基于YOLOv3算法的绝缘子红外图像故障检测方法
2020-10-23 01:55武建华梁利辉纪欣欣刘云鹏裴少通
广东电力 2020年9期
武建华,梁利辉,纪欣欣,刘云鹏,裴少通
(1. 国网河北省电力有限公司检修分公司,河北 石家庄 050071;2.华北电力大学,河北 保定 071003)
电力外绝缘设备的在线监控与劣化诊断对于维护电力系统的安全稳定运行具有重要意义。在电网运行中,电力设备部件因绝缘破损、接触面氧化腐蚀、设计载流量不足等原因导致的劣化及过热运行,会引起具有异于常态的温度分布[1]。红外热像法基于视场内待测物体的辐射量差异,即响应辐射量的相对变化值,得到待测物体温升分布的热像图[2],依据温升曲线的异常分布,检测出待测设备是否劣化故障[3-4],该方法以其安全、高效、直观等优势,在电力系统中广泛应用[5-7]。然而,目前的红外运检策略往往通过现场采集数据,经由后台技术人员依据温升差异进行经验排查,评估绝缘子的运行状态[8-9]。由于电网规模增长,以及直升机、无人机、机器人巡线的大量应用,使得红外运检中产生的大量红外图像积压,从而降低了运检效率,桎梏着红外运检的发展。
2015年Faster R-CNN模型在COCO检测大赛中拔得头筹,也将目标检测识别的速度和效率提升到新的台阶[10]。国内一些研究学者开始将红外热成像法与深度学习理论应用相结合,为电力设备在线监测与故障诊断开辟了新的道路,推动了基于红外图像处理的电力设备诊断的发展[11-12]。文献[13]采用深度卷积神经网络算法,提取输电线路元件中的有效凸缺陷、异常扫描点数,由此实现缺陷类型识别,该算法收敛速度快、泛化能力强,但是需要人工设置阈值,检测效果不稳定,易受背景干扰。文献[14]初步探究了Faster R-CNN算法在电力设备诊断中的应用,通过建立网络共享参数,构成红外异常诊断模型,该模型能以较高的准确率检测出红外异常放电点,但训练数据为实验室数据,缺乏工程应用校对,难以确保实用性。2018年4月,YOLOv3算法横空出世,在训练准确率和训练速度上体现出无与伦比的优势,并在计算机领域受到极大关注[15-16]。文献[17-18]采用YOLOv3算法对绝缘子定位识别进行探索。文献[19]采用YOLOv3算法实现了可见光通道下绝缘子串断裂的检测。文献[20]实现了基于YOLOv3算法的高压设备故障发热点红外检测,但涉及绝缘子部分的研究不多。目前该算法在故障绝缘子红外图像检测相关的研究工作较为缺乏,尚未得到应用和推广。
本文结合现场检测和供电公司采集获取的大样本外绝缘设备红外通道数据,针对输变电设备带电红外检测过程中面临的伪彩色类型多样、背景干扰复杂、拍摄角度不一、红外图像叠加图形字符等多种问题,构建不同背景干扰下的绝缘子劣化特征识别数据库。基于YOLOv3算法的评判机制,以及非监督学习外绝缘设备红外劣化图像特征,研究并建立绝缘子红外诊断模型。该方法可有效定位出绝缘子红外图像中的异常发热点,为指导电力系统外绝缘设备运检,减少人力、物力消耗,提高电网运行的智能化监控水平,提供新的思路;同时,该方法融合了数字图像处理、深度学习、机器学习,是新的故障诊断方法,具有重要的学术意义。
1 YOLOv3算法结构及原理
YOLO的本质是将目标检测问题处理成回归问题,用单一卷积神经网络结构预测边界框和类别概率,速度快,可实现实时监测[21-22]。YOLOv3算法是YOLO系列目标检测算法的第3代,图1为该算法的结构图。图1(b)为DBL结构,其中BN组件为批量标准化,Leaky ReLU为带泄露修正线性单元,是ReLU的改进函数。

图1 YOLOv3算法结构Fig.1 YOLOv3 algorithm structure
