
RS码的分布式编码协作系统方案设计
2020-10-22 05:13黄雅云
盐城工学院学报(自然科学版) 2020年3期
黄雅云
(南京航空航天大学 电子信息工程学院,江苏 南京 210000)
1959年,Reed和Solomon提出可以利用有限域中的多项式构造RS码(Reed-Solomon code)[1]。RS码的基础是循环码,可以用代数方法来构造和分析,因此可以找到多种实用的译码方法,且易于硬件实现。1961年Gorenstein等[2]发现RS码是BCH码(Bose,Ray-Chaudhuri,Hocquenghem Code)的一种子码,并提出了译码算法,但该算法在纠正大量错误时不够理想;1967年,Berlekamp[3]提出了Berlekamp-Massey译码算法,使得RS码能够纠正大量随机错误;1975年,Sugiyama等[4]证明欧几里得算法能够用于译码。现今RS码因具有强大的纠错性能,在无线通信、广播电视以及深空通信中有着广泛的应用[5]。
目前,RS码编码协作系统中使用的简单联合译码算法或智能联合译码算法,目的节点均不能充分利用获得的两路信号,误码率也不够理想。本文在参考前人文献资料的基础上,提出合并-智能联合译码算法。该算法能够充分利用获得的两路信号,进一步降低信噪比和误码率,提高RS码分布式编码协作系统的性能。
1 相关工作
1.1 信源与中继的相关编码
基于协作通信的三节点经典通信模型[6],RS码编码协作场景的方案如图1所示。一个完整的编码协作传输流程,从信源产生信息到目的节点完整地译出信息,需要2个时隙[7]。在第1个时隙,信源首先将二进制序列m1映射为GF(2m)中符号序列a1,其中2m=n+1,n是码字长度;然后系统RS1(n,k1,d1)编码将符号序列a1编码,其中k1为信息位长度,d1为码字最小距离。由RS码的基础理论[8-9]可知,RS码的码字最小距离d1=n-k1+1。
RS1的生成多项式g1(x)由n-k1个根组成,g1(x)多项式可表示为:
g1(x)=(x-α)(x-α2)…(x-αn-k1)=
(1)

RS1码可以通过下式产生。
b(x)=a(x)g1(x)
(2)

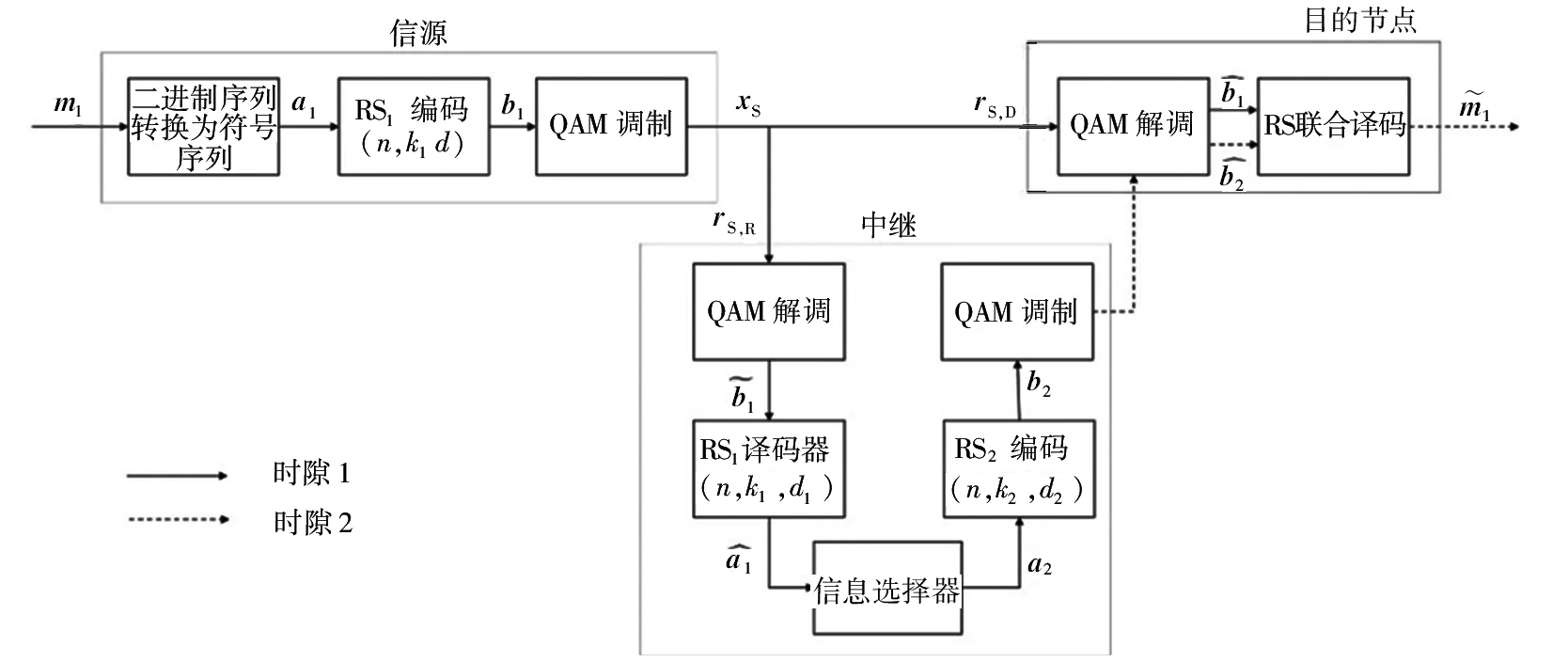
图1 RS码的编码协作系统框架结构Fig 1 Frame structure of RS code coding cooperation system
在编码协作方案中,使用系统RS码,其生成多项式可表示为:
b1(x)=xn-k1a1(x)+p1(x)
(3)


