礁运动物理量全部计算完成后,把浮架的四角端点运动物理量直接赋值于四根辅助锚绳首点,而把主锚绳的首点物理量赋值于辅助锚绳的尾点。这样处理的好处主要体现在对每类浮鱼礁构成元素的描述均相同,能够较方便地实现模型横向拓扑及后处理。

图3 两种锚泊方式计算方法Fig. 3 Calculation method of the two patterns of mooring
1.4 出水条件的判别方法
波浪作用下中上层浮鱼礁的运动位置在波谷处时,浮鱼礁各计算质量点或单元可能发生出水情况。出水条件下将导致浮鱼礁组成元素质量点或单元不受浮力和波浪力,因此数值模型的建立需要进行出水条件的判断。判断方法即浮鱼礁各计算质量点或单元的z坐标与波面的关系,如式(9)所示。当z大于η,水质点速度和加速度均为0,相应计算质量点或单元所受浮力为0;当z小于或等于η,考虑波浪水面变化的相对水深修正,如式(10)所示把z修正为zd,根据线性波理论[16]进行计算。计算修正后的zd位置的波浪水质点参数更符合出水条件下实际情况[18]。
=acos(ky-ωt)
(9)

(10)
式中:以静水面位置为x轴,垂直向上为z轴,规定波浪沿y正方向传播;η为水面变化,a为波浪振幅,k为波数,ω为圆频率;dwave为水深,zd为修正后的位置坐标。
特别指出,虽然出水条件下浮鱼礁各计算质量点或单元位置处的水质点速度和水质点加速度为0,但计算运动质量点或单元拖曳力的莫里森公式中采用的是质量点或单元相对速度(水质点速度减质量点或单元速度),而该时刻的质量点或单元速度一般不为0,需要进一步地判断,强制赋值为0。
2 数值模型验证
获取验证资料的途径主要有现场资料的采集和物理模型试验,由于文中设计的浮架式中上层浮鱼礁尚未在海区现场投放,所以采用物理模型试验的方法验证数值模型的正确性。由于浮鱼礁的运动状态是其在波浪作用下各种力共同作用的结果,为了方便和简化试验,选择4根相同锚绳的锚泊方式,并且保证浮鱼礁不出水,仅以浮鱼礁上一点的运动变化验证数值模型的正确性。
2.1 物理模型制作
针对浮架的物理模型需要满足几何相似、动力相似、运动相似,忽略圆管的刚度相似问题,即在原型中认为圆管为刚性结构。为保证浮架模型和原型之间重力和惯性力的相似,应满足弗劳德数Fr相等[19]。因为波浪作用下浮架的受力和运动带有周期性变化,还应保证周期性相似,即满足斯特劳哈尔数相等,如式(11)所示。为保证网衣水动力相似,物理模型制作中应选择网目较大的网衣,避免因网目过小导致的水流不相似问题。锚绳主要满足弹性相似,可人工添加橡皮筋增加锚绳模型的弹性。
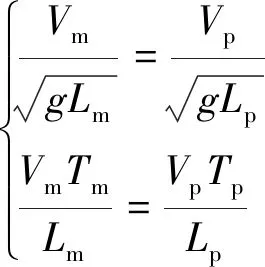
(11)
式中:V*、L*、T*为浮体结构的特征速度、特性线尺度、周期,下标m和p表示模型和原型。依据上述相似准则,可推得原型与模型各物理量之间的比例关系,参见表1。
浮架使用PVC管、接头和PVC胶黏接而成,除上下两面以外,其他面周围缠绕网衣,锚绳分别系缚在浮架的下底面端点。综合考虑波浪水槽尺度32 m×0.8 m×1 m(长×宽×高)和实际海洋牧场海区面积,选取λ=20,建立物模模型的具体结构参数见表2,实物如图4。其中,表2中CD、CI、C1、C2等为计算浮架、网衣、锚绳波浪力的主要参数,具体取值参考Zhao等[9-10],桂福坤[16],陈天华等[17-18]的研究。
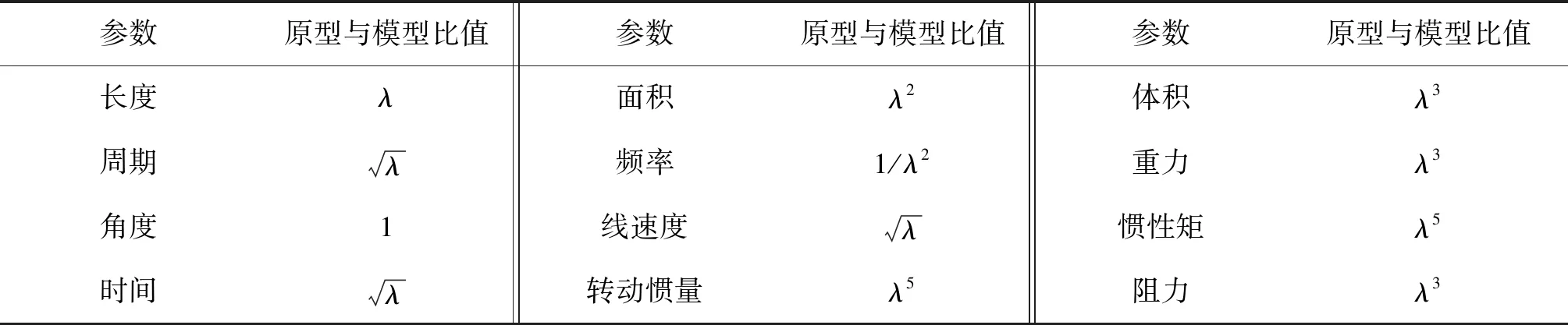
表1 原型与模型各参数间的比例关系Tab. 1 Proportional relationship of parameters between prototype and model