该算法拥有106层完全卷积的构架,包含卷积、路径、批量标准化、残差块、跳连接、上采样以及YOLO层[23]。整个模型在功能上可分为特征提取和处理输出,特征提取部分为Darknet-53和残差网络的组合;处理输出采用类似于特征金字塔网络(feature pyramid network,FPN);卷积层主要采用1×1和3×3两类滤波器,前者用于压缩特征表示,后者用于减小宽度和高度,增加信道数量[24]。复杂的卷积结构通常意味着模型的训练难度加大、收敛速度变慢,为解决这一问题,YOLOv3算法通过连接层和路径层实现跨层连接,促进多个不同特征的融合学习。上采样层通过2个上采样将小分辨率与大分辨率的特征图有机结合,增强小目标物体识别。
相较于之前的版本,YOLOv3算法改进主要有3点:①调整分类网络结构,构建Darknet-53框架,取代Darknet-19;②为提高较小目标物体的检测精度,引入多尺度特征进行对象检测;③考虑到检测目标标签的相容性,修改目标分类函数,以Logistic函数取代softmax函数。
1.1 Darknet-53网络结构
YOLOv3算法的分类网络继承了YOLOv2算法的Darknet-19网络,并在其结构上去掉所有最大值池化层,增加了更多卷积层加深网络,并引入残差模型,共包含23个残差块,经过5次下采样,输出大小为网络输入的1/32。改进后的网络具备53层卷积,命名为Darknet-53。该网络借鉴了残差网络的做法,在一些层之间设置了快捷链路。
图1(a)虚线框内即为Darknet-53网络的基本结构,网络采用256×256×3作为输入,图中的残差1—8表示具有相对应个数重复的残差组件,每个残差组件由2个卷积层和1个快捷链路构成〔如图1(c)所示〕。
1.2 多尺度特征检测
不同于YOLOv2算法的passthrough结构检测细粒度特征,YOLOv3算法进一步采用3个不同尺度的特征图进行对象检测。如图1(a)所示,输入数据集通过Darknet-53网络,在79层后经过卷积得到第1个尺度的检测结果,输入图像32倍下采样的特征图;特征图的倍数较高,感受野较大,适合检测图像中目标尺寸比较大的待测物体,标记为输出1。为实现检测的精细化,另一条支路在第79层的特征图上做上采样,与第61层特征图进行张量拼接,得到第91层较为精细的特征图,同时经过卷积得到相对输入图像16倍下采样的特征图,该特征图的感受野中等,适合检测中等尺度的目标物体,标记为输出2。为了检测更小的物体,在第91层特征图上进一步采样,并与第36层特征图进行张量拼接,获得相对输入图像8倍的下采样特征图,其感受野最小,适合检测小尺寸物体,标记为输出3。
1.3 网络识别特征和计算方法
1.3.1 交并比计算
交并比(intersection over union,IOU)是对象类别分割问题的标准性能度量,其表明在1组图像中存在对象的预测区域和地面实况区域之间的相似性[25]。YOLOv3算法以IOU分数RIOU作为评估模型的指标之一,其表达式为
(1)
其中
式中:V={1,2,…,N}为训练集中所有图像的像素集合;X为集合V上的像素概率的网络输出;Y为集合V的地面实况区域分配。
1.3.2 边界框计算
将输入图像分成均等大小的单元格,计算中心点所在单元坐标位置,从而实现预测边界框[16],计算公式如下:
bx=δ(tx)+cx;
(2)
by=δ(ty)+cy;
(3)
bw=Pwetw;
(4)
bh=Pheth.
(5)
式中:tx、ty为预测坐标偏移量,tw、th为尺度缩放;Pw、Ph为预设边界框的宽度和高度;cx、cy为单元格的宽度和高度,即坐标偏移量;δ(tx)、δ(ty)为中心点在其所在单元内的单元坐标;bx、by、bw、bh分别为边界框相对于输入图像的坐标位置和大小,即预测输出坐标。
1.3.3 维度聚类
在计算标准框时,将所有标注框中心点的x、y坐标都置为0,这样所有的标注框都置于相同位置,从而有效计算标注框之间的相似度。YOLOv3算法采用K-means聚类确定标准框[26],其聚类距离度量函数
D=1-RIOU.