p1(x)可以通过GF(2m)中的多项式除法得到,计算式如下:
(4)


(5)

同样地,在第1个时隙,目的节点也将收到经信道传播的信息xS,令其为rS,D,表达式为:
(6)


g2(x)=(x-α)(x-α2)…(x-αn-k2)=
(7)

由于k1>k2,g2(x)比g1(x)有更多的根,所以RS2的纠错能力比RS1的高。系统RS2码可以表示为:
b2(x)=xn-k2a2(x)+p2(x)
(8)

在此系统中,中继从信号
中选择前k2个符号作为信息a2。同样地,可以得到校验多项式p2(x),计算式如下:
(9)


在第2个时隙,目的节点收到中继传输的信息rR,D,可表示为:
(10)
式中:hR,D是瑞利衰落系数,nR,D是高斯白噪声序列。

1.2 目的节点联合译码算法
联合译码是编码协作系统的关键特征之一,常用的联合译码算法有简单联合译码算法和智能联合译码算法。
1.2.1 简单联合译码算法
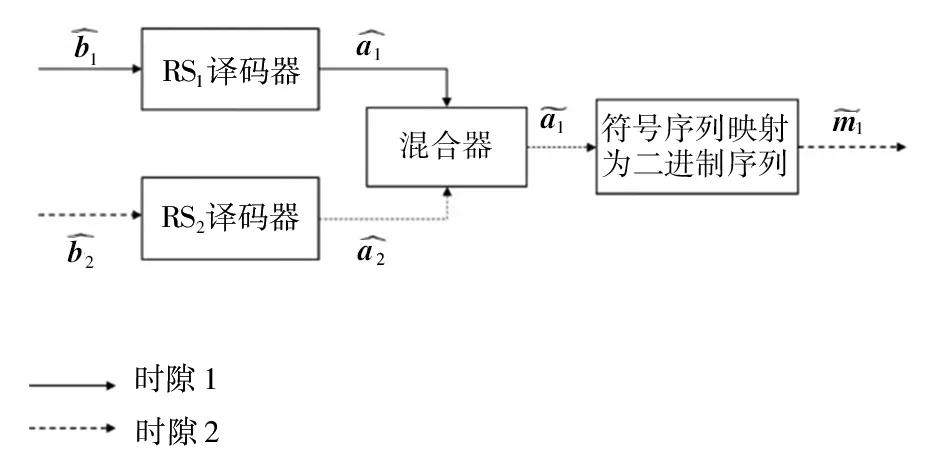
图2 简单联合译码算法框架Fig 2 Framework of simple joint decoding algorithm
1.2.2 智能联合译码算法
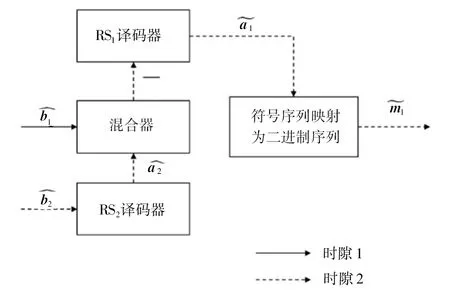
图3 智能联合译码算法原理Fig 3 Principle of intelligent joint decoding algorithm
1.3 两种联合译码算法的比较