表2 物理模型制作参数Tab. 2 Physical model setting parameters
2.2 物理模型试验
物理模型试验在波浪水槽中进行,水深0.75 m,波浪周期为1.1 s、1.4 s、2.1 s、4.0 s,对应波浪高度为4.58 cm、16.63 cm、11.23 cm、18.36 cm,共四组波浪条件,如表3所示。波浪条件以图4中浮鱼礁模型上方的波高仪实测统计得出。利用CCD(charge coupled device,电荷耦合元件)相机采集图4中示踪点(发光二极管)连续的图像,编写程序对图像进行分析,获得模型运动变化。图像采集帧率会影响数据后期分析的准确性,帧数越多,示踪点运动轨迹越准确,试验结果精度越高,帧数取10帧每秒即可满足要求。因此,试验记录时间为120 s,帧数为10帧每秒,每种波况平行重复做3次。
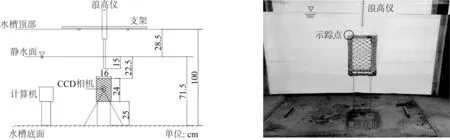
图4 浮鱼礁物理模型试验布置Fig. 4 Experiment layout of a floating fish attractor in a flume
开始造波前,浮鱼礁处于静止状态,选择浮鱼礁模型此时的位置作为参考标准,利用Matlab将不同时刻示踪点的位置标记在同一张图片上,即得到示踪点运动轨迹。使用游标卡尺测量浮鱼礁箱体管道之间的距离,同时计算浮鱼礁在水中静止状态该距离之间像素点个数,得到一个像素点空间中实际长度(距离/像素个数),在箱体不同位置重复多次计算,取平均值后一个像素在空间中表示长度为0.448 mm。先对CCD黑白图像进行灰度处理,得到各个像素点灰度值范围在0~255之间的灰度图片,其中黑色为0,白色为255。在白色点(255)周围还有像素为254、253的像素点,文中只对像素灰度值为255的像素进行计算[20]。
2.3 结果对比验证
以λ=20,按照表1中各参数间的比例关系建立浮鱼礁数值模型,计算出示踪点位置的运动轨迹后,再以λ=20缩小至物理模型尺度,物理模型试验和数值模拟的示踪点位置轨迹对比见图5,最大正、负向偏移和最大垂向偏移的对比见表3。选择水深计算相对误差率的原因是浮鱼礁礁体的运动与锚绳的弹性形变相关。相同力条件下,锚绳越长,形变量越大,而水深决定着锚绳的长度。