(6)
1.3.4 卷积核计算
最后一层卷积为1×1卷积,其卷积核尺寸Kker计算如下:
Kker=[B(5+C)×1×1].
(7)
式中:B为网络可预测边界框数目;C为类别概率;5代表4个坐标值(tx、ty、tw、th)和1个物体置信度。对于绝缘子红外故障诊断数据集,C=1,B=3。
1.3.5 置信度计算
先判断区域内是否含有目标物体,如果有,则目标对象O设为1,否则为0;随即计算RIOU,进而计算置信度分数Fcon,即
Fcon=P(O)RIOU,
(8)
式中P(O)用于判定预测框内是否含有目标物体,仅有0/1这2个值。
1.3.6 损失函数
YOLOv3算法的误差包含置信度误差、分类误差和定位误差3类,均采用二值交叉熵损失逻辑分类器(binary cross entropy,BCE)进行计算,交叉熵公式为
Eloss=-[pilogqi+(1-pi)log(1-qi)].
(9)
式中:Eloss为交叉熵损失值;pi为样本期望输出;qi为样本实际输出。
2 绝缘子红外图像故障检测算法实现
通过现场拍摄和采集图像,构建绝缘子红外故障图谱库,采用LabelImg完成数据集标注,通过图像预处理进行数据增强,提高模型的鲁棒性。采用标注框K-means聚类确定标准框大小,进而确定YOLOv3算法3个尺度的网络节点尺寸。以Darknet-53网络为初始模型框架,代入数据集进行迭代训练,通过不断修改参数,提高模型识别准确度和框选置信度,达到损失函数收敛阈值,构建出红外图像故障定位诊断模型。
2.1 训练环境说明
本文所采用的训练环境参数包括:戴尔(DELL)PowerEdge T640塔式服务器,CPU为至强3106,GPU为RTX2080×4,显卡为GeForce GTX 1080Ti 11 G,内存32 GB,固态硬盘512 GB,机械硬盘4 TB。
2.2 数据集预处理