在智能联合译码算法中,不需要使用信噪比阈值来判断混合器的使用方式,而是使用RS2译码器的输出作为RS1译码器输入的一部分,因为RS2译码器可以纠正一部分传输错误,所以智能联合译码算法能够提高系统性能。但是在该联合译码算法中,目的节点仍旧不能充分利用获得的两路信号以降低系统误码率。
2 合并-智能联合译码算法设计
2.1 系统设计
为了目的节点能够充分利用获得的RS1和RS2两路信号,进一步降低系统误码率,提出了合并-智能联合译码算法,其具体框图如图4所示。
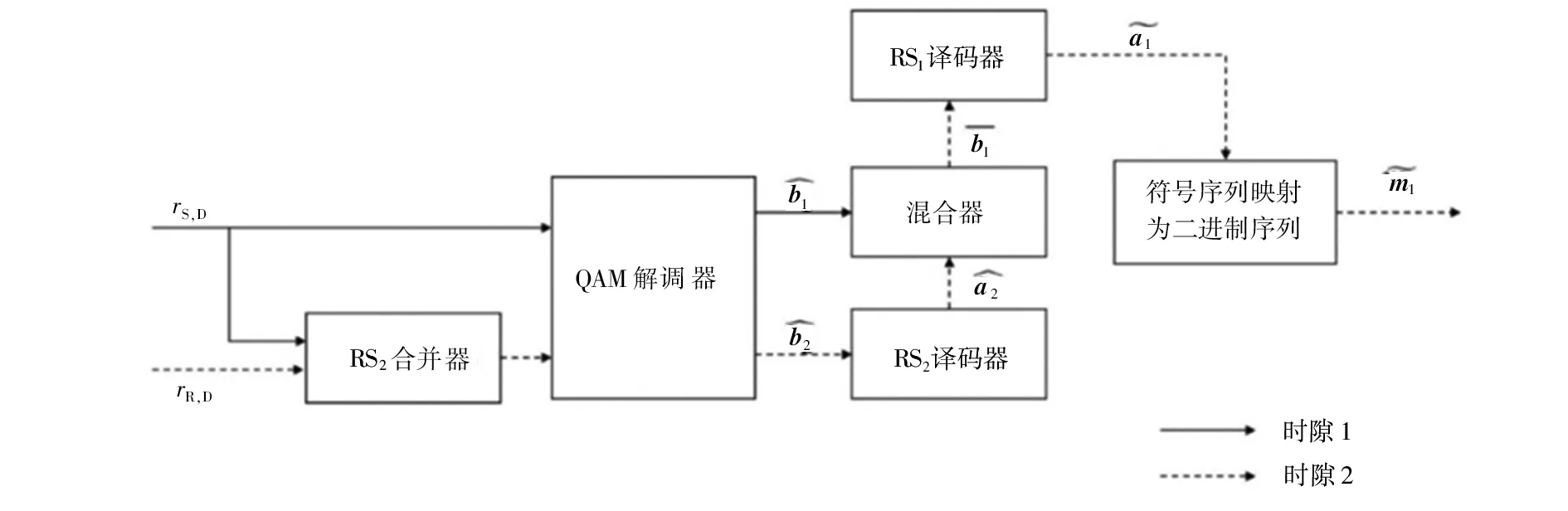
图4 合并-智能联合译码算法原理图Fig 4 Schematic diagram of merge-intelligent joint decoding algorithm
图4中,在目的节点的解调器之前增加一个合并器,将RS1的前k2个调制符号与RS2的k2个信息位的调制符号合并,合并系数参考协作通信中的最大比合并算法[12]。经过RS2合并器之后,调制序列为
(11)

由此,系统可以充分利用RS1和RS2两路信号,使系统误码率进一步降低。
2.2 实现步骤
为实现上述算法,具体实现步骤如下:

3 系统仿真及性能分析
在系统采用RS码的编码协作方案的基本框架时,分别对简单联合译码算法、智能联合译码算法与合并-智能联合译码算法3种不同的联合译码算法进行仿真实验,仿真条件如下:RS1码字为(63,51,13)RS码,RS2码字为(63,39,25)RS码,在AWGN信道中传输,使用64-QAM调制方式,设置信源—中继信道为理想信道,即σS-R=,且σR-D=σS-D+1。仿真结果如图5、图6。图5、图6中横坐标为信源—目的节点信道的信噪比,使用分贝数表示,单位为dB;纵坐标为误比特率(Bit Error Ratio,BER)。所示。需要注意的是使用合并-智能联合译码算法时,合并系数α随信噪比而变化。
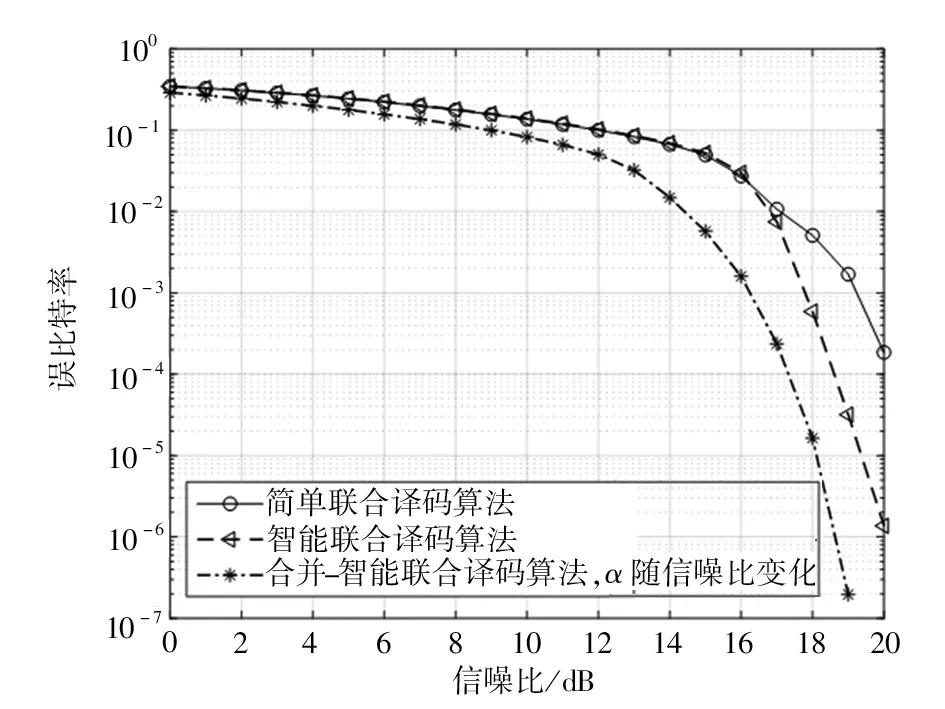
图5 不同联合译码算法的性能比较Fig 5 Performance comparison between different joint decoding algorithm
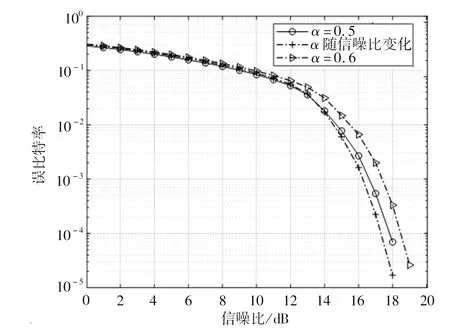
图6 合并-智能联合译码算法中使用不同合并系数的性能仿真Fig 6 Performance simulation of merge-intelligent joint decoding algorithm with different combining coefficients
图5为不同联合译码算法的性能仿真比较。从图5可以看出,当误比特率为10-3时,与非协作系统(non-coop)相比,使用简单联合译码算法的系统获得的增益只有0.6 dB,性能有限;使用智能译码算法的系统可以获得2.2 dB左右的增益;使用合并-智能译码算法的系统可以获得3.7 dB左右的增益。由此可见,使用合并-智能译码算法的系统误比特性能比使用智能译码算法的系统好。在低信噪比条件下,即当信噪比低于10 dB时,使用3种不同译码算法的系统误比特率性能相近;但当信噪比大于10 dB后,使用合并-智能译码算法的系统可以获得较大的性能提升。
图6给出了合并-智能联合译码算法中使用不同合并系数的性能仿真。从图6可以看出,当系统使用合并-智能联合译码算法时,不同的合并系数将会影响系统的性能,其中合并系数α随信噪比变化时,系统的性能会略好一些;当误比特率为10-4、合并系数为自适应系数时,系统性能比系数为0.5的好0.4 dB左右,比系数为0.6的好1 dB左右。
综上所述,合并-智能联合译码算法能够充分利用获得的两路信号,进一步降低信噪比和误码率,提高RS码的分布式编码协作系统的性能。
4 结语
本文分析了RS码的编码协作系统,研究了基于RS码的简单联合译码算法、智能联合译码算法。在此基础上,提出了合并-智能联合译码算法,并通过仿真比较了简单联合译码算法、智能联合译码算法与合并-智能联合译码算法3种不同的联合译码算法的性能。结果表明:合并-智能联合译码算法能够充分利用获得的两路信号,使其分集增益,进一步降低信噪比和误码率,提高RS码的分布式编码协作系统的性能。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
雷达与对抗(2022年1期)2022-03-31
沈阳工业大学学报(2021年6期)2021-11-29
现代电子技术(2021年7期)2021-04-08
现代计算机(2021年36期)2021-03-14
北京航空航天大学学报(2019年9期)2019-10-26
计算机与数字工程(2019年7期)2019-07-31
数字通信世界(2019年8期)2019-02-13
雷达学报(2017年3期)2018-01-19
遥测遥控(2015年2期)2015-04-23