表3 波浪要素及试验结果对比Tab. 3 Parameters of wave cases and experiment results analysis
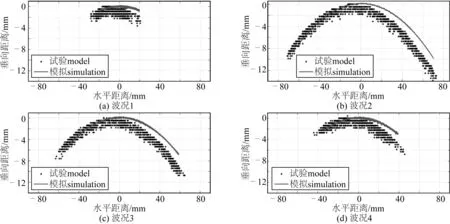
图5 不同工况下物理试验与数值模拟示踪点运动轨迹对比Fig. 5 Movement tracks of the trace points of physical experiment and numerical modeling under four group waves
根据表3和图5,对比物理模型试验和数值模拟结果发现,物理模型试验运动结果在水平方向上大于数值模拟结果;垂直方向上,左侧部分验证较好,右侧部分数值模拟结果大于物理模型试验。以波浪条件的水深作为特征长度得到的水平方向和垂直方向的最大偏移相对误差率在0.03~0.16之间。造成误差的主要原因是水槽长时间造波存在反射现象,以及物理模型制作时还使用了细铁丝系缚网衣,数值模型中并未考虑。综合考虑,建立的数值模型能描述浮鱼礁在波浪作用下的运动情况,也间接的验证了网衣和锚绳的受力。
3 中上层浮鱼礁动力响应特性
中上层浮鱼礁在波浪作用下可能为出水,因此根据第一节描述的数值方法计算了实际尺寸的浮鱼礁运动和受力变化,其中锚泊为图3中辅助锚和主锚相结合的方式。根据表2参数,浮鱼礁数值模型尺寸以λ=20还原实际大小。浮架尺寸为1.69 m×1.69 m×4.8 m,圆管的直径为0.2 m,密度相同;网衣的直径0.003 m,目脚0.32 m;主锚绳直径为0.02 m,辅助锚直径为0.01 m,图3中锚绳中间节点至浮架底部中心的距离为1 m;其余物理参数和计算参数均与表2中相同。根据舟山海域统计的5%累积频率的波浪条件[21]为波高3 m,取水深12 m,波陡1/20,根据弥散方程计算的波周期为6.7 s,与文献[21]统计的5%累积频率的波周期6 s接近。
图6给出了数值模型计算50 s后(浮鱼礁运动已经稳定)的20 s内浮架左右摆动角度(波浪方向为正、波浪反方向为负)、锚绳拉力、网衣系缚点总拉力的历时曲线(每0.1 s提取一个数据点)。可以得出,三者存在明显的周期性变化,最大锚绳拉力和最大系缚点总拉力均出现在摆动角度突然变化的位置。如图6中圆标识的位置,摆动角度负角度增大后骤然停止,致使锚绳拉力和系缚点总拉力达到最大且变化紊乱。图6中矩形时刻为浮鱼礁最大摆动角度,此时锚绳拉力最小,且与系缚点总拉力变化趋势相反。图7为最大摆动角度时刻的浮鱼礁运动状态及网衣受力分布,网衣受力仅在迎浪面和背浪面,并且拉力值远小于锚绳拉力。因此浮鱼礁摆动角度历时曲线的光滑程度可以作为优化浮鱼礁结构形状和搭配浮体、配重的依据。

图6 浮鱼礁摆动角度、锚绳拉力、网衣系缚点总拉力历时曲线 Fig. 6 Time-varying of the floating fish attractor pendulum angle, the anchor rope tension and total tension of the netting fixing points
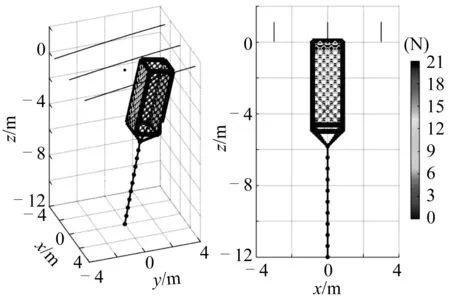
图7 最大摆动角度时刻的浮鱼礁运动状态及网衣受力分布Fig. 7 Kinestate of the floating fish attractor and netting force distribution at the moment of maximum pendulum angle
4 结 语
根据有限单元法和集中质量点法,详细阐述和推导了中上层浮鱼礁各构成组件受力和运动模拟计算方法,整体浮鱼礁各组件连接位置处点或单元的相互耦合受力和运动处理方法,以及浮鱼礁出水条件的判别方法和水质点速度、加速度的修正方法。根据动力相似和运动相似制作了浮鱼礁的物理模型,并进行了4组波浪条件的试验,对比分析浮架上一点的运动轨迹,验证了浮鱼礁运动数值模型的正确性。最后建立了辅助锚和主锚相结合的锚泊方式的浮鱼礁动力响应数值模型,通过分析浮鱼礁摆动角度、锚绳拉力、网衣系缚点总拉力历时变化。主要结论总结如下:
1) 浮鱼礁水动力数值模型建立的关键是对其各组成要素的单元划分和空间拓扑,文中采用由上而下的顺序给出了一种集浮架-网衣-锚绳为一体的拓扑方式,以及浮鱼礁运动和受力计算方法。该模型建立方法适用于小尺寸刚性和柔性结构物及其组合而成的复杂结构物的水动力特性分析。
2) 单锚系泊条件下浮鱼礁的锚绳拉力与上层礁体运动相关,摆动角度骤然变化将导致锚绳拉力和系缚点总拉力达到最大值且变化紊乱。因此,浮鱼礁摆动角度历时曲线的光滑程度可以作为优化浮鱼礁结构形状和搭配浮体、配重的依据。
3) 单锚系泊条件下浮鱼礁网衣的受力面主要为迎浪面和背浪面,并且系缚点总拉力远小于锚绳拉力。因此,浮鱼礁缠绕网衣在形成闭合空方体的同时,仅附加少量荷载,是浮鱼礁设计的优选形式。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
珠江水运(2021年20期)2021-12-09
科学养鱼(2021年4期)2021-11-30
钢管(2021年2期)2021-11-30
航空发动机(2020年3期)2020-07-24
珠江水运(2018年21期)2018-12-20
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
发明与创新·小学生(2017年8期)2017-08-04
中国海洋大学学报(自然科学版)(2017年3期)2017-03-11