现场采集拍摄的绝缘子红外图像1 673张,考虑到实际采集图像拍摄角度的变化影响,对采集到的数据集样本进行随机旋转角度处理,如图2所示。此外,为了使训练模型更具普适性,在YOLOv3算法内设置数据增强函数,对原始数据集进行预处理,分别为调整饱和度Dsat、调整曝光度Dexp和调整色调Dhue,由此生成更多的训练样本,参数设定依次为Dsat=1.5,Dexp=1.5,Dhue=0.1。
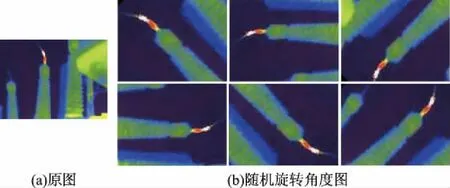
图2 随机旋转角度预处理样图Fig.2 Preprocessing sample of random rotation angle
2.3 确定YOLOv3算法标准框尺寸
YOLOv3算法采用多尺度检测方式,由文献[13]可知,在VOC数据集中,这组标准尺度为[10,13]、[16,30]、[33,23]、[30,61]、[62,45]、[59,119]、[116,90]、[156,198]、[373,326],目标大小差距很大,不太适用于绝缘子红外图像故障检测;因此需要依据数据集样本特征设定网络节点输出的标准尺寸,提高边界框的检出率。本文采用K-means聚类算法进行标注框的聚类分析,确定边界框大小。为了更好获得聚类效果,将标注框数据归一化,如公式(10)—公式(13)所示:
(10)
(11)
(12)
(13)
式中:xmin为标注框左下角横坐标;xmax为标注框右下角横坐标;ymin为标注框左下角纵坐标;ymax为标注框左上角纵坐标;xsize、ysize为输入图像的宽度和高度。
对获取到的归一化数据进行聚类分析,图3所示为标注框的聚类结果图。将数据反归一化处理,确定标准框尺寸为[105,153]、[49,250]、[34,132]、[114,43]、[33,78]、[47,56]、[52,25]、[22,34]、[16,15]。
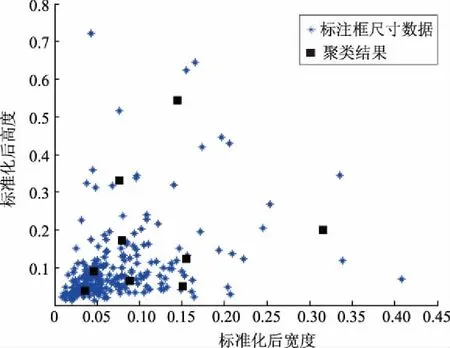
图3 聚类结果Fig.3 Clustering result
建立以Darknet-53网络为基础的YOLO底层模型框架,依据劣化绝缘子的红外特征确立3个网络节点输出尺寸;随后依据训练图像的大小调节参数,使图像缩放在100~280之间,通过前向传播和后向传播迭代进行训练,当训练达到最优RIOU最低Eloss时,保存权重并退出训练。
每种下采样尺度设定3种先验框,共聚类出9个尺寸。在分配上:最小的13×13特征图上应用较大的先验框[105,153]、[49,250]、[34,132],适合检测较大的对象;中等的26×26特征图上应用中等的先验框[114,43]、[33,78]、[47,56],适合检测中等的对象;较大的52×52特征图上应用较小的先验框[52,25]、[22,34]、[16,15],适合检测较小的对象。3个YOLO输出层分别对各自前一层的特征库进行解析,输出得到诊断预测信息和预测置信度。其映射到3个尺度的输出张量,代表图像各个位置存在各种对象的概率。通过横向比较不同尺度下的RIOU,完成红外图像的诊断识别。
依靠人为干预调整参数,初始速率设置在0.01~0.001之间,45 000轮后,逐渐减缓;接近训练结束时衰减达到100倍以上,训练过程中依Eloss的变化和其他指标进行动态调整。
2.4 训练过程
训练速率决定着权值更新的速度,其参数值设置太大会使结果错过最优值,太小会使下降速度过慢,陷入局部收敛。
2.4.1 交叉熵损失的价值Eloss
图4为不同训练速率下的Eloss曲线图,由图4(a)可知,训练速率为0.000 1的Eloss曲线初值较低,随后由于步长过小,经过3个波峰波谷后才收敛稳定,整体曲线下降速率较低。随着训练速率增大,曲线收敛速率逐渐加快,当提高速率为0.05时,虽然前期收敛速度最快,但由于步长太大错过最优值,Eloss曲线在第995轮次后反向递增至无穷大,收敛失败。由图4(b)可知,在迭代50 000轮次后,Eloss值收敛在0.02左右。
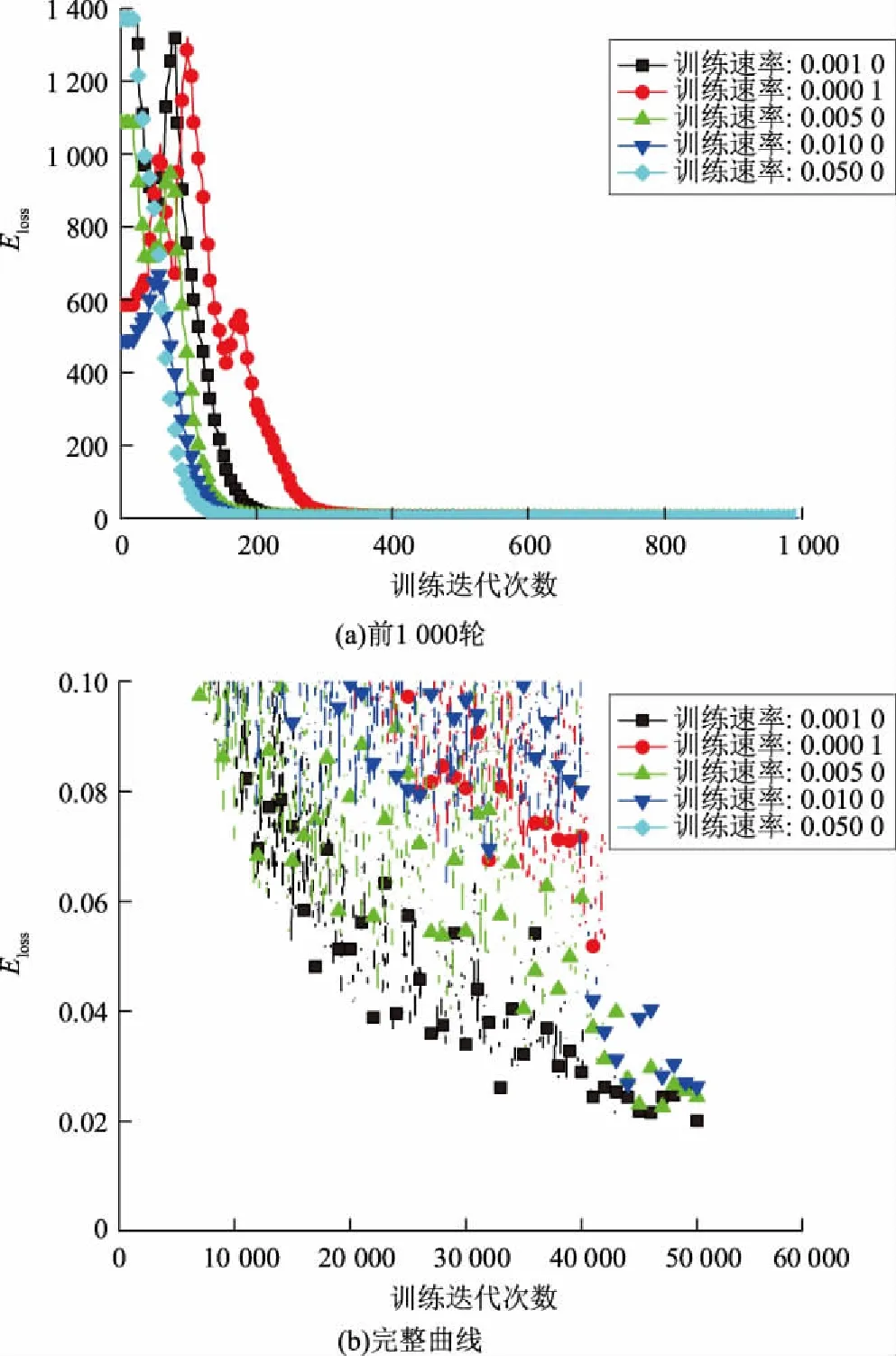
图4 不同训练速率下的Eloss曲线图Fig.4 Eloss curves under different training speed
2.4.2 交并比和置信度
图5和图6分别为不同训练速率下的RIOU曲线和置信度曲线。随着训练的进行,绝缘子故障识别的训练效果不断优化,曲线逐渐上升并呈收敛态势,最终置信度曲线经过微弱振荡收敛在99.8%左右,RIOU曲线在迭代40 000轮次后进一步抬升,最终收敛在90.2%左右。根据曲线对比可知,采用0.000 1训练速率,由于步长太小,在迭代10 000轮次后仍然难以收敛;采用0.05训练速率,因步长过大,在迭代次数达到1 000时,错过最优值,模型收敛失败。
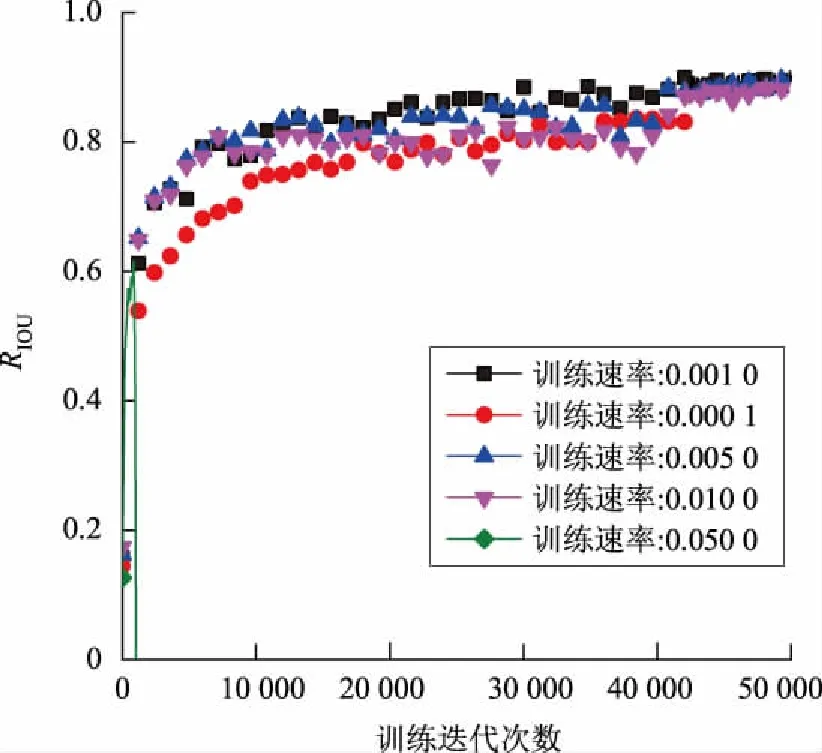
图5 不同训练速率下的RIOU曲线Fig.5 RIOU curves under different training speed
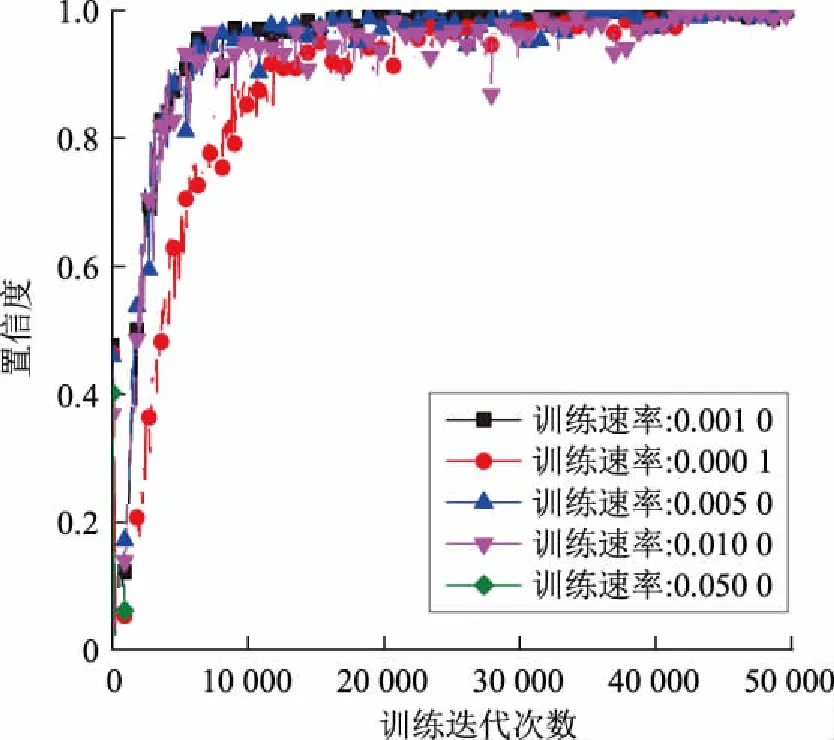
图6 不同训练速率下的置信度曲线Fig.6 Confidence curves under different training speed
2.4.3 现场对比
图7为不同训练速率下的检测效果对比图,由图7可知:0.01训练速率下的模型目标框选和置信度表现更优。虽然图7(a)的识别置信度为97.33%,不及参数0.000 1和0.005的99.76%和98.88%,但相差不大。对于故障程度较轻的异常发热〔如图7(c)〕,参数0.005的识别模型并未检出,而0.000 1和0.001参数识别的置信度分别为77.22%和59.69%,均不及参数0.01模型的85.31%。
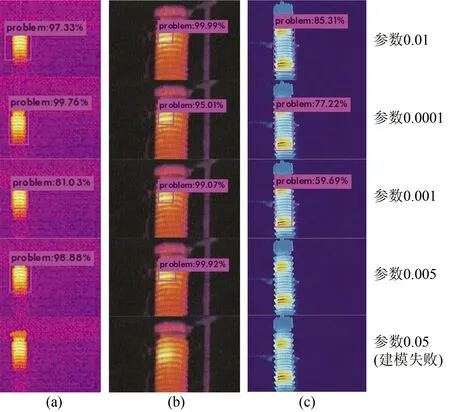
图7 检测效果对比Fig.7 Comparison of detection effects
3 现场应用
通过现场检测,红外成像可以检出的外绝缘设备异常放电的典型缺陷包括:低值/零值放电、污秽引起的局部放电、破损/裂纹产生的局部过热等。本文对现场采集的400多张测试样本,在YOLOv3模型中进行测试和分析。
3.1 低值/零值绝缘子
图8所示为低值绝缘子检测红外图像。瓷绝缘子由于瓷、水泥、铁脚和铁帽等部位的热膨胀系数各不相同,当绝缘子受冷热变化时,瓷件受到较大的应力,铁帽内部绝缘子容易开裂,或在遭受雷击时被击穿而形成低值或零值,在红外检测中,呈现整体温度异常。检测时,部分整体发热不明显的绝缘子,检出框覆盖不全〔如图8(c)〕,但基本可以有效检出目标。
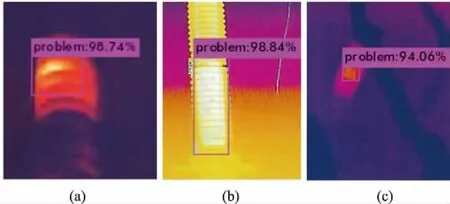
图8 低值绝缘子检测Fig.8 Low-value insulator detection
3.2 污秽
运行在户外的绝缘子,受大气污染或尘土沉积形成污秽层。在高湿环境下,污秽物中可溶性电解质吸收水分,形成导电水膜,容易引起局部放电,主要呈现红外局部过热,且与正常相差不大的特征。在检测时,过热明显的污秽绝缘子可被有效识别并检出,过热程度较轻的绝缘子会出现不同程度的漏检,如图9(c)所示。
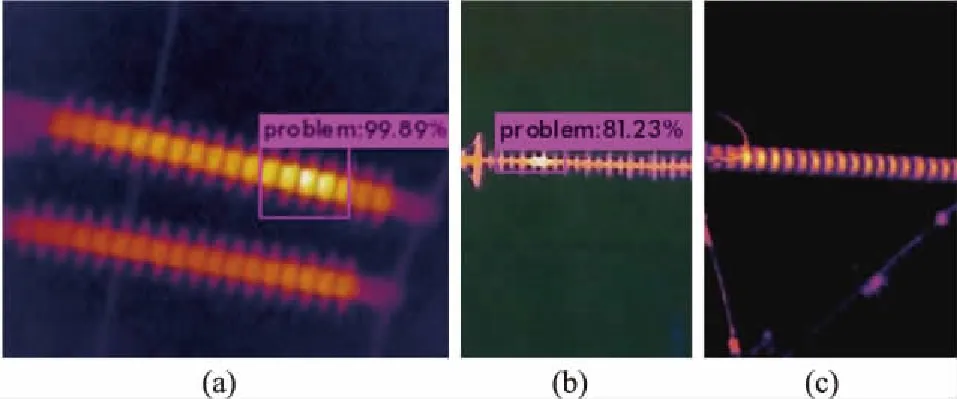
图9 污秽绝缘子检测Fig.9 Contaminated insulator detection
3.3 破损/裂纹
受雷击、覆冰、自爆、闪络等因素影响,运行绝缘子可能存在不同程度的破损、横向或纵向裂纹,多发于绝缘子的端部、底部。在检测时,故障点过热特征明显,基本可以有效检出,且置信度较高,如图10所示。
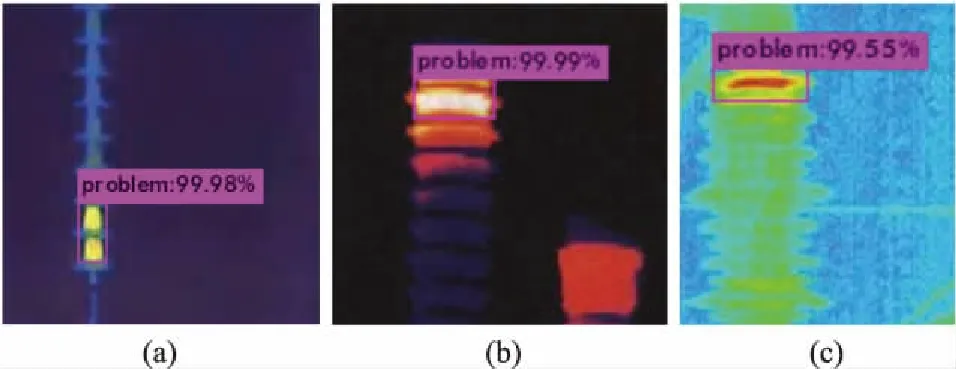
图10 破损/裂纹绝缘子检测Fig.10 Broken/cracked insulator detection
3.4 多点异常发热
在较少情况下,出现不止1项故障设备。在检测这类图像时,虽然有的设备框选置信度不高,但是基本可以有效检出,具有良好的工业应用前景,如图11所示。
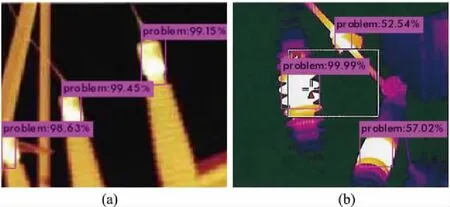
图11 多点异常发热检测Fig.11 Multi-point abnormal heating detection
3.5 样本检测结果
基于YOLOv3红外诊断算法,对400张测试样本进行检测,样本共包含异常放电点673个。经测试,该模型算法可标记出故障点580个,其中误检项26个,对于大多数红外异常发热点均可有效识别并正确标记,测试平均识别置信度为0.812 7,误检率为0.044 8,漏检率为0.176 8。
4 结束语
本文以红外成像仪现场采集的绝缘子图像为研究对象,构建了基于YOLOv3算法的绝缘子红外图像故障检测模型。通过统一调节随机旋转角度、曝光度、饱和度、色调等,增加训练集数量,使模型更具有普适性。采用K-means聚类确定网络节点输出尺寸,比较不同训练速率下的Eloss、RIOU、置信度曲线以及应用效果,确定最优参数为0.01,并针对现场常见的几种故障情况进行测试。实验结果表明,该模型在低值/零值放电、破损/裂纹产生局部过热时的表现性能较优,对于过热程度较轻的污秽绝缘子会出现一定的漏检;识别置信度为0.812 7,误检率为0.044 8,漏检率为0.176 8。该方法为绝缘子红外智能化运检提供了新的检测方法,具有一定的工程意义。
猜你喜欢
环球时报(2022-05-23)2022-05-23
小型微型计算机系统(2022年4期)2022-05-09
计算技术与自动化(2022年1期)2022-04-15
核科学与工程(2021年4期)2022-01-12
金桥(2021年4期)2021-05-21
机电产品开发与创新(2020年2期)2020-05-07
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
电子制作(2018年17期)2018-09-28
计算机应用(2018年5期)2018-07-25